Tilt Rotor Research Aircraft Familiarization Document
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mcdonnell Douglas (Boeing) MD-83
Right MLG failure on landing, Douglas (Boeing) MD-83, EC-FXI Micro-summary: The right main landing gear of this Douglas (Boeing) MD-83 failed immediately on landing. Event Date: 2001-05-10 at 1232 UTC Investigative Body: Aircraft Accident Investigation Board (AAIB), United Kingdom Investigative Body's Web Site: http://www.aaib.dft.gov/uk/ Note: Reprinted by kind permission of the AAIB. Cautions: 1. Accident reports can be and sometimes are revised. Be sure to consult the investigative agency for the latest version before basing anything significant on content (e.g., thesis, research, etc). 2. Readers are advised that each report is a glimpse of events at specific points in time. While broad themes permeate the causal events leading up to crashes, and we can learn from those, the specific regulatory and technological environments can and do change. Your company's flight operations manual is the final authority as to the safe operation of your aircraft! 3. Reports may or may not represent reality. Many many non-scientific factors go into an investigation, including the magnitude of the event, the experience of the investigator, the political climate, relationship with the regulatory authority, technological and recovery capabilities, etc. It is recommended that the reader review all reports analytically. Even a "bad" report can be a very useful launching point for learning. 4. Contact us before reproducing or redistributing a report from this anthology. Individual countries have very differing views on copyright! We can advise you on the steps to follow. Aircraft Accident Reports on DVD, Copyright © 2006 by Flight Simulation Systems, LLC All rights reserved. -

Large Capacity Oblique All-Wing Transport Aircraft
f Large Capacity Oblique All-Wing Transport Aircraft Thomas L. Galloway James A. Phillips Robert A. Kennelly, Jr. NASA Ames Research Center Moffett Field, CA Mr. Mark H. Waters Thermosciences Institute, ELORET Corp. Palo Alto, CA Transportation Beyond 2000: Engineering Design for the Future September 26-28, 1995 461 INTRODUCTION Dr. R. T. Jones first developed the theory for oblique wing aircraft in 1952, and in subsequent years numerous analytical and experimental projects conducted at NASA Ames and elsewhere have established that the Jones' oblique wing theory is correct. Until the late 1980's all proposed oblique wing configurations were wing/body aircraft with the wing mounted on a pivot. With the emerging requirement for commercial transports with very large payloads, 450 - 800 passengers, Jones proposed a supersonic oblique flying wing in 1988. For such an aircraft all payload, fuel, and systems are carded within the wing, and the wing is designed with a variable sweep to maintain a fixed subsonic normal Mach number. Engines and vertical tails are mounted on pivots supported from the primary structure of the wing. The oblique flying wing transport has come to be known as the Oblique All-Wing transport (OAW). Initial studies of the OAW were conducted by Van der Velden first at U.C. Berkeley(l) in 1989 and then at Stanford in collaboration with Kroo(2) in 1990. A final document summarizing this work is given in the thesis by Van der Velden(3). Many issues regarding the design were identified in these studies, among them the need for the OAW to be an unstable aircraft. -

ATINER's Conference Paper Series IND2013-0819
ATINER CONFERENCE PAPER SERIES No: IND2013-0819 Athens Institute for Education and Research ATINER ATINER's Conference Paper Series IND2013-0819 Optimally Adaptive Oleo Strut Damping for Aircraft and UAV Using MR Fluid Ajinkya A. Gharapurkar Graduate Research Assistant Dept. of Mechanical and Industrial Engineering, Concordia University Canada Chandra B. Asthana Affiliate Associate Professor Dept. of Mechanical and Industrial Engineering, Concordia University Canada Rama B. Bhat Professor Dept. of Mechanical and Industrial Engineering, Concordia University, Canada 1 ATINER CONFERENCE PAPER SERIES No: IND2013-0819 Athens Institute for Education and Research 8 Valaoritou Street, Kolonaki, 10671 Athens, Greece Tel: + 30 210 3634210 Fax: + 30 210 3634209 Email: [email protected] URL: www.atiner.gr URL Conference Papers Series: www.atiner.gr/papers.htm Printed in Athens, Greece by the Athens Institute for Education and Research. All rights reserved. Reproduction is allowed for non-commercial purposes if the source is fully acknowledged. ISSN 2241-2891 23/1/2014 2 ATINER CONFERENCE PAPER SERIES No: IND2013-0819 An Introduction to ATINER's Conference Paper Series ATINER started to publish this conference papers series in 2012. It includes only the papers submitted for publication after they were presented at one of the conferences organized by our Institute every year. The papers published in the series have not been refereed and are published as they were submitted by the author. The series serves two purposes. First, we want to disseminate the information as fast as possible. Second, by doing so, the authors can receive comments useful to revise their papers before they are considered for publication in one of ATINER's books, following our standard procedures of a blind review. -

T-45C Aircraft
VIRTUAL NATOPS FLIGHT MANUAL NAVY MODEL T-45C AIRCRAFT for Microsoft Flight Simulator by IndiaFoxtEcho Visual Simulations Version 1.00 – March 2021 NOTICE – Although this manual and the simulated aircraft closerly resemble their real-world counterparts in many aspects, neither should be used as source of real-world information about the aircraft. This package is not endorsed or supported by The Boeing Company or by the United States Navy. CHANGE LOG VERSION 1.10 22-Mar-2021 - Redone external engine sounds - Replaced internal engine sound main loop sample - Fixed bug preventing setting the CRS on TACAN (Nav2) - Created "Lite" versions of all aircrafts, with simplified XML code and geometry - Implemented VR mouse collision model - Fixed environmental occlusion geometry - Fixed missing details in rear cockpit harnessing - Fixed bug causing cockpit sounds from other T-45 to play in multiplayer - Fixed formation light switch INOP - Fixed bug causing the HUD throttle indicator not to work - Fixed external lights not working after Sim Update 3 - Changed animation of retractable footstep so that automatically retracts when the canopy closes - Changed HUD ILS logic so that ILS steering bar will only show if ILS is selected on the HSI-MFD - Added TAWS Below Glideslope warning - Added TAWS Check Gear warning - Added TAWS Power Power warning INITIAL RELEASE 8-Mar-2021 WELCOME The T-45 Goshawk is a fully carrier-capable version of the British Aerospace Hawk Mk.60. It was developed as a jet flight trainer for the United States Navy and United States Marine Corps. The Hawk had not originally been designed to perform carrier operations; numerous modifications were required, such as the extensive strengthening of the airframe to withstand the excessive forces imposed by the stresses involved in catapult launches and high sink-rate landings, both scenarios being routine in aircraft carrier operations. -

Introduction to Airplane Performance Prof. AK Ghosh Department Of
NOC: Introduction to Airplane Performance Prof. A. K. Ghosh Department of Aerospace Engineering Indian Institute of Technology, Kanpur Module - 01 Lecture - 03 Introduction to airplane and its components (Refer Slide Time: 00:09) This is Sinus 912 aircraft which is a motor glider and its manufacturer is Pipistrel. So, we will today we will discuss about the structure and the instrument panel of this motor glider. This is an all made its construction is of composite material. This is the spinner of the aircraft having a 2 bladed propeller which is vireo. Then, it has a rotex 912 engine installed in it which is a 4 cylinder engine and it is a piston engine 4 stroke. Moving ahead we come to the wing. This is the starboard wing of the aircraft which is containing a pitot tube. This is the pitot tube which senses the pitot pressure and the static pressure from the static veins located just beneath it. It senses the dynamic pressure and gives to the pitot instruments like ASI, altimeter and vertical speed indicator. (Refer Slide Time: 00:59) Then, it has a wing span of 15 meters. For this wing contains a flaperon. Normally all aircrafts have either aileron and a flap, but in this varying motor glider the 2 control surfaces are combined in one and then that is of flaperon which consist of a flap and aileron that helps in rolling and as well as at the time of takeoff and landing. (Refer Slide Time: 01:24) So, this is the impeller section of the aircraft this is the tail section which consist of the vertical stabilizer, the horizontal stabilizer; attached to it is the moving part that is the elevator and the rudder. -
The Wing Is the Principal Structural Unit of the Airplane. It Has Several Functions Beyond That of Providing Lift. for a Wing To
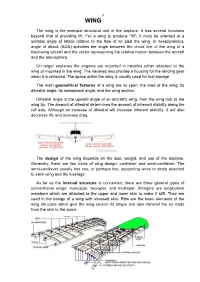
1 WING The wing is the principal structural unit of the airplane. It has several functions beyond that of providing lift. For a wing to produce "lift", it must be oriented at a suitable angle of attack relative to the flow of air past the wing. In aerodynamics, angle of attack (AOA) specifies the angle between the chord line of the wing of a fixed-wing aircraft and the vector representing the relative motion between the aircraft and the atmosphere. On larger airplanes the engines are mounted in nacelles either attached to the wing or mounted in the wing. The nacelles also provide a housing for the landing gear when it is retracted. The space within the wing is usually used for fuel storage. The main geometrical features of a wing are its span; the area of the wing; its dihedral angle; its sweepback angle; and the wing section. Dihedral angle is the upward angle of an aircraft's wing, from the wing root to the wing tip. The amount of dihedral determines the amount of inherent stability along the roll axis. Although an increase of dihedral will increase inherent stability, it will also decrease lift, and increase drag. The design of the wing depends on the size, weight, and use of the airplane. Generally, there are two kinds of wing design: cantilever and semi-cantilever. The semi-cantilever usually has one, or perhaps two, supporting wires or struts attached to each wing and the fuselage. As far as the internal structure is concerned, there are three general types of conventional wings: monospar, two-spar, and multispar. -
Theory of Aircraft Flight. Aerospace Education II. Instructional Unit I. INSTITUTION Air Univ., Maxwell AFB, Ala
DOCUMENT RESUME ED 111 639 SE 019 339 AUTHOR. Elmer, James D. TITLE Theory of Aircraft Flight. Aerospace Education II. Instructional Unit I. INSTITUTION Air Univ., Maxwell AFB, Ala. Junior Reserve Office Training Corps. REPORT NO k. AE-2-7201 PUB DATE Feb 75 NOTE 73p.; For the accompanying textbook see SE 019 338 EDRS PRICE MF-$0.76 HC-$3.32_)-Plus Postage, DESCRIPTORS. *Aerospace Education; *Aerospace Technology; Course Organization; Curriculum Guides; *Instructional Materials; *Physical Sciences; *Physics; Secondary Education; Teaching Guides; Unit. Plan IDENTIFIERS *Air Force Junior'ROTC ABSTRACT This publication provides guidelines for teachers using the Aerospace Education II series publication entitled "Theory of Aircraft Flight." The organization of the guide for each chapter is according/to objectives (traditional and behavioral), suggested outline,,orientation, suggested key points, suggestions for teaching, instructional aids, projects, and further reading. A separate sheet is attached at the end-of each chapter for teacher ideas for improvement of the chapter. Specific suggestions have been made ihfOughout the guide for the ,major concepts. Page references corresponding to the textbook'are made where appropriate.(PS) Ae* *********************************************************************** Documents acquired by ERIC include many informal unpublished * materials not available from other sources. ERIC makes every effort * * to obtain the best copy available, nevertheless, items of marginal * * reproducibility are often encountered -

FAA Safety Briefing January/February 2020 Volume 60/Number 1
November/DecemberJanuary/February 2020 2019 Know Your Aircraft Federal Aviation 8 NoA VerySurprises Long Title for One of the20 FeatureThe Wing’s Title24 Give of One Me Feature a Brake ... Administration 10KeepingStories Control Could Possiblyof Go in thisthe SpaceThing 16 Storyand Maybe Goes Here a Tire and a Avionics and Automation Strut TooJanuary / February 2020 1 ABOUT THIS ISSUE ... U.S. Department of Transportation Federal Aviation Administration ISSN: 1057-9648 FAA Safety Briefing January/February 2020 Volume 60/Number 1 Elaine L. Chao Secretary of Transportation The January/February 2020 issue of FAA Safety Steve Dickson Administrator Briefing focuses on how to better “Know Your Aircraft.” Ali Bahrami Associate Administrator for Aviation Safety Feature articles cover each major section of an Executive Director, Flight Standards Service Rick Domingo aircraft, highlighting the many design, performance Editor Susan Parson and structural variations you’ll likely see and how Tom Hoffmann Managing Editor they affect your flying. We’ll also take a fresh look at James Williams Associate Editor / Photo Editor Jennifer Caron Copy Editor / Quality Assurance Lead understanding aircraft energy management. Paul Cianciolo Associate Editor / Social Media John Mitrione Art Director Published six times a year, FAA Safety Briefing, formerly Contact information FAA Aviation News, promotes aviation safety by discussing current The magazine is available on the internet at: technical, regulatory, and procedural aspects affecting the safe www.faa.gov/news/safety_briefing operation and maintenance of aircraft. Although based on current FAA policy and rule interpretations, all material is advisory or Comments or questions should be directed to the staff by: informational in nature and should not be construed to have • Emailing: [email protected] regulatory effect. -
Airframes and Systems
Airframes and Systems I. Fuselage II. Cockpit and Cabin Window III. Wing IV. Stabilizing surfaces V. Landing gear VI. Flight controls (construction and operation) VII. Hydraulics VIII. Air Driven System (Piston Engine) IX. Air Driven System (Turbo propeller And Jet Aircraft) X. Non-pneumatic operated de-ice and anti-ice systems XI. Fuel System Fuselage: 1.What are the most frequent used materials in a monocoque or semi-monocoque structure? A) Wood. B) Composite fibres. C) Aluminium or magnesium alloy. D) Steel. A framework of truss type fuselage is used in: A) Supersonic aircraft B) Medium range commuter type turbo-props C) Heavy wide bodied subsonic turbo-fan aircraft D) Light training aircraft mainly A semi-monocoque fuselage has... in the longitudinal direction. Together with the frames, they resist... moments and axial forces. The skin panels are loaded mainly in... A) Bars, buckling, bending. B) Stringers, bending, shear. C) Spars, torsion, shear. D) Stringers, bending, buckling. Aircraft structures consists mainly of: A) Magnesium alloy sheets with aluminium rivets and titanium or steel at points requiring high strength. B) Light alloy steel sheets with copper rivets and titanium or steel materials at points requiring high strength. C) Aluminium alloy sheets and rivets with titanium or steel materials at points requiring high strength. D) Aluminium sheets and rivets with titanium or steel materials at points requiring high strength. What is the purpose of the stringers? A) To absorb the torsional and compressive stresses. B) To support the primary control surfaces. C) To produce stress risers. D) To prevent buckling and bending by supporting and stiffening the skin. -

Aerospace Structures- an Introduction to Fundamental Problems Purdue University
2011 Aerospace Structures- an Introduction to Fundamental Problems Purdue University This is an introduction to aerospace structures. At the end of one semester, we will understand what we mean by the “structures job” and know the basic principles and technologies that are at the heart of aerospace structures design and analysis. This knowledge includes basic structural theories, how to choose materials and how to make fundamental design trades, make weight estimates and provide information for decisions involved in successful aerospace structural design and development. Dr. Terry A. Weisshaar, Professor Emeritus School of Aeronautics and Astronautics Purdue University 7/28/2011 Preface leaves of absence at M.I.T., the Air Force For all of my 40 year plus career in aerospace Research Laboratory and at the Defense engineering I have been fascinated by design Advanced Research Agency (DARPA). I also and development of aerospace products and served as an advisor to the Air Force as part of fortunate to have participated in the the Air Force Scientific Advisory Board as well development of several of them. Design efforts, as serving on national panels. whether they are in the development of small components or large systems are at the heart of When I entered the working world (only briefly) the remarkable progress in aviation that has as a young engineer at Lockheed Missiles and occurred over the past 100 years. Space Company, the standard texts found on engineer‟s desk were the classic book by Bruhn To be a participant in this effort requires that one and the textbook by David Peery. -

Aviation Maintenance Alerts
ADVISORY CIRCULAR 43-16A AVIATION MAINTENANCE ALERTS ALERT AUGUST NUMBER 2006 337 CONTENTS AIRPLANES BEECH ........................................................................................................................................1 BOEING ......................................................................................................................................2 CESSNA ......................................................................................................................................3 DASSAULT...............................................................................................................................11 GULFSTREAM.........................................................................................................................13 LEARJET...................................................................................................................................13 ROCKWELL .............................................................................................................................14 AIR NOTES ELECTRONIC VERSION OF FAA FORM 8010-4, MALFUNCTION OR DEFECT REPORT ....................................................................................................................18 PAPER COPY OF FAA FORM 8010-4, MALFUNCTION OR DEFECT REPORT..............18 INTERNET SERVICE DIFFICULTY REPORTING (iSDR) WEB SITE...............................18 IF YOU WANT TO CONTACT US.........................................................................................19 AVIATION -
Our Complete List of Tools
Get in touch: [email protected] P/N Description Category (0.1840"X0.169") Piloted Reamer 3/16" (0.1840"x0.169") Reamer (0.2000"X0.184") Piloted Reamer 1stO/S (0.2000"x0.184") Reamer (0.2180"X0.201") Piloted Reamer 2ndO/S (0.2180"x0.201") Reamer (0.2470"X0.231") Piloted Reamer 1/4" (0.2470"x0.231") Reamer (0.2620"X0.246") Piloted Reamer 1stO/S" (0.2620"x0.246") Reamer (0.2780"X0.262") Piloted Reamer 2ndO/S (0.2780"X0.262") Reamer (0.3090"X0.293") Piloted Reamer 5/16" (0.3090"x0.293") Reamer (0.3240"X0.308") Piloted Reamer 1stO/S (0.3240"x0.308") Reamer (0.3400"X0.324") Piloted Reamer 2ndO/S (0.3400"x0.324") Reamer (NDT) 365 AFT ENG CONE BOLT, PT 4, 71-20-01 NDT (NDT) 505 REF STD, ENGINE STRUT & HEAT SHIELD BOND NDT (NDT)188A REF STD, GENERAL "AL" SURFACE HFEC NDT (NDT)356 REF STD, RIVET EDGE DIST FOR CHEM MILL P NDT 0,4062"-10,317MM Reamer 3/8" HSS-E Reamer 0,4219 Reamer 0,4219"-10,716mm Reamer 00162-150-000 Hoist-Mini Lift, R/I APU,THS ACT Lifting 00162-150-001 lifting beam Lifting 00408-029-000 Dynamometer 4000kg Dynamometer 00408-029-001 dynamometers 6000kg Dynamometer 00408-029-002 dynamometers 2000kg Dynamometer 00408-036-000 Load Cell Load Cell 00408-037-000 Load Cell Load Cell 00408-081-000 Load Cell Load Cell 00408-101-000 Load Cell Load Cell 010-0041 LOCATOR/POSITIONER TROMPETER 010-0041 Crimp Tools 0105598 SEARCH UNIT NDT 01-0597-00 SIMMONDS PRECISTION CAPACITANCE TESTER Test Set 0154GL5 TEMP ASSY ENGINE INLET Engine 017B012 UVe-LUX Meter NDT 02-127S02 Chucking Reamer Set Reamer 0226.04.31 Load cell, 63 kN Load Cell 0227.07.31 Load Cell 160kN Load Cell Get in touch: [email protected] 0227.07.31.