Aerospace Structures- an Introduction to Fundamental Problems Purdue University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Modeling an Airframe Tutorial
EAA SOLIDWORKS University p 1/11 Modeling an Airframe Tutorial Difficulty: Intermediate | Time: 1 hour As an Intermediate Tutorial, it is assumed that you have completed the Quick Start Tutorial and know how to sketch in 2D and 3D. If you struggle to recall how to do basic functions, please review the Tips Sheet. The Modeling an Airframe Tutorial guides you through the creation of a tubular airframe in SOLIDWORKS. The objective of the lesson is to teach you how to use the tools to design an aircraft frame. Time limits prevent us from completing this airframe, but you should learn the skills to model an airframe. You will create this part and drawing: This lesson includes: Creating a 3D Sketches Using the Weldment feature to add structural members Trimming structural members Creating a drawing and adding a ‘cut list’ Bill of Materials (BoM) EAA SOLIDWORKS University p 2/11 Modeling an Airframe Tutorial Creating a 3D Sketch for the Airframe In this lesson we will use the weldment feature to create an airframe. Weldments are structural members defined by a cross section picked from a library and a sketch line to define its length. This sketch line can be from multiple 2D sketches, or a single 3D sketch. By using two layout sketches (side and plan elevations), you can control the 3D sketch easily and any future changes will be reflected in your airframe. The layout sketches capture the design intent and the dimensions of the finished frame. 1. Open a New Part, verify Units are inches, and Save As “Airframe” (Top Menu / File / Save As). -

2020 Aerospace Engineering Major
Major Map: Aerospace Engineering Bachelor of Science in Engineering (B.S.E.) College of Engineering and Computing Department of Mechanical Engineering Bulletin Year: 2020-2021 This course plan is a recommended sequence for this major. Courses designated as critical (!) may have a deadline for completion and/or affect time to graduation. Please see the Program Notes section for details regarding “critical courses” for this particular Program of Study. Credit Min. Major ! Course Subject and Title Hours Grade1 GPA2 Code Prerequisites Notes Semester One (17 Credit Hours) ENGL 101 Critical Reading and Composition 3 C CC-CMW ! MATH 141 Calculus 13 4 C CC-ARP C or better in MATH 112/115/116 or Math placement test score CHEM 111 & CHEM 111L – General Chemistry I 4 C CC-SCI C or better in MATH 111/115/122/141 or higher math or Math placement test AESP 101 Intro. to Aerospace Engineering 3 * PR Carolina Core AIU4 3 CC-AIU Semester Two (18 Credit Hours) ENGL 102 Rhetoric and Composition 3 CC-CMW C or better in ENGL 101 CC-INF ! MATH 142 Calculus II 4 C CC-ARP C or better in MATH 141 CHEM 112 & CHEM 112L – General Chemistry II 4 PR C or better in CHEM 111, MATH 111/115/122/141 or higher math ! PHYS 211 & PHYS 211L – Essentials of Physics I 4 C CC-SCI C or better in MATH 141 EMCH 111 Intro. to Computer-Aided Design 3 * PR Semester Three (15 Credit Hours) ! EMCH 200 Statics 3 C * PR C or better in MATH 141 ! EMCH 201 Intro. -

Mcdonnell Douglas (Boeing) MD-83
Right MLG failure on landing, Douglas (Boeing) MD-83, EC-FXI Micro-summary: The right main landing gear of this Douglas (Boeing) MD-83 failed immediately on landing. Event Date: 2001-05-10 at 1232 UTC Investigative Body: Aircraft Accident Investigation Board (AAIB), United Kingdom Investigative Body's Web Site: http://www.aaib.dft.gov/uk/ Note: Reprinted by kind permission of the AAIB. Cautions: 1. Accident reports can be and sometimes are revised. Be sure to consult the investigative agency for the latest version before basing anything significant on content (e.g., thesis, research, etc). 2. Readers are advised that each report is a glimpse of events at specific points in time. While broad themes permeate the causal events leading up to crashes, and we can learn from those, the specific regulatory and technological environments can and do change. Your company's flight operations manual is the final authority as to the safe operation of your aircraft! 3. Reports may or may not represent reality. Many many non-scientific factors go into an investigation, including the magnitude of the event, the experience of the investigator, the political climate, relationship with the regulatory authority, technological and recovery capabilities, etc. It is recommended that the reader review all reports analytically. Even a "bad" report can be a very useful launching point for learning. 4. Contact us before reproducing or redistributing a report from this anthology. Individual countries have very differing views on copyright! We can advise you on the steps to follow. Aircraft Accident Reports on DVD, Copyright © 2006 by Flight Simulation Systems, LLC All rights reserved. -

3 Concepts of Stress Analysis
FEA Concepts: SW Simulation Overview J.E. Akin 3 Concepts of Stress Analysis 3.1 Introduction Here the concepts of stress analysis will be stated in a finite element context. That means that the primary unknown will be the (generalized) displacements. All other items of interest will mainly depend on the gradient of the displacements and therefore will be less accurate than the displacements. Stress analysis covers several common special cases to be mentioned later. Here only two formulations will be considered initially. They are the solid continuum form and the shell form. Both are offered in SW Simulation. They differ in that the continuum form utilizes only displacement vectors, while the shell form utilizes displacement vectors and infinitesimal rotation vectors at the element nodes. As illustrated in Figure 3‐1, the solid elements have three translational degrees of freedom (DOF) as nodal unknowns, for a total of 12 or 30 DOF. The shell elements have three translational degrees of freedom as well as three rotational degrees of freedom, for a total of 18 or 36 DOF. The difference in DOF types means that moments or couples can only be applied directly to shell models. Solid elements require that couples be indirectly applied by specifying a pair of equivalent pressure distributions, or an equivalent pair of equal and opposite forces at two nodes on the body. Shell node Solid node Figure 3‐1 Nodal degrees of freedom for frames and shells; solids and trusses Stress transfer takes place within, and on, the boundaries of a solid body. The displacement vector, u, at any point in the continuum body has the units of meters [m], and its components are the primary unknowns. -
Unit-1 Notes Faculty Name
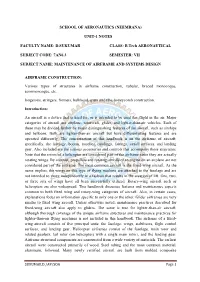
SCHOOL OF AERONAUTICS (NEEMRANA) UNIT-1 NOTES FACULTY NAME: D.SUKUMAR CLASS: B.Tech AERONAUTICAL SUBJECT CODE: 7AN6.3 SEMESTER: VII SUBJECT NAME: MAINTENANCE OF AIRFRAME AND SYSTEMS DESIGN AIRFRAME CONSTRUCTION: Various types of structures in airframe construction, tubular, braced monocoque, semimoncoque, etc. longerons, stringers, formers, bulkhead, spars and ribs, honeycomb construction. Introduction: An aircraft is a device that is used for, or is intended to be used for, flight in the air. Major categories of aircraft are airplane, rotorcraft, glider, and lighter-than-air vehicles. Each of these may be divided further by major distinguishing features of the aircraft, such as airships and balloons. Both are lighter-than-air aircraft but have differentiating features and are operated differently. The concentration of this handbook is on the airframe of aircraft; specifically, the fuselage, booms, nacelles, cowlings, fairings, airfoil surfaces, and landing gear. Also included are the various accessories and controls that accompany these structures. Note that the rotors of a helicopter are considered part of the airframe since they are actually rotating wings. By contrast, propellers and rotating airfoils of an engine on an airplane are not considered part of the airframe. The most common aircraft is the fixed-wing aircraft. As the name implies, the wings on this type of flying machine are attached to the fuselage and are not intended to move independently in a fashion that results in the creation of lift. One, two, or three sets of wings have all been successfully utilized. Rotary-wing aircraft such as helicopters are also widespread. This handbook discusses features and maintenance aspects common to both fixed wing and rotary-wing categories of aircraft. -

THE BIRTH of the ATLANTIC AIRLINER Part Iva The
THE BIRTH OF THE ATLANTIC AIRLINER (1920-1940) by Rit Staalman Part IVa The Ultimate Propeller Airliner SUMMING UP: 1. Required for an Atlantic Airliner: Low Own Weight (airframe + engines), High Load Capacity, Low Drag. 2. Suitable building material: Dur-Aluminum (favourable weight/strength + durability); suitable construction method: Semi-monocoque, i.e. skin takes part of load. 3. Design:: make wings as small as possible = high wing loads (see earlier). 4. Small wings decrease weight, also lower drag. They require airplane to fly at high speed. (For the Atlantic this is good, because the plane often has to battle high head winds.) High air speed implies that good aerodynamic form is needed. It also implies that high power is needed, especially at take- off with full load. 5. Powerful,/light-weight engines become available in the 1930’s (see appendix). 6.The various flight regimes (take-off, climbing, cruising with different weights) require propellers with adjustable blade angles. These also appear on the market in the same period. So at the beginning of World War II all elements are available for the construction of practical Atlantic airliners. 1930: AMERICA GOES MONO AND METAL 1 1. Boeing Founded by millionaire William Edward Boeing (1881-1956) in 1916 in Seattle, the first aircraft produced by Boeing Aircraft Co.were two biplanes on floats. In 1929 Boeing became part of United Aircraft and Transport until 1934, when the U.S. government ruled that the combination of aircraft factories and airlines was against the anti-trust laws. Claire Egtvedt was chief engineer from the start. -

Tilt Rotor Research Aircraft Familiarization Document
'. NASA TECHNICAL NASA TMX-62.407 MEMORANDUM -PTING Y. a c NASA/ARMY TILT ROTOR RESEARCH AIRCRAFT FAMILIARIZATION DOCUMENT Prepared by .Tilt Rotor Project Office .. .. -\ Coordinated by Martin Maid .. Ames Research Center ._ I rJ - ,.. -1 and , 1-1 c. U.S. Amy Air Mobility R&D Laboratory %\\-'?. \ Moffett Field, Calif. 94035 .-, 7 / --_ ---*_ c-, : January 1975 NASMARMY XV-15 TILT ROTOR RESEARCH AIRCRAFT FAMl LIARIZATION DOCUMENT Prepared by: Tilt Rotor Research Aircraft Project Office Staff Coordinated by: Martin D. Maisel Tilt Rotor Research Aircraft Project Office Approved by : - Dean C. Borgman Deputy Manager, Technical Tilt Rotor Research Aircraft Project Office David D. Few Manager Tilt Rotor Research Aircraft Project Office 1. Report No. 2. Ganmnmt hionNo. 3. Recipient's Catalog No. TM X-62,407 4. Titlr md Subtitlo 5. Rqwn D~te NASA/ARMY XV-15 TILT ROTOR RESEARCH AIRCRAFT FAMILIARIZATION DOCUMENT 7. Author(s) 8. PerformingOrgnizrtion Report No. Prepared by Tilt Rotor Project Office Staff, A-5870 coordinated by Martin Maisel 10. Work Unit No. 9. paforming ororriatia, "and MdNI 744-01-01 NASA Ames Research Center and 11. Canmct or Grant No. U.S. Army Air Mobility R&D Laboratory Moffett Field, Calif. 94035 13. Typ of RIpon and hid &ard 12. -nuring N.m md Addnr Technical Memorandum National Aeronautics and Space Administration 1;. Sponsoring Agmcy Code Washington, D.C. 20546 16. Abmrcr , The design features and general characteristics of the NASA/Army XV-15 Tilt Rotor Research Aircraft are described. This aircraft was conceived as a proof-of-concept vehicle and a V/STOL research tool for integrated wind tunnel, flight-simulation, and flight-test investigations. -
Structural Analysis
Module 1 Energy Methods in Structural Analysis Version 2 CE IIT, Kharagpur Lesson 1 General Introduction Version 2 CE IIT, Kharagpur Instructional Objectives After reading this chapter the student will be able to 1. Differentiate between various structural forms such as beams, plane truss, space truss, plane frame, space frame, arches, cables, plates and shells. 2. State and use conditions of static equilibrium. 3. Calculate the degree of static and kinematic indeterminacy of a given structure such as beams, truss and frames. 4. Differentiate between stable and unstable structure. 5. Define flexibility and stiffness coefficients. 6. Write force-displacement relations for simple structure. 1.1 Introduction Structural analysis and design is a very old art and is known to human beings since early civilizations. The Pyramids constructed by Egyptians around 2000 B.C. stands today as the testimony to the skills of master builders of that civilization. Many early civilizations produced great builders, skilled craftsmen who constructed magnificent buildings such as the Parthenon at Athens (2500 years old), the great Stupa at Sanchi (2000 years old), Taj Mahal (350 years old), Eiffel Tower (120 years old) and many more buildings around the world. These monuments tell us about the great feats accomplished by these craftsmen in analysis, design and construction of large structures. Today we see around us countless houses, bridges, fly-overs, high-rise buildings and spacious shopping malls. Planning, analysis and construction of these buildings is a science by itself. The main purpose of any structure is to support the loads coming on it by properly transferring them to the foundation. -

Real-Time Geopotentiometry with Synchronously Linked Optical Lattice Clocks
1 Real-time geopotentiometry with synchronously linked optical lattice clocks Tetsushi Takano1,2, Masao Takamoto2,3,4, Ichiro Ushijima2,3,4, Noriaki Ohmae1,2,3, Tomoya Akatsuka2,3,4, Atsushi Yamaguchi2,3,4, Yuki Kuroishi5, Hiroshi Munekane5, Basara Miyahara5 & Hidetoshi Katori1,2,3,4 1Department of Applied Physics, Graduate School of Engineering, The University of Tokyo, Bunkyo-ku, Tokyo 113-8656, Japan. 2Innovative Space-Time Project, ERATO, Japan Science and Technology Agency, Bunkyo-ku, Tokyo 113-8656, Japan. 3Quantum Metrology Laboratory, RIKEN, Wako-shi, Saitama 351-0198, Japan. 4RIKEN Center for Advanced Photonics, Wako-shi, Saitama 351-0198, Japan. 5Geospatial Information Authority of Japan, Tsukuba-shi, Ibaraki 305-0811, Japan. According to the Einstein’s theory of relativity, the passage of time changes in a gravitational field1,2. On earth, raising a clock by one centimetre increases its tick rate by 1.1 parts in 1018, enabling optical clocks1,3,4 to perform precision geodesy5. Here, we demonstrate geopotentiometry by determining the height difference of master and slave clocks4 separated by 15 km with uncertainty of 5 cm. The subharmonic of the master clock is delivered through a telecom fibre6 to phase- lock and synchronously interrogate7 the slave clock. This protocol rejects laser noise in the comparison of two clocks, which improves the stability of measuring the gravitational red shift. Such phase-coherently operated clocks facilitate proposals for linking clocks8,9 and interferometers10. Over half a year, 11 2 measurements determine the fractional frequency difference between the two clocks to be 1,652.9(5.9)×10-18, or a height difference of 1,516(5) cm, consistent with an independent measurement by levelling and gravimetry. -

Systems Engineering Essentials (In Aerospace)
Systems Engineering Essentials (in Aerospace) March 2, 1998 Matt Sexstone Aerospace Engineer NASA Langley Research Center currently a graduate student at the University of Virginia NASA Intercenter Systems Analysis Team Executive Summary • “Boeing wants Systems Engineers . .” • Systems Engineering (SE) is not new and integrates all of the issues in engineering • SE involves a life-cycle balanced perspective to engineering design and problem solving • An SE approach is especially useful when there is no single “correct” answer • ALL successful project team leaders and management employ SE concepts NASA Intercenter Systems Analysis Team Overview • My background • Review: definition of a system • Systems Engineering – What is it? – What isn’t it? – Why implement it? • Ten essentials in Systems Engineering • Boeing wants Systems Engineers. WHY? • Summary and Conclusions NASA Intercenter Systems Analysis Team My Background • BS Aerospace Engineering, Virginia Tech, 1990 • ME Mechanical & Aerospace Engineering, Manufacturing Systems Engineering, University of Virginia, 1997 • NASA B737 High-Lift Flight Experiment • NASA Intercenter Systems Analysis Team – Conceptual Design and Mission Analysis – Technology and Systems Analysis • I am not the “Swami” of Systems Engineering NASA Intercenter Systems Analysis Team Review: Definition of System • “A set of elements so interconnected as to aid in driving toward a defined goal.” (Gibson) • Generalized elements: – Environment – Sub-systems with related functions or processes – Inputs and outputs • Large-scale systems – Typically include a policy component (“beyond Pareto”) – Are high order (large number of sub-systems) – Usually complex and possibly unique NASA Intercenter Systems Analysis Team Systems Engineering is . • An interdisciplinary collaborative approach to derive, evolve, and verify a life-cycle balanced system solution that satisfies customer expectations and meets public acceptability (IEEE-STD-1220, 1994) • the absence of stupidity • i.e. -

Einstein's Gravitational Field
Einstein’s gravitational field Abstract: There exists some confusion, as evidenced in the literature, regarding the nature the gravitational field in Einstein’s General Theory of Relativity. It is argued here that this confusion is a result of a change in interpretation of the gravitational field. Einstein identified the existence of gravity with the inertial motion of accelerating bodies (i.e. bodies in free-fall) whereas contemporary physicists identify the existence of gravity with space-time curvature (i.e. tidal forces). The interpretation of gravity as a curvature in space-time is an interpretation Einstein did not agree with. 1 Author: Peter M. Brown e-mail: [email protected] 2 INTRODUCTION Einstein’s General Theory of Relativity (EGR) has been credited as the greatest intellectual achievement of the 20th Century. This accomplishment is reflected in Time Magazine’s December 31, 1999 issue 1, which declares Einstein the Person of the Century. Indeed, Einstein is often taken as the model of genius for his work in relativity. It is widely assumed that, according to Einstein’s general theory of relativity, gravitation is a curvature in space-time. There is a well- accepted definition of space-time curvature. As stated by Thorne 2 space-time curvature and tidal gravity are the same thing expressed in different languages, the former in the language of relativity, the later in the language of Newtonian gravity. However one of the main tenants of general relativity is the Principle of Equivalence: A uniform gravitational field is equivalent to a uniformly accelerating frame of reference. This implies that one can create a uniform gravitational field simply by changing one’s frame of reference from an inertial frame of reference to an accelerating frame, which is rather difficult idea to accept. -

The Birth of Powered Flight in Minnesota / Gerald N. Sandvick
-rH^ AEROPLANE AUTOMOBILE MOTORCYCLE RACES il '^. An Event in the History of the Northwest-Finish Flight by Aeroplanes GLEN H. CURTISS and Seat> for 25,000 People at these Price* 'ml Tu'Wly •nvi>n Bou-a nr Otaod HtiiiKl T(o BARNEY OLDFIELD DON'T MISS IT F IniiiKp at (Irnnd HUnd Bpxti .... UD wbo have tnvclcd fMter than any othrr lium«ii hrintrn A MaKnili'-fi" Pronrtun-.t llinb Spctd F.viutft. Not a I'ull Monn.-iit G :l•"^ <n Mill) ttn rolu diiyi. Jiiiir ^i. 'iX it. Sb $SO.M in k rKRc from Start to Khiifth. Tlie latttt-st Aeropbinf. tlic K.isH-i.t Aiito Car, \ii'imin><-l'». iiineial ulmliminu. lio>, pukMl in ptrblns the Fu.^iest }|orst.' PitTeiJ AKanisi V.ach Otlur In H Gr«siil Triple Kacfl >ii-"lnii pm ant (ocnipim nr iLiii>ri'iiplM) BOC AEROPLANE vs. AUTOMOBaE K(>*prT>-il Urn'a en 8<ila, Hli>ii<Miyo11>, Mctre^llao UvMc Co., 41 OIdfl«i(i. with bu llghlr.inj Ben; r»r. ^nd Kimrbirr. BIKili ttu^'-i nnut). •)• r>U, Wir^ke « DfWTT. PltUl Ud Bohert. wUb bU DuTtcq ckr, bgalnit world t rn^'irds on » iir VxT .-•n.-xil iilnnuti.-n mrtrnr. WnlUr B Wllmot. OMWtkl outar tfftck WALTER R. WILMOT. General Mqr. M.u.k.. %:. iii.i llmi-r, Miiiiif.'MI* T 0 Phooe, ABHM IT*. THE BIRTH OF POWERED FLIGHT IN MINNESOTA Gerald N. Sandvick AVIATION in Minnesota began in the first decade of the Aviation can be broadly divided into two areas: aero 20th century.