Eulerian Cycle and Minimum Spanning Tree
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Steiner Minimal Trees
Steiner Minimal Trees¤ Bang Ye Wu Kun-Mao Chao 1 Steiner Minimal Trees While a spanning tree spans all vertices of a given graph, a Steiner tree spans a given subset of vertices. In the Steiner minimal tree problem, the vertices are divided into two parts: terminals and nonterminal vertices. The terminals are the given vertices which must be included in the solution. The cost of a Steiner tree is de¯ned as the total edge weight. A Steiner tree may contain some nonterminal vertices to reduce the cost. Let V be a set of vertices. In general, we are given a set L ½ V of terminals and a metric de¯ning the distance between any two vertices in V . The objective is to ¯nd a connected subgraph spanning all the terminals of minimal total cost. Since the distances are all nonnegative in a metric, the solution is a tree structure. Depending on the given metric, two versions of the Steiner tree problem have been studied. ² (Graph) Steiner minimal trees (SMT): In this version, the vertex set and metric is given by a ¯nite graph. ² Euclidean Steiner minimal trees (Euclidean SMT): In this version, V is the entire Euclidean space and thus in¯nite. Usually the metric is given by the Euclidean distance 2 (L -norm). That is, for two points with coordinates (x1; y2) and (x2; y2), the distance is p 2 2 (x1 ¡ x2) + (y1 ¡ y2) : In some applications such as VLSI routing, L1-norm, also known as rectilinear distance, is used, in which the distance is de¯ned as jx1 ¡ x2j + jy1 ¡ y2j: Figure 1 illustrates a Euclidean Steiner minimal tree and a graph Steiner minimal tree. -
Bayes Nets Conclusion Inference
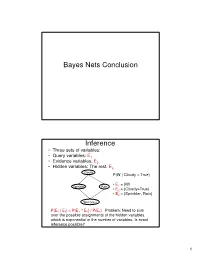
Bayes Nets Conclusion Inference • Three sets of variables: • Query variables: E1 • Evidence variables: E2 • Hidden variables: The rest, E3 Cloudy P(W | Cloudy = True) • E = {W} Sprinkler Rain 1 • E2 = {Cloudy=True} • E3 = {Sprinkler, Rain} Wet Grass P(E 1 | E 2) = P(E 1 ^ E 2) / P(E 2) Problem: Need to sum over the possible assignments of the hidden variables, which is exponential in the number of variables. Is exact inference possible? 1 A Simple Case A B C D • Suppose that we want to compute P(D = d) from this network. A Simple Case A B C D • Compute P(D = d) by summing the joint probability over all possible values of the remaining variables A, B, and C: P(D === d) === ∑∑∑ P(A === a, B === b,C === c, D === d) a,b,c 2 A Simple Case A B C D • Decompose the joint by using the fact that it is the product of terms of the form: P(X | Parents(X)) P(D === d) === ∑∑∑ P(D === d | C === c)P(C === c | B === b)P(B === b | A === a)P(A === a) a,b,c A Simple Case A B C D • We can avoid computing the sum for all possible triplets ( A,B,C) by distributing the sums inside the product P(D === d) === ∑∑∑ P(D === d | C === c)∑∑∑P(C === c | B === b)∑∑∑P(B === b| A === a)P(A === a) c b a 3 A Simple Case A B C D This term depends only on B and can be written as a 2- valued function fA(b) P(D === d) === ∑∑∑ P(D === d | C === c)∑∑∑P(C === c | B === b)∑∑∑P(B === b| A === a)P(A === a) c b a A Simple Case A B C D This term depends only on c and can be written as a 2- valued function fB(c) === === === === === === P(D d) ∑∑∑ P(D d | C c)∑∑∑P(C c | B b)f A(b) c b …. -

Tutorial 13 Travelling Salesman Problem1
MTAT.03.286: Design and Analysis of Algorithms University of Tartu Tutorial 13 Instructor: Vitaly Skachek; Assistants: Behzad Abdolmaleki, Oliver-Matis Lill, Eldho Thomas. Travelling Salesman Problem1 Basic algorithm Definition 1 A Hamiltonian cycle in a graph is a simple circuit that passes through each vertex exactly once. + Problem. Let G(V; E) be a complete undirected graph, and c : E 7! R be a cost function defined on the edges. Find a minimum cost Hamiltonian cycle in G. This problem is called a travelling salesman problem. To illustrate the motivation, imagine that a salesman has a list of towns it should visit (and at the end to return to his home city), and a map, where there is a certain distance between any two towns. The salesman wants to minimize the total distance traveled. Definition 2 We say that the cost function defined on the edges satisfies a triangle inequality if for any three edges fu; vg, fu; wg and fv; wg in E it holds: c (fu; vg) + c (fv; wg) ≥ c (fu; wg) : In what follows we assume that the cost function c satisfies the triangle inequality. The main idea of the algorithm: Observe that removing an edge from the optimal travelling salesman tour leaves a path through all vertices, which contains a spanning tree. We have the following relations: cost(TSP) ≥ cost(Hamiltonian path without an edge) ≥ cost(MST) : 1Additional reading: Section 3 in the book of V.V. Vazirani \Approximation Algorithms". 1 Next, we describe how to build a travelling salesman path. Find a minimum spanning tree in the graph. -

Linear Algebraic Techniques for Spanning Tree Enumeration
LINEAR ALGEBRAIC TECHNIQUES FOR SPANNING TREE ENUMERATION STEVEN KLEE AND MATTHEW T. STAMPS Abstract. Kirchhoff's Matrix-Tree Theorem asserts that the number of spanning trees in a finite graph can be computed from the determinant of any of its reduced Laplacian matrices. In many cases, even for well-studied families of graphs, this can be computationally or algebraically taxing. We show how two well-known results from linear algebra, the Matrix Determinant Lemma and the Schur complement, can be used to elegantly count the spanning trees in several significant families of graphs. 1. Introduction A graph G consists of a finite set of vertices and a set of edges that connect some pairs of vertices. For the purposes of this paper, we will assume that all graphs are simple, meaning they do not contain loops (an edge connecting a vertex to itself) or multiple edges between a given pair of vertices. We will use V (G) and E(G) to denote the vertex set and edge set of G respectively. For example, the graph G with V (G) = f1; 2; 3; 4g and E(G) = ff1; 2g; f2; 3g; f3; 4g; f1; 4g; f1; 3gg is shown in Figure 1. A spanning tree in a graph G is a subgraph T ⊆ G, meaning T is a graph with V (T ) ⊆ V (G) and E(T ) ⊆ E(G), that satisfies three conditions: (1) every vertex in G is a vertex in T , (2) T is connected, meaning it is possible to walk between any two vertices in G using only edges in T , and (3) T does not contain any cycles. -

Tree Structures
Tree Structures Definitions: o A tree is a connected acyclic graph. o A disconnected acyclic graph is called a forest o A tree is a connected digraph with these properties: . There is exactly one node (Root) with in-degree=0 . All other nodes have in-degree=1 . A leaf is a node with out-degree=0 . There is exactly one path from the root to any leaf o The degree of a tree is the maximum out-degree of the nodes in the tree. o If (X,Y) is a path: X is an ancestor of Y, and Y is a descendant of X. Root X Y CSci 1112 – Algorithms and Data Structures, A. Bellaachia Page 1 Level of a node: Level 0 or 1 1 or 2 2 or 3 3 or 4 Height or depth: o The depth of a node is the number of edges from the root to the node. o The root node has depth zero o The height of a node is the number of edges from the node to the deepest leaf. o The height of a tree is a height of the root. o The height of the root is the height of the tree o Leaf nodes have height zero o A tree with only a single node (hence both a root and leaf) has depth and height zero. o An empty tree (tree with no nodes) has depth and height −1. o It is the maximum level of any node in the tree. CSci 1112 – Algorithms and Data Structures, A. -

Teacher's Guide for Spanning and Weighted Spanning Trees
Teacher’s Guide for Spanning and weighted spanning trees: a different kind of optimization by sarah-marie belcastro 1TheMath. Let’s talk about spanning trees. No, actually, first let’s talk about graph theory,theareaof mathematics within which the topic of spanning trees lies. 1.1 Graph Theory Background. Informally, a graph is a collection of vertices (that look like dots) and edges (that look like curves), where each edge joins two vertices. Formally, A graph is a pair G =(V,E), where V is a set of dots and E is a set of pairs of vertices. Here are a few examples of graphs, in Figure 1: e b f a Figure 1: Examples of graphs. Note that the word vertex is singular; its plural is vertices. Two vertices that are joined by an edge are called adjacent. For example, the vertices labeled a and b in the leftmost graph of Figure 1 are adjacent. Two edges that meet at a vertex are called incident. For example, the edges labeled e and f in the leftmost graph of Figure 1 are incident. A subgraph is a graph that is contained within another graph. For example, in Figure 1 the second graph is a subgraph of the fourth graph. You can see this at left in Figure 2 where the subgraph in question is emphasized. Figure 2: More examples of graphs. In a connected graph, there is a way to get from any vertex to any other vertex without leaving the graph. The second graph of Figure 2 is not connected. -

A Simple Linear-Time Algorithm for Finding Path-Decompostions of Small Width
Introduction Preliminary Definitions Pathwidth Algorithm Summary A Simple Linear-Time Algorithm for Finding Path-Decompostions of Small Width Kevin Cattell Michael J. Dinneen Michael R. Fellows Department of Computer Science University of Victoria Victoria, B.C. Canada V8W 3P6 Information Processing Letters 57 (1996) 197–203 Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Pathwidth Algorithm Summary Outline 1 Introduction Motivation History 2 Preliminary Definitions Boundaried graphs Path-decompositions Topological tree obstructions 3 Pathwidth Algorithm Main result Linear-time algorithm Proof of correctness Other results Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Motivation Pathwidth Algorithm History Summary Motivation Pathwidth is related to several VLSI layout problems: vertex separation link gate matrix layout edge search number ... Usefullness of bounded treewidth in: study of graph minors (Robertson and Seymour) input restrictions for many NP-complete problems (fixed-parameter complexity) Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Motivation Pathwidth Algorithm History Summary History General problem(s) is NP-complete Input: Graph G, integer t Question: Is tree/path-width(G) ≤ t? Algorithmic development (fixed t): O(n2) nonconstructive treewidth algorithm by Robertson and Seymour (1986) O(nt+2) treewidth algorithm due to Arnberg, Corneil and Proskurowski (1987) O(n log n) treewidth algorithm due to Reed (1992) 2 O(2t n) treewidth algorithm due to Bodlaender (1993) O(n log2 n) pathwidth algorithm due to Ellis, Sudborough and Turner (1994) Kevin Cattell, Michael J. Dinneen, Michael R. -

Introduction to Spanning Tree Protocol by George Thomas, Contemporary Controls
Volume6•Issue5 SEPTEMBER–OCTOBER 2005 © 2005 Contemporary Control Systems, Inc. Introduction to Spanning Tree Protocol By George Thomas, Contemporary Controls Introduction powered and its memory cleared (Bridge 2 will be added later). In an industrial automation application that relies heavily Station 1 sends a message to on the health of the Ethernet network that attaches all the station 11 followed by Station 2 controllers and computers together, a concern exists about sending a message to Station 11. what would happen if the network fails? Since cable failure is These messages will traverse the the most likely mishap, cable redundancy is suggested by bridge from one LAN to the configuring the network in either a ring or by carrying parallel other. This process is called branches. If one of the segments is lost, then communication “relaying” or “forwarding.” The will continue down a parallel path or around the unbroken database in the bridge will note portion of the ring. The problem with these approaches is the source addresses of Stations that Ethernet supports neither of these topologies without 1 and 2 as arriving on Port A. This special equipment. However, this issue is addressed in an process is called “learning.” When IEEE standard numbered 802.1D that covers bridges, and in Station 11 responds to either this standard the concept of the Spanning Tree Protocol Station 1 or 2, the database will (STP) is introduced. note that Station 11 is on Port B. IEEE 802.1D If Station 1 sends a message to Figure 1. The addition of Station 2, the bridge will do ANSI/IEEE Std 802.1D, 1998 edition addresses the Bridge 2 creates a loop. -

Sampling Random Spanning Trees Faster Than Matrix Multiplication
Sampling Random Spanning Trees Faster than Matrix Multiplication David Durfee∗ Rasmus Kyng† John Peebles‡ Anup B. Rao§ Sushant Sachdeva¶ Abstract We present an algorithm that, with high probability, generates a random spanning tree from an edge-weighted undirected graph in Oe(n4/3m1/2 + n2) time 1. The tree is sampled from a distribution where the probability of each tree is proportional to the product of its edge weights. This improves upon the previous best algorithm due to Colbourn et al. that runs in matrix ω multiplication time, O(n ). For the special case of unweighted√ graphs, this improves upon the best previously known running time of O˜(min{nω, m n, m4/3}) for m n5/3 (Colbourn et al. ’96, Kelner-Madry ’09, Madry et al. ’15). The effective resistance metric is essential to our algorithm, as in the work of Madry et al., but we eschew determinant-based and random walk-based techniques used by previous algorithms. Instead, our algorithm is based on Gaussian elimination, and the fact that effective resistance is preserved in the graph resulting from eliminating a subset of vertices (called a Schur complement). As part of our algorithm, we show how to compute -approximate effective resistances for a set S of vertex pairs via approximate Schur complements in Oe(m + (n + |S|)−2) time, without using the Johnson-Lindenstrauss lemma which requires Oe(min{(m + |S|)−2, m + n−4 + |S|−2}) time. We combine this approximation procedure with an error correction procedure for handing edges where our estimate isn’t sufficiently accurate. -
‣ Dijkstra's Algorithm ‣ Minimum Spanning Trees ‣ Prim, Kruskal, Boruvka ‣ Single-Link Clustering ‣ Min-Cost Arborescences
4. GREEDY ALGORITHMS II ‣ Dijkstra's algorithm ‣ minimum spanning trees ‣ Prim, Kruskal, Boruvka ‣ single-link clustering ‣ min-cost arborescences Lecture slides by Kevin Wayne Copyright © 2005 Pearson-Addison Wesley http://www.cs.princeton.edu/~wayne/kleinberg-tardos Last updated on Feb 18, 2013 6:08 AM 4. GREEDY ALGORITHMS II ‣ Dijkstra's algorithm ‣ minimum spanning trees ‣ Prim, Kruskal, Boruvka ‣ single-link clustering ‣ min-cost arborescences SECTION 4.4 Shortest-paths problem Problem. Given a digraph G = (V, E), edge weights ℓe ≥ 0, source s ∈ V, and destination t ∈ V, find the shortest directed path from s to t. 1 15 3 5 4 12 source s 0 3 8 7 7 2 9 9 6 1 11 5 5 4 13 4 20 6 destination t length of path = 9 + 4 + 1 + 11 = 25 3 Car navigation 4 Shortest path applications ・PERT/CPM. ・Map routing. ・Seam carving. ・Robot navigation. ・Texture mapping. ・Typesetting in LaTeX. ・Urban traffic planning. ・Telemarketer operator scheduling. ・Routing of telecommunications messages. ・Network routing protocols (OSPF, BGP, RIP). ・Optimal truck routing through given traffic congestion pattern. Reference: Network Flows: Theory, Algorithms, and Applications, R. K. Ahuja, T. L. Magnanti, and J. B. Orlin, Prentice Hall, 1993. 5 Dijkstra's algorithm Greedy approach. Maintain a set of explored nodes S for which algorithm has determined the shortest path distance d(u) from s to u. ・Initialize S = { s }, d(s) = 0. ・Repeatedly choose unexplored node v which minimizes shortest path to some node u in explored part, followed by a single edge (u, v) ℓe v d(u) u S s 6 Dijkstra's algorithm Greedy approach. -

Converting MST to TSP Path by Branch Elimination
applied sciences Article Converting MST to TSP Path by Branch Elimination Pasi Fränti 1,2,* , Teemu Nenonen 1 and Mingchuan Yuan 2 1 School of Computing, University of Eastern Finland, 80101 Joensuu, Finland; [email protected] 2 School of Big Data & Internet, Shenzhen Technology University, Shenzhen 518118, China; [email protected] * Correspondence: [email protected].fi Abstract: Travelling salesman problem (TSP) has been widely studied for the classical closed loop variant but less attention has been paid to the open loop variant. Open loop solution has property of being also a spanning tree, although not necessarily the minimum spanning tree (MST). In this paper, we present a simple branch elimination algorithm that removes the branches from MST by cutting one link and then reconnecting the resulting subtrees via selected leaf nodes. The number of iterations equals to the number of branches (b) in the MST. Typically, b << n where n is the number of nodes. With O-Mopsi and Dots datasets, the algorithm reaches gap of 1.69% and 0.61 %, respectively. The algorithm is suitable especially for educational purposes by showing the connection between MST and TSP, but it can also serve as a quick approximation for more complex metaheuristics whose efficiency relies on quality of the initial solution. Keywords: traveling salesman problem; minimum spanning tree; open-loop TSP; Christofides 1. Introduction The classical closed loop variant of travelling salesman problem (TSP) visits all the nodes and then returns to the start node by minimizing the length of the tour. Open loop TSP is slightly different variant, which skips the return to the start node. -

Lowest Common Ancestors in Trees and Directed Acyclic Graphs1
Lowest Common Ancestors in Trees and Directed Acyclic Graphs1 Michael A. Bender2 3 Martín Farach-Colton4 Giridhar Pemmasani2 Steven Skiena2 5 Pavel Sumazin6 Version: We study the problem of finding lowest common ancestors (LCA) in trees and directed acyclic graphs (DAGs). Specifically, we extend the LCA problem to DAGs and study the LCA variants that arise in this general setting. We begin with a clear exposition of Berkman and Vishkin’s simple optimal algorithm for LCA in trees. The ideas presented are not novel theoretical contributions, but they lay the foundation for our work on LCA problems in DAGs. We present an algorithm that finds all-pairs-representative : LCA in DAGs in O~(n2 688 ) operations, provide a transitive-closure lower bound for the all-pairs-representative-LCA problem, and develop an LCA-existence algorithm that preprocesses the DAG in transitive-closure time. We also present a suboptimal but practical O(n3) algorithm for all-pairs-representative LCA in DAGs that uses ideas from the optimal algorithms in trees and DAGs. Our results reveal a close relationship between the LCA, all-pairs-shortest-path, and transitive-closure problems. We conclude the paper with a short experimental study of LCA algorithms in trees and DAGs. Our experiments and source code demonstrate the elegance of the preprocessing-query algorithms for LCA in trees. We show that for most trees the suboptimal Θ(n log n)-preprocessing Θ(1)-query algorithm should be preferred, and demonstrate that our proposed O(n3) algorithm for all- pairs-representative LCA in DAGs performs well in both low and high density DAGs.