GPS and GLONASS Vector Tracking for Navigation in Challenging Signal Environments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Comparing Four Methods of Correcting GPS Data: DGPS, WAAS, L-Band, and Postprocessing Dick Karsky, Project Leader
United States Department of Agriculture Engineering Forest Service Technology & Development Program July 2004 0471-2307–MTDC 2200/2300/2400/3400/5100/5300/5400/ 6700/7100 Comparing Four Methods of Correcting GPS Data: DGPS, WAAS, L-Band, and Postprocessing Dick Karsky, Project Leader he global positioning system (GPS) of satellites DGPS Beacon Corrections allows persons with standard GPS receivers to know where they are with an accuracy of 5 meters The U.S. Coast Guard has installed two control centers Tor so. When more precise locations are needed, and more than 60 beacon stations along the coastal errors (table 1) in GPS data must be corrected. A waterways and in the interior United States to transmit number of ways of correcting GPS data have been DGPS correction data that can improve GPS accuracy. developed. Some can correct the data in realtime The beacon stations use marine radio beacon fre- (differential GPS and the wide area augmentation quencies to transmit correction data to the remote GPS system). Others apply the corrections after the GPS receiver. The correction data typically provides 1- to data has been collected (postprocessing). 5-meter accuracy in real time. In theory, all methods of correction should yield similar In principle, this process is quite simple. A GPS receiver results. However, because of the location of different normally calculates its position by measuring the time it reference stations, and the equipment used at those takes for a signal from a satellite to reach its position. stations, the different methods do produce different Because the GPS receiver knows exactly where results. -

GLONASS & GPS HW Designs
GLONASS & GPS HW designs Recommendations with u-blox 6 GPS receivers Application Note Abstract This document provides design recommendations for GLONASS & GPS HW designs with u-blox 6 module or chip designs. u-blox AG Zürcherstrasse 68 8800 Thalwil Switzerland www.u-blox.com Phone +41 44 722 7444 Fax +41 44 722 7447 [email protected] GLONASS & GPS HW designs - Application Note Document Information Title GLONASS & GPS HW designs Subtitle Recommendations with u-blox 6 GPS receivers Document type Application Note Document number GPS.G6-CS-10005 Document status Preliminary This document and the use of any information contained therein, is subject to the acceptance of the u-blox terms and conditions. They can be downloaded from www.u-blox.com. u-blox makes no warranties based on the accuracy or completeness of the contents of this document and reserves the right to make changes to specifications and product descriptions at any time without notice. u-blox reserves all rights to this document and the information contained herein. Reproduction, use or disclosure to third parties without express permission is strictly prohibited. Copyright © 2011, u-blox AG. ® u-blox is a registered trademark of u-blox Holding AG in the EU and other countries. GPS.G6-CS-10005 Page 2 of 16 GLONASS & GPS HW designs - Application Note Contents Contents .............................................................................................................................. 3 1 Introduction ................................................................................................................. -

AEN-88: the Global Positioning System
AEN-88 The Global Positioning System Tim Stombaugh, Doug McLaren, and Ben Koostra Introduction cies. The civilian access (C/A) code is transmitted on L1 and is The Global Positioning System (GPS) is quickly becoming freely available to any user. The precise (P) code is transmitted part of the fabric of everyday life. Beyond recreational activities on L1 and L2. This code is scrambled and can be used only by such as boating and backpacking, GPS receivers are becoming a the U.S. military and other authorized users. very important tool to such industries as agriculture, transporta- tion, and surveying. Very soon, every cell phone will incorporate Using Triangulation GPS technology to aid fi rst responders in answering emergency To calculate a position, a GPS receiver uses a principle called calls. triangulation. Triangulation is a method for determining a posi- GPS is a satellite-based radio navigation system. Users any- tion based on the distance from other points or objects that have where on the surface of the earth (or in space around the earth) known locations. In the case of GPS, the location of each satellite with a GPS receiver can determine their geographic position is accurately known. A GPS receiver measures its distance from in latitude (north-south), longitude (east-west), and elevation. each satellite in view above the horizon. Latitude and longitude are usually given in units of degrees To illustrate the concept of triangulation, consider one satel- (sometimes delineated to degrees, minutes, and seconds); eleva- lite that is at a precisely known location (Figure 1). If a GPS tion is usually given in distance units above a reference such as receiver can determine its distance from that satellite, it will have mean sea level or the geoid, which is a model of the shape of the narrowed its location to somewhere on a sphere that distance earth. -
GPS Applications in Space
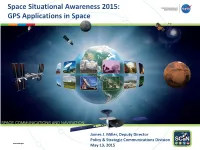
Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New Space Ops, Science, and Exploration Apps GPS Relative Navigation is used for Rendezvous to ISS GPS PNT Services Enable: • Attitude Determination: Use of GPS enables some missions to meet their attitude determination requirements, such as ISS • Real-time On-Board Navigation: Enables new methods of spaceflight ops such as rendezvous & docking, station- keeping, precision formation flying, and GEO satellite servicing • Earth Sciences: GPS used as a remote sensing tool supports atmospheric and ionospheric sciences, geodesy, and geodynamics -- from monitoring sea levels and ice melt to measuring the gravity field ESA ATV 1st mission JAXA’s HTV 1st mission Commercial Cargo Resupply to ISS in 2008 to ISS in 2009 (Space-X & Cygnus), 2012+ 2 Growing GPS Uses in Space: Space Operations & Science • NASA strategic navigation requirements for science and 20-Year Worldwide Space Mission space ops continue to grow, especially as higher Projections by Orbit Type* precisions are needed for more complex operations in all space domains 1% 5% Low Earth Orbit • Nearly 60%* of projected worldwide space missions 27% Medium Earth Orbit over the next 20 years will operate in LEO 59% GeoSynchronous Orbit – That is, inside the Terrestrial Service Volume (TSV) 8% Highly Elliptical Orbit Cislunar / Interplanetary • An additional 35%* of these space missions that will operate at higher altitudes will remain at or below GEO – That is, inside the GPS/GNSS Space Service Volume (SSV) Highly Elliptical Orbits**: • In summary, approximately 95% of projected Example: NASA MMS 4- worldwide space missions over the next 20 years will satellite constellation. -

An Overview of Global Positioning System (GPS)
Technical Article February 2012 | page 1 An Overview of Global Positioning System (GPS) The Global Positioning System (GPS) is a satellite–based radio–navigation system. GPS provides reliable positioning, navigation, and timing services to users on a continuous worldwide basis. The satellite system was built by the United States, but its services are freely available to everyone on the planet. For anyone with a GPS receiver, the system provides location and time. GPS provides accurate location and time information for an unlimited number of people in all weather, day or night, anywhere in the world. The GPS is made up of three parts: satellites orbiting the Earth; control and monitoring stations on Earth; and the GPS receivers (either stand–alone devices or integrated sub–systems) operated by users. GPS satellites broadcast continuous signals which are picked up and identified by GPS receivers. Each GPS receiver then provides three–dimensional location information (latitude, longitude, and altitude), plus the current time. Equipped with a GPS receiver, any user can accurately locate where they are and easily navigate to where they want to go, whether walking, driving, flying, or boating. GPS has become an important part of transportation systems worldwide, providing navigation for aviation, ground, and maritime operations. Disaster relief and emergency service agencies depend upon GPS for location and timing capabilities in their life–saving missions. Everyday activities such as banking, mobile phone operations, and even the control of power grids, are facilitated by the accurate timing provided by GPS. Farmers, surveyors, geologists and countless others perform their work more efficiently, safely, economically, and accurately using the free and open GPS signals. -
Quality Monitoring of GPS Signals
Geomatics Engineering UCGE Reports Number 20149 Department of Geomatics Engineering Quality Monitoring Of GPS Signals A Thesis By Andrew Jonathan Jakab July 2001 Calgary, Alberta, Canada THE UNIVERSITY OF CALGARY QUALITY MONITORING OF GPS SIGNALS by Andrew Jonathan Jakab A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE DEPARTMENT OF GEOMATICS ENGINEERING CALGARY, ALBERTA JULY, 2001 © Andrew Jonathan Jakab 2001 ABSTRACT With an increased reliance on the Global Positioning System to provide accurate and reliable results, there has also been an equivalent desire to validate the results. This validation comes in the form of a real-time signal quality monitoring scheme that will be able to detect spurious non-standard transmissions of the satellite signal. These faults result in the distortion of the autocorrelation function that then causes differences in code tracking errors in differently designed receivers. This thesis outlines the associated problems with detecting very small distortion of the autocorrelation function. Manufacturing tolerances of componentry, temperature, and multipath signals all contribute to the problem. A means of correcting for all problems, specifically multipath, is presented based on the use of the newly invented ‘Multipath Meter’, which will correct the autocorrelation function measurements for multipath without masking a signal failure. Radio Frequency interference detection is also presented as part of the SQM scheme. iii ACKNOWLEDGEMENTS Thanks to my supervisor, Dr. Gerard Lachapelle, for his input and guidance during my stay at the university. Thanks to all those involved at NovAtel Inc., specifically Tony Murfin and Michael Clayton, for their continued support in my personal development through RTCA and ICAO meetings, as well as course work at the university and the creation of this thesis. -

2004 GPS-Galileo Agreement (Establishing Cooperation)
AGREEMENT ON THE PROMOTION, PROVISION AND USE OF GALILEO AND GPS SATELLITE-BASED NAVIGATION SYSTEMS AND RELATED APPLICATIONS USA/CE/en 1 THE UNITED STATES OF AMERICA, of the one part, and THE KINGDOM OF BELGIUM, THE CZECH REPUBLIC, THE KINGDOM OF DENMARK, THE FEDERAL REPUBLIC OF GERMANY, THE REPUBLIC OF ESTONIA, THE HELLENIC REPUBLIC, THE KINGDOM OF SPAIN, THE FRENCH REPUBLIC, IRELAND, THE ITALIAN REPUBLIC, THE REPUBLIC OF CYPRUS, THE REPUBLIC OF LATVIA, USA/CE/en 2 THE REPUBLIC OF LITHUANIA, THE GRAND DUCHY OF LUXEMBOURG, THE REPUBLIC OF HUNGARY, THE REPUBLIC OF MALTA, THE KINGDOM OF THE NETHERLANDS, THE REPUBLIC OF AUSTRIA, THE REPUBLIC OF POLAND, THE PORTUGUESE REPUBLIC, THE REPUBLIC OF SLOVENIA, THE SLOVAK REPUBLIC, THE REPUBLIC OF FINLAND, THE KINGDOM OF SWEDEN, THE UNITED KINGDOM OF GREAT BRITAIN AND NORTHERN IRELAND, USA/CE/en 3 CONTRACTING PARTIES to the Treaty establishing THE EUROPEAN COMMUNITY, hereinafter referred to as the "Member States", and THE EUROPEAN COMMUNITY, of the other part, RECOGNISING that the United States operates a satellite-based navigation system known as the Global Positioning System, a dual use system that provides precision timing, navigation, and position location signals for civil and military purposes, RECOGNISING that the United States is currently providing the GPS Standard Positioning Service for peaceful civil, commercial, and scientific use on a continuous, worldwide basis, free of direct user fees, and noting that the United States intends to continue providing it, and similar future civil services -

Determination of Water Level and Tides Using Interferometric Observations of GPS Signals
1118 JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY VOLUME 17 Determination of Water Level and Tides Using Interferometric Observations of GPS Signals KENNETH D. ANDERSON Space and Naval Warfare Systems Center San Diego, San Diego, California (Manuscript received 4 May 1999, in ®nal form 17 September 1999) ABSTRACT A nonintrusive remote sensing method to measure water level is examined. It relies on the fact that water is a good re¯ector of radio frequency energy, thus, on a satellite-to-ground path when the satellite is near the horizon, a readily detectable interference pattern is formed as the satellite moves through its orbit. Provided that the elevation angles from the ground-based receiver to the satellite are small enough for good re¯ection but not so small that atmospheric refractive effects contribute, the shape of this interference pattern is strongly related to the geometry of propagation. Results from interferometric observations of Global Positioning System (GPS) satellite signals are presented for two sets of measurements where the receiving antenna varied from 7 to 10 m above the nominal water surface. These results, compared to in situ or nearby tide gauges, show that water level is measured to an accuracy of about 12 cm. A GPS receiver, a laptop computer, and a clear over- water path to the horizon are all that is needed to provide an affordable means for tracking water levels or ocean tides. 1. Introduction location of interest is far away from a tide gauge, errors in estimating the hydrology can signi®cantly affect the Along the shoreline of oceans, or seas, determining calculations relating the height of the water surface to the height of a land-based object above the water surface the vertical datum. -

Comparison Between GPS and Galileo Satellite Availability in the Presence of CW Interference
Comparison between GPS and Galileo satellite availability in the presence of CW interference Asghar Tabatabaei Balaei Cooperative Research Centre for Spatial Information Systems and School of Surveying and Spatial Information at the University of New South Wales/Australia +61 2 93854206/[email protected] Jinghui Wu School of Surveying and Spatial Information at the University of New South Wales/Australia +61 2 93854206/ [email protected] Andrew G. Dempster Cooperative Research Centre for Spatial Information Systems and School of Surveying and Spatial Information at the University of New South Wales/Australia +61 2 93856890/[email protected] ABSTRACT GNSS receivers have been shown to be most vulnerable to CW interference. It affects the acquisition process of the signal and can also pass through the tracking loop filters to affect the received satellite signal quality. Carrier to noise density ratio (C/No) is an indicator of received signal quality to the receiver. Lower C/No means lower quality of the received signal. Galileo satellites will be soon in place operating together with GPS satellites. Considering the designer’s intention of maintaining interoperability between different satellite navigation systems, it is reasonable to seek a quantified comparison between the different systems in terms of vulnerability to CW interference. In this paper, considering the signal structures, the characterization of the effect of CW interference on the C/No for GPS and Galileo is investigated and compared. It is shown that for the available Galileo signal (GIOVE-A BOC(1, 1) in the E1/L1 band), the worst spectral line happens far from the L1 frequency. -
3. Compass and Navigational Gps
3. COMPASS AND NAVIGATIONAL GPS Two different methods of navigation will be used while you conduct monitoring. You will use a navigational GPS to locate transect start points, keep track of meters walked, check the Juno grab for validity, and return to your vehicle from the transect. A compass will be used to set and hold the correct bearing as you walk, and to report azimuth and bearing. The integrated Juno GPS is not for navigation; it is used solely to transfer location data to the collection system. The goal of Compass and Navigational GPS training is to enable you to confidently and correctly apply your existing knowledge of GPS and compass navigation to distance sampling. It is expected that you already have a basic understanding of how to navigate with a compass and a standard recreational grade GPS unit. These skills are crucial to collecting data, as well as to your personal safety and the safety of those around you. Objective 1: Basic understanding of GPS. Navigational GPSs are provided by each monitoring team, so unit set up, operation, and maintenance are the responsibility of each team. Emphasis in USFWS training is on application to distance sampling for desert tortoises. Standard: Understand GPS basics, including what GPS is and how it works Standard: Understand coordinate systems and how they are applied to GPS Standard: Understand the importance of GPS signal strength Standard: Correctly utilize GPS in the context of distance sampling surveys Objective 2: Basic understanding of compass use. Compasses are provided by each monitoring team, so compass set up, operation, and maintenance are the responsibility of each team. -

Heighting with Gps: Possibilities and Limitations
HEIGHTING WITH GPS: POSSIBILITIES AND LIMITATIONS Matthew B. Higgins ABSTRACT Global Positioning System (GPS) surveying is now seen as a true three dimensional tool and GPS heighting can be a viable alternative to other more conventional forms of height measurement. This paper examines the limitations and possibilities of GPS heighting. The first part of the paper details the limitations of GPS heighting, including those factors that affect the GPS height measurement itself and the associated issues of geoid modeling and compatibility with the local vertical datum. The second part of the paper examines the possibilities for GPS heighting, focusing on three application areas currently generating interest for the practicing surveyor; deformation monitoring, real time GPS surveying and machine monitoring and guidance. These applications cover the range of achievable GPS heighting accuracy. INTRODUCTION Global Positioning System (GPS) surveying has been used extensively and with great success for the production and propagation of survey control. During the development of GPS surveying the focus was typically on horizontal control with the ability of GPS to measure height being seen as an added extra. GPS surveying has now matured to the point where it is seen as a true three dimensional tool. However, application of GPS to the measurement of height can be complex and solving the problems involved can account for the majority of the effort in finalising a GPS surveying project. GPS measures heights related to the ellipsoid. In some cases ellipsoidal heights alone are sufficient for the type of survey being undertaken. However, many applications require heights that are related to a physically meaningful surface such as the geoid, or at least some attempt at realizing the geoid such as a surface based on locally observed mean sea level. -

Basics of the GPS Technique: Observation Equations§
Basics of the GPS Technique: Observation Equations§ Geoffrey Blewitt Department of Geomatics, University of Newcastle Newcastle upon Tyne, NE1 7RU, United Kingdom [email protected] Table of Contents 1. INTRODUCTION.....................................................................................................................................................2 2. GPS DESCRIPTION................................................................................................................................................2 2.1 THE BASIC IDEA ........................................................................................................................................................2 2.2 THE GPS SEGMENTS..................................................................................................................................................3 2.3 THE GPS SIGNALS .....................................................................................................................................................6 3. THE PSEUDORANGE OBSERVABLE ................................................................................................................8 3.1 CODE GENERATION....................................................................................................................................................9 3.2 AUTOCORRELATION TECHNIQUE .............................................................................................................................12 3.3 PSEUDORANGE OBSERVATION EQUATIONS..............................................................................................................13