9-TOACSJ- Guo Xinjun MS (SE512029)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Income? Bisone
INCOME? BISONE ED 179 392 SP 029 296 $ AUTHOR Hamilton, Howard B. TITLE Problem Manual for Power Processiug, Tart 1. Electric Machinery Analysis. ) ,INSTITUTION Pittsbutgh Univ., VA. 51'014 AGENCY National Science Foundation, Weeshingtcni D.C. PUB DATE -70 GRANT NSF-GY-4138 NOTE 40p.; For_related documents', see SE 029 295-298 EDRS PRICE MF01/BCO2 Plus Postage. DESCRIPTORS *College Science: Curriculum Develoimeft: Electricity: Electromechanical lacshnology;- Electfonics: *Engineering Educatiob: Higher Education: Instructional Materials: *Problem Solving; Science CourAes:,'Science Curriculum: Science . Eductttion; *Science Materials: Scientific Concepts AOSTRACT This publication was developed as aPortion/ofa . two-semester se4uence commencing t either the-sixth cr seVenth.term of the undergraduate program in electrical engineering at the University of Pittsburgh. The materials of tfie two courses, produced by' National Science Foundation grant, are concernedwitli power con ion systems comprising power electronic devices, electromechanical energy converters, and,associnted logic configurations necessary to cause the systlp to behave in a, prescrib,ed fashion. The erphasis in this portion of the'two course E` sequende (Part 1)is on electric machinery analysis.. 7his publication is-the problem manual for Part 1, which provide's problems included in 4, the first course. (HM) 4 Reproductions supplied by EDPS are the best that can be made from the original document. * **************************v******************************************** 2 -

Serial Step up Resonant Frequency Static Discharge System - Tesla Gun
International Journal of Pure and Applied Mathematics Volume 114 No. 7 2017, 531-546 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Special Issue ijpam.eu Serial Step Up Resonant Frequency Static Discharge System - Tesla Gun R. Ramya1, Abhinash Kumar Patra2, Saurodeep Adhikary3, Rishav Ranjan Paul4 SRM University, Kattankulathur [email protected] and [email protected] Abstract Currently weapons research and development takes up the greatest share of any defense budget. In this aspect, India is lagging, mostly due to economical and institutional constraints. It is the largest importer of arms and ammunitions in the world. However, there is still a need for a failsafe defense system. This paper is a step towards addressing this shortcoming of the Indian military. However, this is not the first prototypal weapons system in the world. The U.S. Defense Strategic Defense Initiative put into development the technology of a similar type using a particle beam to be used as a weapon in outer space as part of the Beam Experiments Aboard Rocket (BEAR) project. This is the next step to build a weapon system that rises above ammunition constraint and environmental hazard. The basic premise of a Tesla Gun involves static discharge at a very high voltage. There are three main elements of the system. The first is the voltage step up. The next is the resonant circuit and the final element is the targeting system. Key Words and Phrases: Tesla Coil, Static Discharge, Resonant Frequency, Bounces. 1. Introduction 1 531 International Journal of Pure and Applied Mathematics Special Issue A Tesla coil is a device producing a high frequency current, at a very high voltage but of relatively small intensity. -

A Comparative Study of Methods for Calculating AC Winding Losses in Permanent Magnet Machines
A Comparative Study of Methods for Calculating AC Winding Losses in Permanent Magnet Machines Narges Taran Vandana Rallabandi Dan M. Ionel SPARK Lab, ECE Dept. SPARK Lab, ECE Dept. SPARK Lab, ECE Dept. University of Kentucky University of Kentucky University of Kentucky Lexington, KY, USA Lexington, KY, USA Lexington, KY, USA [email protected] [email protected] [email protected] Greg Heins Dean Patterson Regal Beloit Corp. Regal Beloit Corp. Research and Development Research and Development Rowville, VIC, Australia Rowville, VIC, Australia [email protected] [email protected] Abstract—In this study different methods of estimating the are discussed. The additional conductor loss caused by rotor additional ac winding loss due to eddy currents at open-circuit PMs is more significant in case of open slot machines, due are explored. A comparative study of 2D and 3D FEA, and to the increased leakage flux, and an extreme case occurs for hybrid numerical and analytical methods is performed in order to recommend feasible approaches to be employed. Axial flux air cored machines where the stator core is eliminated and all permanent magnet (AFPM) machine case studies are included, conductors are exposed to the air gap flux density. namely a machine with open slots and a coreless configuration. Several authors have analytically estimated the additional These machine topologies are expected to present a substantial amount of ac winding loss, which would therefore need to ac copper loss [1], [4]–[8]. Two–dimensional FEA is used be considered during optimal design. This study is one of in many studies [9]–[12] while 3D FEA has been employed the first ones to compare meticulous 3D FEA models with only very recently in few works [3], [13]. -

Modelling of Iron Losses of Permanent Magnet Synchronous Motors
MODELLING OF IRON LOSSES OF PERMANENT MAGNET SYNCHRONOUS MOTORS Chunting Mi A thesis submitted in confollILity with the requirements for the Degree of Doctor of Philosophy in the Department of EIectncal and Computer Engineering University of Toronto O Copyright by Chunting Mi, 200 1 The author has pteda non- L'auteur a accordé une Licence non exclusive licence dowing the exclusive permettant à la National Li* of Canada to Bibliothèque nationde du Canada de reproduce, Ioan, distnbute or sell reproduire, prêter, distriilmer ou copies of this thesis in microform, vendre des copies de cette thèse sous paper or eIectronic formats. la forme de microfiche/film, de reproduction sur papier ou sur format electronique. The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qai protège cette thèse. thesis nor substantial extracts fiom it Ni la thèse ni des extraits substantiels may be printed or otherwise de celle-ci ne doivent être imprimés reprodnced without the author's ou autrement reproduits sans son pdssi01l. autorisation. MODELLING OF IRûN LOSSES OF PERMANENT MAGNET SYNCHRONOUS MOTORS Chunting Mi A thesis submitted in conformity with the requUements for the De- of Doctor of Philosophy in the Department of Electrical and Computer Engineering University of Toronto @ Copyright by Chunting Mi, 200 1 ABSTRACT This thesis proposes a refïned approach to evaluate iron losses of surface-mounted permanent magnet (PM) synchronous motors. PM synchronous moton have higher efficiency than induction machines with the same &me and same power ratnigs. However, in PM synchronous motors, iron Iosses form a larger portion of the total losses than in induction machines. -

RESISTANCE of COIL 1 Temperature Effects
Chapter 6—Resistance of Coil 6–1 RESISTANCE OF COIL The resistance RTC in the RLC model is an effective or equivalent resistance which rep- resents all the losses in the Tesla coil. It includes 1. Ohmic or copper losses 2. Dielectric losses, coil form and conductor insulation 3. Eddy current losses in toroid, strike ring, and soil 4. Radiation losses 5. Losses in the spark It is surprising how difficult it is to calculate these various losses. Making meaningful measurements can also be challenging. If we operate at low input voltage so we are below spark breakout, then we can ignore the last term for the moment. I will ramble through some considerations for the other losses. 1 Temperature Effects Almost all coils are wound with copper wire. It is moderately priced and widely available. There might be an occasional aluminum coil, usually from some ‘bargain’ at a surplus auction. Aluminum has higher resistivity than copper, so to get a given resistance the wire must be physically larger. We saw earlier that to get a high toroid voltage we needed a coil with large L and/or small R. If we use larger wire to keep the resistance the same, the coil must be physically larger and the inductance will decrease. We would expect therefore that aluminum coils would always be inferior to copper coils. Example You are given a choice between two spools of magnet wire, each 1000 feet in length. The copper is 24 gauge, with nominal resistance 25.67 Ω, while the aluminum is 22 gauge, with nominal resistance 26.46 Ω. -
Matched Transformers for Synchro and Resolver Applications
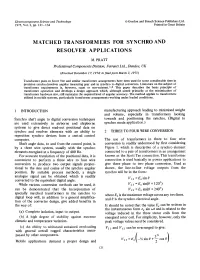
Electrocomponent Science and Technology (C) Gordon and Breach Science Publishers Ltd. 1975, Vol. 2, pp. 121-134 Printed in Great Britain MATCHED TRANSFORMERS FOR SYNCHRO AND RESOLVER APPLICATIONS M. PRATT Professional Components Division, Ferranti Ltd., Dundee, UK (Received December 17; 1974; in final form March 3, 1975) Transformer pairs in Scott Tee and similar transformer arrangements have been used for some considerable time in precision synchro/resolver angular measuring gear and in synchro to digital converters. Literature on the subject of transformer requirements is, however, scant or non-existent.I, 2 This paper describes the basic principle of transformer operation and develops a design approach which, although aimed primarily at the minimisation of transformer hardware size, still maintains the required level of angular accuracy. The method applies to transformers utilised in mobile systems, particularly transformer arrangements working under loaded conditions. INTRODUCTION manufacturing approach leading to minimised weight and volume, especially in transformers looking Synchro shaft angle to digital conversion techniques towards and positioning the synchro. (Digital to are used extensively in airborne and shipborne synchro mode application.) systems to give direct read-out positional data on synchro and resolver elements with an ability to 2 THREE TO FOUR WIRE CONVERSION reposition synchro devices from a central control computer. The use of transformers in three to four wire Shaft angle data, to and from the control point, is conversion is readily understood by first considering by a three wire system, usually with the synchro Figure 1. which is descriptive of a synchro element elements energised at a frequency of 400 Hz. -

Abstract Transformer Design for Dual Active Bridge
ABSTRACT TRANSFORMER DESIGN FOR DUAL ACTIVE BRIDGE CONVERTER by Egor Iuravin Power transformers have a long history which takes root in 19th century when Michael Faraday introduced the definition of the electromagnetic induction. In the beginning of the 1960s, there was a tendency to increase the frequency of switch mode power supplies. This thesis provides the detailed summary of operating principles, design, simulation and experimental analysis of high frequency power transformers. The focus of this research is to find an optimal transform solution for the DAB converter operating at a power level of 2 kW. Furthermore, the investigation will be carried out to estimate and measure the contact loss of a transformer. TRANSFORMER DESIGN FOR DUAL ACTIVE BRIDGE CONVERTER A Thesis Submitted to the Faculty of Miami University in partial fulfillment of the requirements for the degree of Master of Science in Computational Science and Engineering by Egor Iuravin Miami University Oxford, Ohio 2018 Advisor: Dr. Mark J. Scott Reader: Dr. Haiwei Cai Reader: Dr. Dmitriy Garmatyuk ©2018 Egor Iuravin This Thesis titled TRANSFORMER DESIGN FOR DUAL ACTIVE BRIDGE CONVERTER by Egor Iuravin has been approved for publication by College of Engineering and Computing and Department of Electrical and Computer Engineering ____________________________________________________ Dr. Mark J Scott ______________________________________________________ Dr. Haiwei Cai _______________________________________________________ Dr. Dmitriy Garmatyuk Table of Contents 1. Introduction -

Neda Shahabi Ghahfarokhi Thesis (PDF 1MB)
Minimising Capacitive Couplings and Distributing Copper Losses in Planar Magnetic Elements This thesis is submitted in partial fulfilment of requirements for the degree of Master of Engineering Neda Shahabi Ghafarokhi (B.Eg) Engineering systems/Built Environment and Engineering DECEMBER 2010 STATEMENT OF ORIGINAL AUTHOUSHIP The work submitted in this thesis, has not been previously published for a degree or diploma, at any other education institution. To the best of my knowledge and belief the materials contained in this thesis are belongs to the author except from the referenced subjects. Neda Shahabi Ghahfarokhi Date ACKNOWLDGMENTS I express my gratitude to my supervisor Associated Professor Firuz Zare for his continuous guidance and financial support over this work. I express my sincere thanks to my beloved husband, Arash, for his great assistance, encouragement and advices during this research. Finally I dedicate this trivial work to my dear parents for their infinite love and support. ABSTRACT Planar magnetic elements are becoming a replacement for their conventional rivals. Among the reasons supporting their application, is their smaller size. Taking less bulk in the electronic package is a critical advantage from the manufacturing point of view. The planar structure consists of the PCB copper tracks to generate the desired windings .The windings on each PCB layer could be connected in various ways to other winding layers to produce a series or parallel connection. These windings could be applied coreless or with a core depending on the application in Switched Mode Power Supplies (SMPS). Planar shapes of the tracks increase the effective conduction area in the windings, brings about more inductance compared to the conventional windings with the similar copper loss case. -

A Study of Life Time Management of Power Transformers at E. ON's
A study of life time management of Power Transformers at E. ON’s Öresundsverket, Malmö Chaitanya Upadhyay June 2011 Supervisors: Jonas Stenlund, E.ON Värmekraft Olof Samuelsson, LTH Examiner: Gunnar Lindstedt, LTH Preface This Master’s Thesis was carried out at E.ON Värmekraft, Öresundsverket in Malmö in cooperation with Division of Industrial Engineering and Automation at Faculty of Engineering at Lund University. This work is the final part of my master’s degree in electrical engineering. During this project, I have got quite a lot support and help and first of all would like to thank E.ON Värmekraft for giving the opportunity to carry out this project. I would also like to thank my supervisors, Jonas Stenlund at E.ON Värmekraft and Olof Samuelsson at the Division of Industrial Electrical Engineering and Automation, LTH for their help and support. I would like to further thanks to Mårten Svensson at Vattenfall, Mark Wilkensson at SMIT transformer, ABB power transformers team and many more who took their precious time to help and guide in this project. Chaitanya Upadhyay Malmö, June 2011. Abstract The objective of this master thesis is to review the present and future condition of generator step up power transformers at the combined heat and power plant Öresundsverket, in Malmö. The objective of this work was to prolong the lifetime of power transformers at Öresundsverket. The thermal properties of power transformer are been taking into consideration for their life time assessment. The most suitable thermal model was chosen which can prolong life to these transformers in the future. -

Synchronous Motor
CHAPTER38 Learning Objectives ➣ Synchronous Motor-General ➣ Principle of Operation ➣ Method of Starting SYNCHRONOUS ➣ Motor on Load with Constant Excitation ➣ Power Flow within a Synchronous Motor MOTOR ➣ Equivalent Circuit of a Synchronous Motor ➣ Power Developed by a Synchronous Motor ➣ Synchronous Motor with Different Excitations ➣ Effect of increased Load with Constant Excitation ➣ Effect of Changing Excitation of Constant Load ➣ Different Torques of a Synchronous Motor ➣ Power Developed by a Synchronous Motor ➣ Alternative Expression for Power Developed ➣ Various Conditions of Maxima ➣ Salient Pole Synchronous Motor ➣ Power Developed by a Salient Pole Synchronous Motor ➣ Effects of Excitation on Armature Current and Power Factor ➣ Constant-Power Lines ➣ Construction of V-curves ➣ Hunting or Surging or Phase Swinging ➣ Methods of Starting ➣ Procedure for Starting a Synchronous Motor Rotary synchronous motor for lift ➣ Comparison between Ç Synchronous and Induction applications Motors ➣ Synchronous Motor Applications 1490 Electrical Technology 38.1. Synchronous Motor—General A synchronous motor (Fig. 38.1) is electrically identical with an alternator or a.c. generator. In fact, a given synchronous machine may be used, at least theoretically, as an alternator, when driven mechanically or as a motor, when driven electrically, just as in the case of d.c. machines. Most synchronous motors are rated between 150 kW and 15 MW and run at speeds ranging from 150 to 1800 r.p.m. Some characteristic features of a synchronous motor are worth noting : 1. It runs either at synchronous speed or not at all i.e. while running it main- tains a constant speed. The only way to change its speed is to vary the supply frequency (because Ns = 120 f / P). -
Electrical Engineering
ESE-2016 Answer key of (Objective Paper-II) Electrical Engineering solutions Answer Key of Electrical Engg. Objective Paper-II (ESE - 2016) SET - A 1. Compared to the salient-pole Hydroelectric 4. The regulation of a transformer in which ohmic generators, the steam and the gas-turbine have loss is 1% of the output and reactance drop is cylindrical rotors for 5% of the voltage, when operating at 0.8 power factor lagging, is (a) Better air-circulation in the machine (a) 3.8% (b) 4.8% (b) Reducing the eddy-current losses in the rotor (c) 5.2% (d) 5.8% (c) Accommodating larger number of turns in Sol. (a) the field winding 5. In a power transformer, the core loss is 50 W (d) Providing higher mechanical strength at 40 Hz and 100 W at 60 Hz, under the against the centrifugal stress condition of same maximum flux density in both Sol. (d) cases. The core loss at 50 Hz will be 2. Consider the following losses for short circuit (a) 64 W (b) 73 W test on a transformer: (c) 82 W (d) 91 W 1. Copper loss Sol. (b) 2. Copper and iron losses 6. Consider the following advantages of a 3. Eddy current and hysteresis losses distributed winding in a rotating machine: 4. Friction and windage losses 1. Better utilization of core as a number of evenly placed small slots are used Which of the above is/are correct ? 2. Improved waveform as harmonic emf’s are (a) 1 only (b) 2 only reduced (c) 3 only (d) 2, 3 and 4 3. -

Flux-Weakening Control Methods for Hybrid Excitation Synchronous Motor
ARCHIVES OF ELECTRICAL ENGINEERING VOL. 64(3), pp. 427-439 (2015) DOI 10.2478/aee-2015-0033 Flux-weakening control methods for hybrid excitation synchronous motor 1 1 2 1 1 1 HUANG MINGMING , GUO XINJUN , JIN PING , HUANG QUANZHEN , LIU YUPING , LI NA 1School of Electrical Information Engineering, Henan Institute of Engineering Zhengzhou, Henan 451191, China e-mail: [email protected] 2School of Energy and Electrical Engineering, Hohai University Nanjing 211100, China e-mail: [email protected] (Received: 27.10.2014, revised: 24.03.2015) Abstract: The hybrid excitation synchronous motor (HESM), which aim at combining the advantages of permanent magnet motor and wound excitation motor, have the charac- teristics of low-speed high-torque hill climbing and wide speed range. Firstly, a new kind of HESM is presented in the paper, and its structure and mathematical model are illustra- ted. Then, based on a space voltage vector control, a novel flux-weakening method for speed adjustment in the high speed region is presented. The unique feature of the proposed control method is that the HESM driving system keeps the q-axis back-EMF components invariable during the flux-weakening operation process. Moreover, a copper loss minimization algorithm is adopted to reduce the copper loss of the HESM in the high speed region. Lastly, the proposed method is validated by the simulation and the experimental results. Key words: hybrid excitation synchronous motor, wide speed range, vector control, flux- weakening control, current distributor 1. Introduction The hybrid excitation synchronous motor (HESM) which is a wide speed-range machine derived from the permanent magnet synchronous motor (PMSM), contains two coexisting excitation sources: permanent magnet and excitation winding.