201 & 202-05 Gaussian Imagery
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Object-Image Real Image Virtual Image
Object-Image • A physical object is usually observed by reflected light that diverges from the object. • An optical system (mirrors or lenses) can 3.1 Images formed by Mirrors and Lenses produce an image of the object by redirecting the light. • Images – Real Image • Image formation by mirrors – Virtual Image • Images formed by lenses Real Image Virtual Image Optical System ing diverging erg converging diverging diverging div Object Object real Image Optical System virtual Image Light appears to come from the virtual image but does not Light passes through the real image pass through the virtual image Film at the position of the real image is exposed. Film at the position of the virtual image is not exposed. Each point on the image can be determined Image formed by a plane mirror. by tracing 2 rays from the object. B p q B’ Object Image The virtual image is formed directly behind the object image mirror. Light does not A pass through A’ the image mirror A virtual image is formed by a plane mirror at a distance q behind the mirror. q = -p 1 Parabolic Mirrors Parabolic Reflector Optic Axis Parallel rays reflected by a parabolic mirror are focused at a point, called the Parabolic mirrors can be used to focus incoming parallel rays to a small area Focal Point located on the optic axis. or to direct rays diverging from a small area into parallel rays. Spherical mirrors Parallel beams focus at the focal point of a Concave Mirror. •Spherical mirrors are much easier to fabricate than parabolic mirrors • A spherical mirror is an approximation of a parabolic Focal point mirror for small curvatures. -

Curriculum Overview Physics/Pre-AP 2018-2019 1St Nine Weeks
Curriculum Overview Physics/Pre-AP 2018-2019 1st Nine Weeks RESOURCES: Essential Physics (Ergopedia – online book) Physics Classroom http://www.physicsclassroom.com/ PHET Simulations https://phet.colorado.edu/ ONGOING TEKS: 1A, 1B, 2A, 2B, 2C, 2D, 2F, 2G, 2H, 2I, 2J,3E 1) SAFETY TEKS 1A, 1B Vocabulary Fume hood, fire blanket, fire extinguisher, goggle sanitizer, eye wash, safety shower, impact goggles, chemical safety goggles, fire exit, electrical safety cut off, apron, broken glass container, disposal alert, biological hazard, open flame alert, thermal safety, sharp object safety, fume safety, electrical safety, plant safety, animal safety, radioactive safety, clothing protection safety, fire safety, explosion safety, eye safety, poison safety, chemical safety Key Concepts The student will be able to determine if a situation in the physics lab is a safe practice and what appropriate safety equipment and safety warning signs may be needed in a physics lab. The student will be able to determine the proper disposal or recycling of materials in the physics lab. Essential Questions 1. How are safe practices in school, home or job applied? 2. What are the consequences for not using safety equipment or following safe practices? 2) SCIENCE OF PHYSICS: Glossary, Pages 35, 39 TEKS 2B, 2C Vocabulary Matter, energy, hypothesis, theory, objectivity, reproducibility, experiment, qualitative, quantitative, engineering, technology, science, pseudo-science, non-science Key Concepts The student will know that scientific hypotheses are tentative and testable statements that must be capable of being supported or not supported by observational evidence. The student will know that scientific theories are based on natural and physical phenomena and are capable of being tested by multiple independent researchers. -

Laboratory 7: Properties of Lenses and Mirrors
Laboratory 7: Properties of Lenses and Mirrors Converging and Diverging Lens Focal Lengths: A converging lens is thicker at the center than at the periphery and light from an object at infinity passes through the lens and converges to a real image at the focal point on the other side of the lens. A diverging lens is thinner at the center than at the periphery and light from an object at infinity appears to diverge from a virtual focus point on the same side of the lens as the object. The principal axis of a lens is a line drawn through the center of the lens perpendicular to the face of the lens. The principal focus is a point on the principal axis through which incident rays parallel to the principal axis pass, or appear to pass, after refraction by the lens. There are principle focus points on either side of the lens equidistant from the center (See Figure 1a). Figure 1a: Converging Lens, f>0 Figure 1b: Diverging Lens, f<0 In Fig. 1 the object and image are represented by arrows. Two rays are drawn from the top of the object. One ray is parallel to the principal axis which bends at the lens to pass through the principle focus. The second ray passes through the center of the lens and undeflected. The intersection of these two rays determines the image position. The focal length, f, of a lens is the distance from the optical center of the lens to the principal focus. It is positive for a converging lens, negative for a diverging lens. -
Lecture 37: Lenses and Mirrors
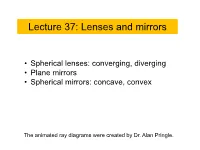
Lecture 37: Lenses and mirrors • Spherical lenses: converging, diverging • Plane mirrors • Spherical mirrors: concave, convex The animated ray diagrams were created by Dr. Alan Pringle. Terms and sign conventions for lenses and mirrors • object distance s, positive • image distance s’ , • positive if image is on side of outgoing light, i.e. same side of mirror, opposite side of lens: real image • s’ negative if image is on same side of lens/behind mirror: virtual image • focal length f positive for concave mirror and converging lens negative for convex mirror and diverging lens • object height h, positive • image height h’ positive if the image is upright negative if image is inverted • magnification m= h’/h , positive if upright, negative if inverted Lens equation 1 1 1 푠′ ℎ′ + = 푚 = − = magnification 푠 푠′ 푓 푠 ℎ 푓푠 푠′ = 푠 − 푓 Converging and diverging lenses f f F F Rays refract towards optical axis Rays refract away from optical axis thicker in the thinner in the center center • there are focal points on both sides of each lens • focal length f on both sides is the same Ray diagram for converging lens Ray 1 is parallel to the axis and refracts through F. Ray 2 passes through F’ before refracting parallel to the axis. Ray 3 passes straight through the center of the lens. F I O F’ object between f and 2f: image is real, inverted, enlarged object outside of 2f: image is real, inverted, reduced object inside of f: image is virtual, upright, enlarged Ray diagram for diverging lens Ray 1 is parallel to the axis and refracts as if from F. -

Mirror Set for the Optics Expansion
Mirror Holders The mirror holders have the mirrors permanently mounted. Do not remove the Mirror Set mirrors. The convex mirror is fixed in position. The concave mirror can be rotated about a vertical axis in order to offset the image slightly to the half for the Optics screen. Screen Holder Assembly Expansion Kit A half screen is used so that light from a luminous source can pass (Order Code M-OEK) through the open area, reflect from the convex mirror, and then fall on the screen region. The Mirror Set consists of a concave mirror, a convex mirror, and a half screen. When used with components from the Optics Expansion Kit (order code OEK) and a Light Source Assembly (not included with Mirror Set) Vernier Dynamics Track (order code TRACK), basic experiments on mirror optics The light source is part of the Optics Expansion Kit, and is not part of the Mirror Set. can be performed. However, most experiments require the light source, so it is described here for The Mirror Set allows students to investigate image formation from concave and convenience. convex lenses. The light source uses a single white LED. A rotating plate lets you choose various types of light for experiments. The open hole exposes the LED to act as a point Parts included with the Mirror Set source. The other openings are covered by white plastic to Fixed Convex Mirror (–200 mm focal length, shown above at left) create luminous sources. The figure “4” is for studying image Half Screen (shown above, at middle) formation, and is chosen since it is not symmetric left-right or up-down. -

Department of Physics United States Naval Academy Lecture 36: Spherical Refracting Surfaces & Thin Lenses
Department of Physics United States Naval Academy Lecture 36: Spherical Refracting Surfaces & Thin Lenses Spherical Refracting Surfaces: A single spherical surface that refracts light can form an image. The object distance p, the image distance i, and the radius of curvature r of the surface are related by n n n − n 1 + 2 = 2 1 p i r where n1 is the index of refraction of the material where the object is located and n2 is the index of refraction on the other side of the surface. Sign Convention for refracting surfaces: When the object faces a convex refracting surface, the radius of curvature r is positive. When it faces a con- cave surface, r is negative. Be careful: This is just the reverse of the sign convention for mirrors. Thus, for refracting surfaces, real images form on the side of a refracting surface that is opposite the object [Fig (a) and (b)], and virtual images form on the same side as the object [Fig (c) - (f)]. Thin Lenses: A lens is a transparent object with two refracting surfaces whose central axes coincide. In this section, we will consider two types of lenses: a lens that causes light rays initially parallel to the central axis to converge is called a converging lens (or convex lens). If, instead, it causes such rays to diverge, the lens is a diverging lens (or concave lens). A converging or convex lens can form a real image (if the object is outside the focal point) or a virtual image (if the object is inside the focal point). -

Geometric Optics
GEOMETRIC OPTICS I. What is GEOMTERIC OPTICS In geometric optics, LIGHT is treated as imaginary rays. How these rays interact with at the interface of different media, including lenses and mirrors, is analyzed. LENSES refract light, so we need to know how light bends when entering and exiting a lens and how that interaction forms an image. MIRRORS reflect light, so we need to know how light bounces off of surfaces and how that interaction forms an image. II. Refraction We already learned that waves passing from one media to another cause light to do two things: Change path Change wavelength which means…Change velocity (speed of light) The velocity DECREASES and the wavelength SHORTENS when light passes from a “faster” to a “slower” media. The velocity INCREASES and the wavelength LENGTHENS when light passes from a “slower” to a “faster” media. In either case, the FREQUENCY remains the same. 1 refraction, continued When light hits the interface of two media at an angle, the lower part of the ray interacts first, thus slowing it down before the rest of the ray meets the interface. This rotates the ray toward the normal. The NORMAL LINE is an imaginary line PERPENDICULAR to the interface of two media. The REFRACTIVE INDEX of a substance tells you how much light will change speed (or bend) when it passes through the substance. It is the ratio of the speed of light in the medium to the speed of light in a vacuum. The medium will commonly n is the refractive index be air, water, glass, plastic c is the speed of light in a vacuum 2 refraction, continued substance refractive index, n vacuum 1 air 1.000277 water 1.333 glass 1.50 The table of refractive index values shows you that light slows down only a little in air, but its speed is reduced about 33% in glass. -

Image Formation Types of Images
Image formation A. Karle Physics 202 Nov. 27, 2007 Chapter 36 • Mirrors • Images • Ray diagrams • Lenses As usual, these notes are only a complement to the notes on the whiteboard. Types of Images • A real image is formed when light rays pass through and diverge from the image point – Real images can be displayed on screens • A virtual image is formed when light rays do not pass through the image point but only appear to diverge from that point – Virtual images cannot be displayed on screens 1 Images Formed by Flat Mirrors • Simplest possible mirror • Light rays leave the source and are reflected from the mirror • Point I is called the image of the object at point O • The image is virtual Images Formed by Flat Mirrors Definitions: • The object distance Flat mirror: – Denoted by p • -|p|=|q| • The image distance – Denoted by q • M = 1 • The lateral magnification •The image is virtual – Denoted by M=h’/h •The image is upright 2 Application – Day and Night Settings on Auto Mirrors • With the daytime setting, the bright beam of reflected light is directed into the driver’s eyes • With the nighttime setting, the dim beam of reflected light is directed into the driver’s eyes, while the bright beam goes elsewhere Spherical mirrors: Concave Mirror Notation • Radius of curvature: R • Center of curvature: C • A line drawn from C to V: principal axis of the mirror 3 Spherical Aberration • Rays that are far from the principal axis converge to other points on the principal axis • This produces a blurred image • The effect is called spherical aberration Image Formed by a Concave Mirror Geometrical analysis shows: 1. -

Mid-Victorian Fiction and Moving-Image Technologies
Durham E-Theses The Eye in Motion: Mid-Victorian Fiction and Moving-Image Technologies BUSH, NICOLE,SAMANTHA How to cite: BUSH, NICOLE,SAMANTHA (2015) The Eye in Motion: Mid-Victorian Fiction and Moving-Image Technologies , Durham theses, Durham University. Available at Durham E-Theses Online: http://etheses.dur.ac.uk/11124/ Use policy The full-text may be used and/or reproduced, and given to third parties in any format or medium, without prior permission or charge, for personal research or study, educational, or not-for-prot purposes provided that: • a full bibliographic reference is made to the original source • a link is made to the metadata record in Durham E-Theses • the full-text is not changed in any way The full-text must not be sold in any format or medium without the formal permission of the copyright holders. Please consult the full Durham E-Theses policy for further details. Academic Support Oce, Durham University, University Oce, Old Elvet, Durham DH1 3HP e-mail: [email protected] Tel: +44 0191 334 6107 http://etheses.dur.ac.uk 2 The Eye in Motion: Mid-Victorian Fiction and Moving-Image Technologies Nicole Bush Submitted in accordance with the requirements for the degree of Doctor of Philosophy Department of English Studies Durham University January 2015 Abstract This thesis reads selected works of fiction by three mid-Victorian writers (Charlotte Brontë, Charles Dickens, and George Eliot) alongside contemporaneous innovations and developments in moving-image technologies, or what have been referred to by historians of film as ‘pre-cinematic devices’. -
Reflection Angle of Incidence = Angle of Reflection
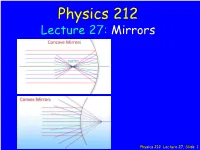
Physics 212 Lecture 27: Mirrors Physics 212 Lecture 27, Slide 1 Music Who is the Artist? A) Soul Rebels Brass Band B) John Boutte C) New Orleans Nightcrawlers D) Paul Sanchez & Shammar Allen E) Alex McMurray and Matt Perrine Why? Threadhead Records Beats Shazam !! Fan-funded and volunteer run record company Wonderful music from New Orleans Hint: Thursday’s artists also did a great set at Lagniappe stage last Jazzfest Physics 212 Lecture 27 Your Comments “Since the extended rays intersect behind the convex mirror, where there is no light, is the image How can you have a real image with a mirror? It always looks like we're looking at something behind the mirror. I don't understand how a mirror can produce a real image. produced virtual or real? wouldn't the image just be magnified? I'm so confused.” We will Do Examples “When are images real and when are they inverted in Clarify Sign Conventions mirrors?” Orientation of images “Not too bad. Just a recap of all the sign conventions Note How Similar This including lenses would be nice” Lecture is to the Lenses Lecture !! “How can you have a real image with a mirror? It always Does a virtual image also show that the image is upright? And vice versa, does a real image also show that the image is inverted? looks like we're looking at something behind the mirror. I don't understand how a mirror can produce a real image.” Go over drawing the lines for convex mirrors again “Go over drawing the lines for convex mirrors again” Even better – the calculation Is there an easy way to memorize what is a concave lens/mirror and what is a convex lens/mirror? “When you look at a shiny spoon, you can see yourself upside down on the concave part, and right side up on the convex part. -

Glossary: Unit I
APS.SE.Backmatter 9/1/04 10:46 AM Page 833 Glossary Glossary: Unit I Chapters 1–9 center of mass: the point at which all the mass of an object is considered to be Active Physics concentrated for calculations concerning motion of the object. acceleration: the change in velocity per unit time. centripetal acceleration: the inward radial ⌬v acceleration of an object moving at a a ϭ ᎏ ⌬t constant speed in a circle. air resistance: a force by the air on a moving v2 a ϭ ᎏ object; the force is dependent on the speed, R volume, and mass of the object as well as on centripetal force: a force directed towards the properties of the air, like density. the center that causes an object to follow a alternating current: an electric current that circular path. reverses in direction. mv2 F ϭ ᎏᎏᎏ R amplitude: the maximum displacement of a closed system: a physical system on which particle as a wave passes; the height of a no outside influences act; closed so that wave crest; it is related to a wave’s energy. nothing gets in or out of the system and ampere: the SI unit for electric current; one nothing from outside can influence the ampere (1 A) is the flow of one coulomb of system’s observable behavior or properties. charge every second. concave lens: a lens that causes parallel light analog: a description of a continuously rays to diverge; a lens that is thicker at its variable signal or a circuit; an analog signal edges than in the center. -

Optics Start with a Point Source of Light
Optics Start with a point source of light Photographic plate object We do not get a sharp picture of the source; we just get a diffuse blur The lens Rays get bent downwards object image Outer rays bend more Middle ray goes straight through If we arrange the shape of the lens just right, the rays will focus to a point Question: If we make the lens so that an object at A focuses, then will objects at B, C, ... focus somewhere as well? B C A A' Answer: No, they will not ... at best we can manage a good approximation .... The approximation (a) The lens in thin compared to the distances of the object and image small (b) The objects are small compared to the curvature radius of the lens surfaces curvature radius of lens surface small All the concerned rays have angles to the horizontal that are small Why do the rays bend ? sin ✓1 n2 Snell's law = sin ✓2 n1 n1 ✓1 The ray bends closer to the normal when it enters a denser medium n2 ✓2 n1 ✓1 The path of light rays is n always reversible 2 ✓2 The ray bends away from the normal when it enters a rarer medium GR9677 38 GR9677 sin ✓ 1 = sin 90o 1.33 n1 =1 sin ✓ 0.75 ⇡ n2 =1.33 ✓ 38 98. Suppose that a system in quantum state i has energy Ei . In thermal equilibrium, the expression -EkTi / Â Eei i -EkT/ Â e i i represents which of the following? (A) The average energy of the system (B) The partition function (C) Unity (D) The probability to find the system with 97.