Section 6: Magnetostatics Magnetic Fields in Matter in the Previous Sections We Assumed That the Current Density J Is a Known Function of Coordinates
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Basic Magnetic Measurement Methods
Basic magnetic measurement methods Magnetic measurements in nanoelectronics 1. Vibrating sample magnetometry and related methods 2. Magnetooptical methods 3. Other methods Introduction Magnetization is a quantity of interest in many measurements involving spintronic materials ● Biot-Savart law (1820) (Jean-Baptiste Biot (1774-1862), Félix Savart (1791-1841)) Magnetic field (the proper name is magnetic flux density [1]*) of a current carrying piece of conductor is given by: μ 0 I dl̂ ×⃗r − − ⃗ 7 1 - vacuum permeability d B= μ 0=4 π10 Hm 4 π ∣⃗r∣3 ● The unit of the magnetic flux density, Tesla (1 T=1 Wb/m2), as a derive unit of Si must be based on some measurement (force, magnetic resonance) *the alternative name is magnetic induction Introduction Magnetization is a quantity of interest in many measurements involving spintronic materials ● Biot-Savart law (1820) (Jean-Baptiste Biot (1774-1862), Félix Savart (1791-1841)) Magnetic field (the proper name is magnetic flux density [1]*) of a current carrying piece of conductor is given by: μ 0 I dl̂ ×⃗r − − ⃗ 7 1 - vacuum permeability d B= μ 0=4 π10 Hm 4 π ∣⃗r∣3 ● The Physikalisch-Technische Bundesanstalt (German national metrology institute) maintains a unit Tesla in form of coils with coil constant k (ratio of the magnetic flux density to the coil current) determined based on NMR measurements graphics from: http://www.ptb.de/cms/fileadmin/internet/fachabteilungen/abteilung_2/2.5_halbleiterphysik_und_magnetismus/2.51/realization.pdf *the alternative name is magnetic induction Introduction It -

Electrostatics Vs Magnetostatics Electrostatics Magnetostatics
Electrostatics vs Magnetostatics Electrostatics Magnetostatics Stationary charges ⇒ Constant Electric Field Steady currents ⇒ Constant Magnetic Field Coulomb’s Law Biot-Savart’s Law 1 ̂ ̂ 4 4 (Inverse Square Law) (Inverse Square Law) Electric field is the negative gradient of the Magnetic field is the curl of magnetic vector electric scalar potential. potential. 1 ′ ′ ′ ′ 4 |′| 4 |′| Electric Scalar Potential Magnetic Vector Potential Three Poisson’s equations for solving Poisson’s equation for solving electric scalar magnetic vector potential potential. Discrete 2 Physical Dipole ′′′ Continuous Magnetic Dipole Moment Electric Dipole Moment 1 1 1 3 ∙̂̂ 3 ∙̂̂ 4 4 Electric field cause by an electric dipole Magnetic field cause by a magnetic dipole Torque on an electric dipole Torque on a magnetic dipole ∙ ∙ Electric force on an electric dipole Magnetic force on a magnetic dipole ∙ ∙ Electric Potential Energy Magnetic Potential Energy of an electric dipole of a magnetic dipole Electric Dipole Moment per unit volume Magnetic Dipole Moment per unit volume (Polarisation) (Magnetisation) ∙ Volume Bound Charge Density Volume Bound Current Density ∙ Surface Bound Charge Density Surface Bound Current Density Volume Charge Density Volume Current Density Net , Free , Bound Net , Free , Bound Volume Charge Volume Current Net , Free , Bound Net ,Free , Bound 1 = Electric field = Magnetic field = Electric Displacement = Auxiliary -

Chapter 2 Introduction to Electrostatics
Chapter 2 Introduction to electrostatics 2.1 Coulomb and Gauss’ Laws We will restrict our discussion to the case of static electric and magnetic fields in a homogeneous, isotropic medium. In this case the electric field satisfies the two equations, Eq. 1.59a with a time independent charge density and Eq. 1.77 with a time independent magnetic flux density, D (r)= ρ (r) , (1.59a) ∇ · 0 E (r)=0. (1.77) ∇ × Because we are working with static fields in a homogeneous, isotropic medium the constituent equation is D (r)=εE (r) . (1.78) Note : D is sometimes written : (1.78b) D = ²oE + P .... SI units D = E +4πP in Gaussian units in these cases ε = [1+4πP/E] Gaussian The solution of Eq. 1.59 is 1 ρ0 (r0)(r r0) 3 D (r)= − d r0 + D0 (r) , SI units (1.79) 4π r r 3 ZZZ | − 0| with D0 (r)=0 ∇ · If we are seeking the contribution of the charge density, ρ0 (r) , to the electric displacement vector then D0 (r)=0. The given charge density generates the electric field 1 ρ0 (r0)(r r0) 3 E (r)= − d r0 SI units (1.80) 4πε r r 3 ZZZ | − 0| 18 Section 2.2 The electric or scalar potential 2.2 TheelectricorscalarpotentialFaraday’s law with static fields, Eq. 1.77, is automatically satisfied by any electric field E(r) which is given by E (r)= φ (r) (1.81) −∇ The function φ (r) is the scalar potential for the electric field. It is also possible to obtain the difference in the values of the scalar potential at two points by integrating the tangent component of the electric field along any path connecting the two points E (r) d` = φ (r) d` (1.82) − path · path ∇ · ra rb ra rb Z → Z → ∂φ(r) ∂φ(r) ∂φ(r) = dx + dy + dz path ∂x ∂y ∂z ra rb Z → · ¸ = dφ (r)=φ (rb) φ (ra) path − ra rb Z → The result obtained in Eq. -

The Magnetic Moment of a Bar Magnet and the Horizontal Component of the Earth’S Magnetic Field
260 16-1 EXPERIMENT 16 THE MAGNETIC MOMENT OF A BAR MAGNET AND THE HORIZONTAL COMPONENT OF THE EARTH’S MAGNETIC FIELD I. THEORY The purpose of this experiment is to measure the magnetic moment μ of a bar magnet and the horizontal component BE of the earth's magnetic field. Since there are two unknown quantities, μ and BE, we need two independent equations containing the two unknowns. We will carry out two separate procedures: The first procedure will yield the ratio of the two unknowns; the second will yield the product. We will then solve the two equations simultaneously. The pole strength of a bar magnet may be determined by measuring the force F exerted on one pole of the magnet by an external magnetic field B0. The pole strength is then defined by p = F/B0 Note the similarity between this equation and q = F/E for electric charges. In Experiment 3 we learned that the magnitude of the magnetic field, B, due to a single magnetic pole varies as the inverse square of the distance from the pole. k′ p B = r 2 in which k' is defined to be 10-7 N/A2. Consider a bar magnet with poles a distance 2x apart. Consider also a point P, located a distance r from the center of the magnet, along a straight line which passes from the center of the magnet through the North pole. Assume that r is much larger than x. The resultant magnetic field Bm at P due to the magnet is the vector sum of a field BN directed away from the North pole, and a field BS directed toward the South pole. -

Magnetic Polarizability of a Short Right Circular Conducting Cylinder 1
Journal of Research of the National Bureau of Standards-B. Mathematics and Mathematical Physics Vol. 64B, No.4, October- December 1960 Magnetic Polarizability of a Short Right Circular Conducting Cylinder 1 T. T. Taylor 2 (August 1, 1960) The magnetic polarizability tensor of a short righ t circular conducting cylinder is calcu lated in the principal axes system wit h a un iform quasi-static but nonpenetrating a pplied fi eld. On e of the two distinct tensor components is derived from res ults alread y obtained in co nnection wi th the electric polarizabili ty of short conducting cylinders. The other is calcu lated to an accuracy of four to five significan t fi gures for cylinders with radius to half-length ratios of }~, }~, 1, 2, a nd 4. These results, when combin ed with t he corresponding results for the electric polari zability, are a pplicable to t he proble m of calculating scattering from cylin cl ers and to the des ign of artifi c;al dispersive media. 1. Introduction This ar ticle considers the problem of finding the mftgnetie polariz ability tensor {3ij of a short, that is, noninfinite in length, righ t circular conducting cylinder under the assumption of negli gible field penetration. The latter condition can be realized easily with avail able con ductin g materials and fi elds which, although time varying, have wavelengths long compared with cylinder dimensions and can therefore be regftrded as quasi-static. T he approach of the present ar ticle is parallel to that employed earlier [1] 3 by the author fo r fin ding the electric polarizability of shor t co nductin g cylinders. -

PH585: Magnetic Dipoles and So Forth
PH585: Magnetic dipoles and so forth 1 Magnetic Moments Magnetic moments ~µ are analogous to dipole moments ~p in electrostatics. There are two sorts of magnetic dipoles we will consider: a dipole consisting of two magnetic charges p separated by a distance d (a true dipole), and a current loop of area A (an approximate dipole). N p d -p I S Figure 1: (left) A magnetic dipole, consisting of two magnetic charges p separated by a distance d. The dipole moment is |~µ| = pd. (right) An approximate magnetic dipole, consisting of a loop with current I and area A. The dipole moment is |~µ| = IA. In the case of two separated magnetic charges, the dipole moment is trivially calculated by comparison with an electric dipole – substitute ~µ for ~p and p for q.i In the case of the current loop, a bit more work is required to find the moment. We will come to this shortly, for now we just quote the result ~µ=IA nˆ, where nˆ is a unit vector normal to the surface of the loop. 2 An Electrostatics Refresher In order to appreciate the magnetic dipole, we should remind ourselves first how one arrives at the field for an electric dipole. Recall Maxwell’s first equation (in the absence of polarization density): ρ ∇~ · E~ = (1) r0 If we assume that the fields are static, we can also write: ∂B~ ∇~ × E~ = − (2) ∂t This means, as you discovered in your last homework, that E~ can be written as the gradient of a scalar function ϕ, the electric potential: E~ = −∇~ ϕ (3) This lets us rewrite Eq. -

Ph501 Electrodynamics Problem Set 8 Kirk T
Princeton University Ph501 Electrodynamics Problem Set 8 Kirk T. McDonald (2001) [email protected] http://physics.princeton.edu/~mcdonald/examples/ Princeton University 2001 Ph501 Set 8, Problem 1 1 1. Wire with a Linearly Rising Current A neutral wire along the z-axis carries current I that varies with time t according to ⎧ ⎪ ⎨ 0(t ≤ 0), I t ( )=⎪ (1) ⎩ αt (t>0),αis a constant. Deduce the time-dependence of the electric and magnetic fields, E and B,observedat apoint(r, θ =0,z = 0) in a cylindrical coordinate system about the wire. Use your expressions to discuss the fields in the two limiting cases that ct r and ct = r + , where c is the speed of light and r. The related, but more intricate case of a solenoid with a linearly rising current is considered in http://physics.princeton.edu/~mcdonald/examples/solenoid.pdf Princeton University 2001 Ph501 Set 8, Problem 2 2 2. Harmonic Multipole Expansion A common alternative to the multipole expansion of electromagnetic radiation given in the Notes assumes from the beginning that the motion of the charges is oscillatory with angular frequency ω. However, we still use the essence of the Hertz method wherein the current density is related to the time derivative of a polarization:1 J = p˙ . (2) The radiation fields will be deduced from the retarded vector potential, 1 [J] d 1 [p˙ ] d , A = c r Vol = c r Vol (3) which is a solution of the (Lorenz gauge) wave equation 1 ∂2A 4π ∇2A − = − J. (4) c2 ∂t2 c Suppose that the Hertz polarization vector p has oscillatory time dependence, −iωt p(x,t)=pω(x)e . -

Review of Electrostatics and Magenetostatics
Review of electrostatics and magenetostatics January 12, 2016 1 Electrostatics 1.1 Coulomb’s law and the electric field Starting from Coulomb’s law for the force produced by a charge Q at the origin on a charge q at x, qQ F (x) = 2 x^ 4π0 jxj where x^ is a unit vector pointing from Q toward q. We may generalize this to let the source charge Q be at an arbitrary postion x0 by writing the distance between the charges as jx − x0j and the unit vector from Qto q as x − x0 jx − x0j Then Coulomb’s law becomes qQ x − x0 x − x0 F (x) = 2 0 4π0 jx − xij jx − x j Define the electric field as the force per unit charge at any given position, F (x) E (x) ≡ q Q x − x0 = 3 4π0 jx − x0j We think of the electric field as existing at each point in space, so that any charge q placed at x experiences a force qE (x). Since Coulomb’s law is linear in the charges, the electric field for multiple charges is just the sum of the fields from each, n X qi x − xi E (x) = 4π 3 i=1 0 jx − xij Knowing the electric field is equivalent to knowing Coulomb’s law. To formulate the equivalent of Coulomb’s law for a continuous distribution of charge, we introduce the charge density, ρ (x). We can define this as the total charge per unit volume for a volume centered at the position x, in the limit as the volume becomes “small”. -
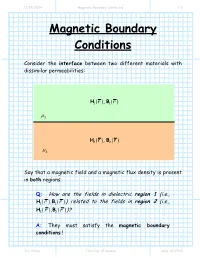
Magnetic Boundary Conditions 1/6
11/28/2004 Magnetic Boundary Conditions 1/6 Magnetic Boundary Conditions Consider the interface between two different materials with dissimilar permeabilities: HB11(r,) (r) µ1 HB22(r,) (r) µ2 Say that a magnetic field and a magnetic flux density is present in both regions. Q: How are the fields in dielectric region 1 (i.e., HB11()rr, ()) related to the fields in region 2 (i.e., HB22()rr, ())? A: They must satisfy the magnetic boundary conditions ! Jim Stiles The Univ. of Kansas Dept. of EECS 11/28/2004 Magnetic Boundary Conditions 2/6 First, let’s write the fields at the interface in terms of their normal (e.g.,Hn ()r ) and tangential (e.g.,Ht (r ) ) vector components: H r = H r + H r H1n ()r 1 ( ) 1t ( ) 1n () ˆan µ 1 H1t (r ) H2t (r ) H2n ()r H2 (r ) = H2t (r ) + H2n ()r µ 2 Our first boundary condition states that the tangential component of the magnetic field is continuous across a boundary. In other words: HH12tb(rr) = tb( ) where rb denotes to any point along the interface (e.g., material boundary). Jim Stiles The Univ. of Kansas Dept. of EECS 11/28/2004 Magnetic Boundary Conditions 3/6 The tangential component of the magnetic field on one side of the material boundary is equal to the tangential component on the other side ! We can likewise consider the magnetic flux densities on the material interface in terms of their normal and tangential components: BHrr= µ B1n ()r 111( ) ( ) ˆan µ 1 B1t (r ) B2t (r ) B2n ()r BH222(rr) = µ ( ) µ2 The second magnetic boundary condition states that the normal vector component of the magnetic flux density is continuous across the material boundary. -

The Lorentz Force
CLASSICAL CONCEPT REVIEW 14 The Lorentz Force We can find empirically that a particle with mass m and electric charge q in an elec- tric field E experiences a force FE given by FE = q E LF-1 It is apparent from Equation LF-1 that, if q is a positive charge (e.g., a proton), FE is parallel to, that is, in the direction of E and if q is a negative charge (e.g., an electron), FE is antiparallel to, that is, opposite to the direction of E (see Figure LF-1). A posi- tive charge moving parallel to E or a negative charge moving antiparallel to E is, in the absence of other forces of significance, accelerated according to Newton’s second law: q F q E m a a E LF-2 E = = 1 = m Equation LF-2 is, of course, not relativistically correct. The relativistically correct force is given by d g mu u2 -3 2 du u2 -3 2 FE = q E = = m 1 - = m 1 - a LF-3 dt c2 > dt c2 > 1 2 a b a b 3 Classically, for example, suppose a proton initially moving at v0 = 10 m s enters a region of uniform electric field of magnitude E = 500 V m antiparallel to the direction of E (see Figure LF-2a). How far does it travel before coming (instanta> - neously) to rest? From Equation LF-2 the acceleration slowing the proton> is q 1.60 * 10-19 C 500 V m a = - E = - = -4.79 * 1010 m s2 m 1.67 * 10-27 kg 1 2 1 > 2 E > The distance Dx traveled by the proton until it comes to rest with vf 0 is given by FE • –q +q • FE 2 2 3 2 vf - v0 0 - 10 m s Dx = = 2a 2 4.79 1010 m s2 - 1* > 2 1 > 2 Dx 1.04 10-5 m 1.04 10-3 cm Ϸ 0.01 mm = * = * LF-1 A positively charged particle in an electric field experiences a If the same proton is injected into the field perpendicular to E (or at some angle force in the direction of the field. -
6.007 Lecture 5: Electrostatics (Gauss's Law and Boundary
Electrostatics (Free Space With Charges & Conductors) Reading - Shen and Kong – Ch. 9 Outline Maxwell’s Equations (In Free Space) Gauss’ Law & Faraday’s Law Applications of Gauss’ Law Electrostatic Boundary Conditions Electrostatic Energy Storage 1 Maxwell’s Equations (in Free Space with Electric Charges present) DIFFERENTIAL FORM INTEGRAL FORM E-Gauss: Faraday: H-Gauss: Ampere: Static arise when , and Maxwell’s Equations split into decoupled electrostatic and magnetostatic eqns. Electro-quasistatic and magneto-quasitatic systems arise when one (but not both) time derivative becomes important. Note that the Differential and Integral forms of Maxwell’s Equations are related through ’ ’ Stoke s Theorem and2 Gauss Theorem Charges and Currents Charge conservation and KCL for ideal nodes There can be a nonzero charge density in the absence of a current density . There can be a nonzero current density in the absence of a charge density . 3 Gauss’ Law Flux of through closed surface S = net charge inside V 4 Point Charge Example Apply Gauss’ Law in integral form making use of symmetry to find • Assume that the image charge is uniformly distributed at . Why is this important ? • Symmetry 5 Gauss’ Law Tells Us … … the electric charge can reside only on the surface of the conductor. [If charge was present inside a conductor, we can draw a Gaussian surface around that charge and the electric field in vicinity of that charge would be non-zero ! A non-zero field implies current flow through the conductor, which will transport the charge to the surface.] … there is no charge at all on the inner surface of a hollow conductor. -
Chapter 22 Magnetism
Chapter 22 Magnetism 22.1 The Magnetic Field 22.2 The Magnetic Force on Moving Charges 22.3 The Motion of Charged particles in a Magnetic Field 22.4 The Magnetic Force Exerted on a Current- Carrying Wire 22.5 Loops of Current and Magnetic Torque 22.6 Electric Current, Magnetic Fields, and Ampere’s Law Magnetism – Is this a new force? Bar magnets (compass needle) align themselves in a north-south direction. Poles: Unlike poles attract, like poles repel Magnet has NO effect on an electroscope and is not influenced by gravity Magnets attract only some objects (iron, nickel etc) No magnets ever repel non magnets Magnets have no effect on things like copper or brass Cut a bar magnet-you get two smaller magnets (no magnetic monopoles) Earth is like a huge bar magnet Figure 22–1 The force between two bar magnets (a) Opposite poles attract each other. (b) The force between like poles is repulsive. Figure 22–2 Magnets always have two poles When a bar magnet is broken in half two new poles appear. Each half has both a north pole and a south pole, just like any other bar magnet. Figure 22–4 Magnetic field lines for a bar magnet The field lines are closely spaced near the poles, where the magnetic field B is most intense. In addition, the lines form closed loops that leave at the north pole of the magnet and enter at the south pole. Magnetic Field Lines If a compass is placed in a magnetic field the needle lines up with the field.