Efficient Incorporation of Channel Cross- Section Geometry Uncertainty Into Regional and Global Scale Flood Inundation Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Croome Collection Coventry Family History
Records Service Croome Collection Coventry Family History George William Coventry, Viscount Deerhurst and 9th Earl of Coventry Born 1838, the first son of George William (Viscount Deerhurst) and his wife Harriet Anne Cockerell. After the death of their parents, George William and his sister, Maria Emma Catherine (who later married Gerald Henry Brabazon Ponsonby), were brought up at Seizincote, but they visited Croome regularly. He succeeded as Earl in 1843, aged only 5 years old. During his minority his great-uncle William James (fifth son of the 7th Earl and his wife 'Peggy') took responsibility for the estate, with assistance from his guardians and trustees: Richard Temple of the Nash, Kempsey, Worcestershire and his grandfather, Sir Charles Cockerell. When the 9th Earl came of age at 21 he let William James and his wife Mary live at Earls Croome Court rent- free for the rest of their lives. George William married Lady Blanche Craven (1842-1930), the third daughter of William Craven, 2nd Earl Craven of Combe Abbey, Warwickshire. Together they had five sons: George William, Charles John, Henry Thomas, Reginald William and Thomas George, and three daughters: Barbara Elizabeth, Dorothy and Anne Blanche Alice. In 1859 George William was elected as president of the Marylebone Cricket Club (MCC). In 1868 he was invited to be the first Master of the new North Cotswold Hunt when the Cotswold Hunt split. He became a Privy Councillor in 1877 and served as Captain and Gold Stick of the Corps of Gentleman-at-Arms from 1877-80. George William served as Chairman of the County Quarter Sessions from 1880-88. -

Tewkesbury Borough Housing Monitoring Report
Tewkesbury Borough Housing Monitoring Report 2018/19 AUGUST 2019 Tewkesbury Borough Council Planning Policy Tewkesbury Borough Council Council Offices Gloucester Road Tewkesbury Gloucestershire GL20 5TT www.tewkesbury.gov.uk 1 TABLE OF CONTENTS TABLE OF CONTENTS ........................................................................................................................................... 2 LIST OF TABLES .................................................................................................................................................... 3 EXECUTIVE SUMMARY ........................................................................................................................................ 4 INTRODUCTION ................................................................................................................................................... 5 What is the Housing Monitoring Report? ...................................................................................................... 5 Adopted Plan Context ..................................................................................................................................... 5 Joint Core Strategy ...................................................................................................................................... 5 Tewkesbury Borough Plan to 2011 .............................................................................................................. 6 Emerging Planning Policy – Tewkesbury Borough Plan .............................................................................. -

Deerhurst and Apperley Church of England Primary School Inspection Report
Deerhurst and Apperley Church of England Primary School Inspection report Unique Reference Number 115619 Local Authority Gloucestershire Inspection number 312002 Inspection date 9 October 2007 Reporting inspector Christine Huard This inspection of the school was carried out under section 5 of the Education Act 2005. Type of school Primary School category Voluntary controlled Age range of pupils 411 Gender of pupils Mixed Number on roll School 62 Appropriate authority The governing body Chair Cate morris Headteacher Pauline Mcevoy Date of previous school inspection 9 June 2003 School address Apperley Gloucester GL19 4DQ Telephone number 01452 780374 Fax number 01452 780374 Age group 4-11 Inspection date 9 October 2007 Inspection number 312002 Inspection Report: Deerhurst and Apperley Church of England Primary School, 9 October 2007 . © Crown copyright 2007 Website: www.ofsted.gov.uk This document may be reproduced in whole or in part for non-commercial educational purposes, provided that the information quoted is reproduced without adaptation and the source and date of publication are stated. Further copies of this report are obtainable from the school. Under the Education Act 2005, the school must provide a copy of this report free of charge to certain categories of people. A charge not exceeding the full cost of reproduction may be made for any other copies supplied. Inspection Report: Deerhurst and Apperley Church of England Primary School, 9 October 2007 3 of 11 Introduction The inspection was carried out by two Additional Inspectors. Description of the school This is a small school serving the two villages and the surrounding area. Nearly all pupils are of White British descent and none are at an early stage of learning English. -
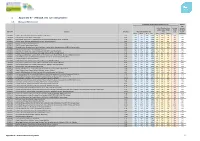
JBA Consulting Report Template 2015
1 Appendix B – SHELAA site screening tables 1.1 Malvern Hills District Proportion of site shown to be at risk (%) Area of site Risk of flooding from Historic outside surface water (Total flood of Flood Site code Location Area (ha) Flood Zones (Total %s) %s) map Zones FZ 3b FZ 3a FZ 2 FZ 1 30yr 100yr 1,000yr (hectares) CFS0006 Land to the south of dwelling at 155 Wells road Malvern 0.21 0% 0% 0% 100% 0% 0% 6% 0% 0.21 CFS0009 Land off A4103 Leigh Sinton Leigh Sinton 8.64 0% 0% 0% 100% 0% <1% 4% 0% 8.64 CFS0011 The Arceage, View Farm, 11 Malvern Road, Powick, Worcestershire, WR22 4SF Powick 1.79 0% 0% 0% 100% 0% 0% 0% 0% 1.79 CFS0012 Land off Upper Welland Road and Assarts Lane, Malvern Malvern 1.63 0% 0% 0% 100% 0% 0% 0% 0% 1.63 CFS0016 Watery Lane Upper Welland Welland 0.68 0% 0% 0% 100% 4% 8% 26% 0% 0.68 CFS0017 SO8242 Hanley Castle Hanley Castle 0.95 0% 0% 0% 100% 2% 2% 13% 0% 0.95 CFS0029 Midlands Farm, (Meadow Farm Park) Hook Bank, Hanley Castle, Worcestershire, WR8 0AZ Hanley Castle 1.40 0% 0% 0% 100% 1% 2% 16% 0% 1.40 CFS0042 Hope Lane, Clifton upon Teme Clifton upon Teme 3.09 0% 0% 0% 100% 0% 0% 0% 0% 3.09 CFS0045 Glen Rise, 32 Hallow Lane, Lower Broadheath WR2 6QL Lower Broadheath 0.53 0% 0% 0% 100% <1% <1% 1% 0% 0.53 CFS0052 Land to the south west of Elmhurst Farm, Leigh Sinton, WR13 5EA Leigh Sinton 4.39 0% 0% 0% 100% 0% 0% 0% 0% 4.39 CFS0060 Land Registry. -

Severn River Basin District Flood Risk Management Plan 2015-2021
Severn River Basin District Flood Risk Management Plan 2015-2021 PART B - Sub Areas in the Severn River Basin District December 2015 Published by: Environment Agency Natural Resources Wales Horizon house, Deanery Road, Cambria house, 29 Newport Road, Bristol BS1 5AH Cardiff CF24 0TP Email: [email protected] Email: [email protected] www.gov.uk/environment-agency http://www.naturalresourceswales.gov.uk Further copies of this report are available Further copies of this report are available from our publications catalogue: from our website: www.gov.uk/government/publications http://www.naturalresourceswales.gov.uk or our National Customer Contact Centre: or our Customer Contact Centre: T: 03708 506506 T: 0300 065 3000 (Mon-Fri, 8am - 6pm) Email: [email protected]. Email: [email protected] © Environment Agency 2015 © Natural Resources Wales All rights reserved. This document may be All rights reserved. This document may be reproduced with prior permission of the reproduced with prior permission of Natural Environment Agency. Resources Wales. ii Contents Contents ............................................................................................................................. iii Glossary and Abbreviations ................................................................................................ iv 1. The layout of this document .......................................................................................... 1 2. Sub-areas in the Severn River -

Map and List of Gloucestershire Parishes
Gloucestershire Parishes Hundred boundaries are occasionally inaccurate and detached parts of parishes cannot be shown for reasons of scale. List of Gloucestershire Parishes This is a list of all the Church of England parishes in the Diocese of Gloucester, in alphabetical order. It gives the reference number of the parish records held by Gloucestershire Archives. Some parishes at the edges of the county are in other dioceses and their parish records are not held by Gloucestershire Archives. For example, several parishes in South Gloucestershire are in the Diocese of Bristol and their records are held at Bristol Record Office. Ref Parish name Ref Parish name P1 Abenhall P27 Aston-sub-Edge P4 Acton Turville P29 Avening P5 Adlestrop P30 Awre P6 Alderley P384 Aylburton P7 Alderton P31 Badgeworth P8 Aldsworth P33 Bagendon P12 Alvington P34 Barnsley P13 Amberley P35 Barnwood P15 Ampney Crucis P38 Batsford P16 Ampney St Mary P39 Baunton P17 Ampney St Peter P40 Beachley P383 Andoversford P41 Beckford (Worcestershire) P18 Arlingham P42 Berkeley P19 Ashchurch P43 Beverstone P20 Ashleworth P44 Bibury P21 Ashley P45 Birdlip P24 Aston Blank alias Cold Aston P46 Bishops Cleeve P25 Aston Magna P46/2 Bishops Cleeve, St Peter, P26 Aston Somerville Cleeve Hill P47 Bisley Ref Parish name Ref Parish name P49 Blaisdon P78/3 Cheltenham, Christ Church P50 Blakeney P78/13 Cheltenham, Church of the P51 Bledington Emmanuel P52 Blockley P78/4 Cheltenham, Holy Trinity P53 Boddington P78/15 Cheltenham, St Aidan P54 Bourton-on-the-Hill P78/16 Cheltenham, St Barnabas -

Land at Deerhurst, Tewkesbury, Gloucestershire
www.cpwdaniell.co.uk Land at Deerhurst, Tewkesbury, Gloucestershire Approximately 42.15 acres (17.06 hectares) of versatile agricultural land with excellent access off the A38 and B4213. Located to the south of Tewkesbury and available as a whole or in two lots. For sale by Informal Tender with best and final offers invited by no later than Midday on Friday 20th August 2021. Guide Price: £380,000 CPW Daniell Ltd is a company registered in England and Wales. Registration Number 8176043. Registered Office: Green Farm, Queenhill, Upton-upon-Severn, Worcestershire WR8 0RD. This company is regulated by RICS. LAND AGENTS CHARTERED SURVEYORS PROPERTY CONSULTANTS Land at Deerhurst, Tewkesbury, Gloucestershire LOCATION mains running along the A38 and B4213 and purchas- The property is located in the parish of Deerhurst, ap- ers are advised to make enquiries of Severn Trent Wa- proximately 2.3 miles to the south of Tewkesbury off the ter with regard to making their own connection. A38 Gloucester Road. DEVELOPMENT UPLIFT The village of Tredington is approximately 1 mile to the The land will be sold subject to an uplift clause of 50% east and the village of Apperley is approximately 2 for 30 years should planning permission be achieved for miles to the west. Gloucester is approximately 9 miles to an alternative use. Agricultural and Equestrian develop- the south. ment will be permitted. DESCRIPTION METHOD OF SALE The property consists of two fields totaling 42.15 acres The property will be sold as a whole or in two lots via (17.06 hectares) of versatile agricultural land. -

National Rivers Authority National Water Resources
Howard Humphreys Consulting Engineers in Association with Cobham Resource Consultants NATIONAL RIVERS A U TH O R ITY NATIONAL WATER RESOURCES STRATEGY: COMPARATIVE ENVIRONMENTAL APPRAISAL OF STRATEGIC OPTIONS Volume 1: Main Report Ref. 84.247.0/AW/3122/NRAEA1.R02 Howard Humphreys & Partners Ltd f .Thorncroft' '■•TX. • Manor* ■. v ,1 Dorking Road > Leatherhead Surrey KT22 8JB January 1994 WJtmw Brown & Root Civil National Rivers Authority Guildbourne House Worthing Please return this book on or before last date shown below. Renewals can be obtained by contacting the library. E n v i r o n m e n t A g e n c y NATIONAL LIBRARY & INFORMATION SERVICE SOUTHERN REGION Guildbourne House, Chatsworth Road. Worthing. West Sussex BN 1 1 1LD Howard Humphreys Consulting Engineers in Association with Cob ham Resource Consultants NATIONAL RIVERS AUTHORITY NATIONAL WATER RESOURCES STRATEGY: COMPARATIVE ENVIRONMENTAL APPRAISAL OF STRATEGIC OPTIONS Volume 1: Main Report Ref. 84.247.0/AW/3122/NRAEA1.R02 Howard Humphreys & Partners Ltd Thomcroft Manor Dorking Road Leatherhead Surrey KT22 8JB January 1994 NATIONAL RIVERS AUTHORITY NATIONAL WATER RESOURCES STRATEGY COMPARATIVE ENVIRONMENTAL APPRAISAL OF STRATEGIC OPTIONS FINAL REPORT VOLUME 1 - MAIN REPORT CONTENTS EXECUTIVE SUMMARY 1. INTRODUCTION 1 1.1 Background 1 1.2 Objectives and Tasks 2 1.3 Scope of Study 2 1.4 Limitations of Study 3 1.5 Scope of Report 3 2. IDENTIFICATION OF STRATEGIC OPTIONS 5 2.1 Selection of Strategic Options 5 2.2 Strategic Options 6 3. LITERATURE REVIEW AND UK EXPERIENCE 7 3-1 Key Findings from Literature Review 7 3.2 Key Findings From UK Experience 9 3.3 NRA Consultation Workshops 11 3-4 Key Issues 11 4. -

Near-Real-Time Assimilation of SAR-Derived Flood Maps for Improving Flood Forecasts
Hostache, R., Chini, M., Giustarini, L., Neal, J., Kavetski, D., Wood, M., ... Matgen, P. (2018). Near-Real-Time Assimilation of SAR-Derived Flood Maps for Improving Flood Forecasts. Water Resources Research, 54(8), 5516-5535. https://doi.org/10.1029/2017WR022205 Publisher's PDF, also known as Version of record License (if available): CC BY Link to published version (if available): 10.1029/2017WR022205 Link to publication record in Explore Bristol Research PDF-document This is the final published version of the article (version of record). It first appeared online via AGU at https://agupubs.onlinelibrary.wiley.com/doi/full/10.1029/2017WR022205 . Please refer to any applicable terms of use of the publisher. University of Bristol - Explore Bristol Research General rights This document is made available in accordance with publisher policies. Please cite only the published version using the reference above. Full terms of use are available: http://www.bristol.ac.uk/pure/about/ebr-terms Water Resources Research RESEARCH ARTICLE Near-Real-Time Assimilation of SAR-Derived Flood Maps 10.1029/2017WR022205 for Improving Flood Forecasts Key Points: • Probabilistic flood maps are derived Renaud Hostache1 , Marco Chini1, Laura Giustarini1, Jeffrey Neal2 , Dmitri Kavetski3 , from SAR images Melissa Wood1,2,4, Giovanni Corato1, Ramona-Maria Pelich1, and Patrick Matgen1 • Probabilistic flood maps are assimilated into a flood forecasting 1 model cascade Department of Environmental Research and Innovation, Luxembourg Institute of Science and Technology, Esch sur • Water level forecast quality improves Alzette, Luxembourg, 2School of Geographical Sciences, University of Bristol, Bristol, UK, 3School of Civil, Environmental substantially in the assimilation time and Mining Engineering, University of Adelaide, Adelaide, South Australia, Australia, 4Faculty of Geosciences, Utrecht steps, and benefits persist for hours University, Utrecht, Netherlands to days Correspondence to: Abstract Short- to medium-range flood forecasts are central to predicting and mitigating the impact R. -

Severn Preliminary Flood Risk Assessment December 2018
Severn preliminary flood risk assessment December 2018 The Environment Agency in England and Natural Resources Wales have worked together to produce this report. We work together to manage flooding on the River Severn and its tributaries. The cover photo shows how important this is. This is an area in Wales where the River Vyrnwy joins the River Severn. Historically, river embankments (known locally as ‘argaes’) were built to stop farmland from flooding. In large flood events, these overtop from the river at different times and floodwater gets stored on the floodplain. This helps to reduce the impact of river flooding downstream in England in towns like Shrewsbury and Ironbridge. Photo credit: Richard Becker / Alamy Stock Photo About the Environment Agency We are the Environment Agency. We protect and improve the environment. We help people and wildlife adapt to climate change and reduce its impacts, including flooding, drought, sea level rise and coastal erosion. We improve the quality of our water, land and air by tackling pollution. We work with businesses to help them comply with environmental regulations. A healthy and diverse environment enhances people's lives and contributes to economic growth. We can’t do this alone. We work as part of the Defra group (Department for Environment, Food & Rural Affairs), with the rest of government, local councils, businesses, civil society groups and local communities to create a better place for people and wildlife. Published by: Environment Agency Horizon House, Deanery Road, Bristol BS1 5AH -

Monument Types (Forms)
CHAPTER V MONUMENT TYPES (FORMS) EARLY ‘BRitisH’ CARVED stONES fecit is in Latin and this, together with the similarity of some of the letter-forms, might indicate that the St In the Corpus volume for the South-West of England, Briavels 1 stone is an early medieval memorial similar Rosemary Cramp was confronted with a problem not to stones found in south-east Wales. The inscription previously encountered in the Corpus — early stone cannot, however, be dated more closely than fifth to carving that belonged to the ‘British’ tradition rather ninth century. than the Anglo-Saxon but that lay within the confines of the study area (Cramp 2006). The western fringes of the area covered by the present volume also contain GRAVE-MARKERS AND GRAVE-COVERS a scatter of ‘British’ stones, some of which have been recorded in the Welsh carved stone corpus for South- The earliest Anglo-Saxon grave-covers and grave- East Wales and the English Border (Redknap and markers begin to appear with the sudden explosion of Lewis 2007). stone carving that occurs across much of the area, and The earliest, the Cunorix Stone from Wroxeter particularly in Gloucestershire, in the late eighth and (Wroxeter Roman Town 1, Shropshire) is a reused early ninth centuries. This corresponds to the second Roman carved stone which carries an inscription that half of the reign of Offa and the reign ofC oenwulf, and has been dated to the fifth/sixth century (p. 318, Ill. was a time of continuing Mercian political supremacy 571). A second slab, of sandstone, which bore a sixth- which presumably led to increased wealth. -

WORCESTERSHIRE. [KELLY's Davenport Rev
272 DAV WORCESTERSHIRE. [KELLY'S Davenport Rev. E. Tontine bldgs.Strprt Da"Wson William Henry, I Union villas, Dimoline Artbur Charles, 8 Green hill, DavenportH.Stationvii.Finstall,Brmsgro Queen street, Stonrbridge London road, Worcester Davenport Miss, Field view, Victoria Dawson William Henry M. D. St. Helens, Dineley Mrs. 5 Holly terrace, Lansdowne road, Malvern Link . ChurC'h street, Great Malvern road, Worcester Davey Rev. Austin o.s.B. Stanbrook, Day Rev. Archibald :M.A., J.P. 'rhe Dingle Francis, The Chestnuts, Wells Powick, Worcester Vicarage, Church road, Malvern Link road, Great Malvern Davey Rev. Henry, St. Peter's presby- DayErnest, I4St.George'ssq.Worcester Dingle Francis D.L., Thames house, tery, Worcester road, Bromsg-rove DayHarry,Waverley vil.Batb rd. Worcstr Barbourne road, Worcester DaveyA.L.Spring Tale,Hagley,Strbrdge DayJ.C.R.Lit.Perdisweli,Claines, Wrcstr Dipple Alfred, Charford lodge, Worcester Davey Harry, Thornville, Stephenson Day Misses, IO Strand, Bromsgrove road, Bromsgrove terrace, Worcester Day Mrs. Lynwood, St. Duns tan's cres- Disano Very Rev. Raymund, St. Saviour'• Davidson William John, Oak field, Fern- cent, Green hill, London rd. Worcester retreat, Broadway hill heath, North Claines, Worcester DayMrs.Ravenhillho.Lulsley,Worcester Disney 'fhos. M.A. School ho. Halesowen Davies Major-Gen. Henry Fanshawe DayW.H.Holly ldg.Dodford,Bromsgrove Dix Mrs. Sansterre, Holly green, Severn J.r.Elmleypk. Elmley castle,Pershore Dayrell Miss, Nash's farm, Little Corn- Stoke, Worcester Davies Rev. 'f. B. .!.. Bredon,Tewkesbury berton, Pershore Dixey Harry Edward M.D., C.M. Wood- navies E.II.Elderslie,London rd. Wrcstr Deacon William, Mount Vernon, St. gate, Albert road, Great Malvern Davies E.