Downwind Load Model for Rigs of Modern Sailing Yachts for Use in FEA
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

12.9 Gennaker February 2013 Setting up and Sailing with the 12.9 Gennaker
12.9 Gennaker February 2013 Setting up and sailing with the 12.9 Gennaker The 12.9 Gennaker is a new bigger gennaker for the Weta. The standard gennaker is 8 sqm and the 12.9 gennaker is 12.9 sqm. The sail is designed for light to moderate breezes to help sailors racing in mixed fleets to get to a downwind mark faster. It is not intended to replace the standard 8.0 gennaker and will be sold as an extra. It is intended that one design racing fleets will stick with the 8.0 gennaker. It’s hard to say exactly what the performance difference in the sails is as it changes for different wind strengths. But with the 12.9 sqm gennaker you can sail on a generally lower (more downwind) heading than you can with the 8.0 sqm gennaker. The biggest changes are seen in a steady light breeze before you can get the boat planing. So to put it very roughly if you have two boats, one with the 8.0 and one with the 12.9 and you point both boats in a hot/tight reaching angle the 8.0 will be faster for most conditions. If you then point both boats at a low/broad reaching angle the 12.9 will be faster in most conditions. So on a windy day someone might sail further but faster with the 8.0 and get to the mark quicker than someone with the 12.9 sail who is sailing slower but less distance. For instance when Chris and I were testing, we did a day on a lake. -

Equinox Manual
Racing Manual V1.2 January 2014 Contents Introduction ...................................................................................................................................... 3 The Boat ........................................................................................................................................ 3 Positions on a Sigma 38 ................................................................................................................. 4 Points of Sail .................................................................................................................................. 5 Tacking a boat ............................................................................................................................... 6 Gybing a boat ................................................................................................................................ 7 Essential knots all sailors should know ............................................................................................... 8 Bowline ......................................................................................................................................... 8 Cleat Knot ..................................................................................................................................... 8 Clove Hitch ................................................................................................................................... 8 Reef Knot...................................................................................................................................... -

Boom Vang Rigging
Congratulations! You purchased the best known and best built pocket cruising vessels available. We invite you to spend a few moments with the following pages to become better acquainted with your new West Wight Potter. If at any point we can assist you, please call 800 433 4080 Fair Winds International Marine Standing Rigging The mast is a 2” aluminum extrusion with a slot on the aft side to which the sail’s boltrope or mainsail slides (options item) enter when hoisting the main sail. Attached to the mast will be two side stays, called Shrouds, and a Forestay. These three stainless cables represent the standing rigging of the West Wight Potter 15. The attachment points for the shroud adjusters are on the side of the deck. Looking at the boat you will find ¼” U-Bolts mounted through the deck on either side of the boat and the adjuster goes over these U-Bolts. Once the shroud adjuster slides in, the clevis pin inserts through the adjuster and is held in place with a lock ring. When both side stays are in place we move onto the mast raising. Mast Raising First, remove the mast pin holding the mast base in the bow pulpit. Second, move the mast back towards the mast step on the cabin top of the boat and pin the mast base into the aft section of the mast step (the mast step is bolted onto the cabin top of the boat). The mast crutch on the transom of the boat will support the aft end of the mast. -

Masts & Rigging
Masts & Rigging By Ralf Morgan Standing Rigging Careful inspection and preparation of the spars and rigging is essential prior to any voyage offshore. Embarking on the Pacific Cup is an undertaking that is likely to be the equivalent of many years of use for the average boat. To put this into perspective, sailing the Pacific Cup is the equivalent distance as sailing from the Blackhaller Buoy to the Blossom Rock Buoy 679.8 times. Many Bay sailors have not done that in a lifetime. Now, if you decide you are going to sail back too……. Many aspects of inspection and preparation are common to all sailboat rigs regardless of construction or type. If the owner/skipper has not taken the opportunity to do a careful inspection of the rig in the past three years, it makes a lot of sense to pull the rig and go over it very carefully. There are areas of the rig that can really only be inspected and serviced when it is not under tension. There are other items that are just easier to do on the ground. While the rig is down, become intimately familiar with it. Take some digital photos of key components. Remember that two in the morning during a driving squall, is not the optimal time to gain familiarity with your rig! 1) Starting at the bottom and working up: the first thing to inspect is the actual mast base. This includes both the mast tube and the mast step. On aluminum spars you should be most concerned about corrosion and electrolysis. -
Sail Tuning Guide LINK
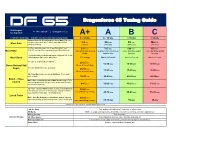
DF 65 Dragonforce 65 Tuning Guide Phil Burgess M - 0413 200 608 E - [email protected] 1st July 2020 A+ A B C Estimated wind range - depends on wave action and tacking ability 0 - 10 kts 8 - 15 kts > 15 kts > 20 kts Distance from Jib Pivot Eyelet to front of Mast (Can also use gate control as a ram to induce mast bend without line 4th Line Line Aft Mast Gate 3rd 5th Max changing forestay). (175 mm) (176 mm) (177 mm) (178 mm) A+ From backstay crane hole to top of backstay hook 951 mm. 785 mm. 698 mm. 620 mm. A, B, C From top of Forestay tang to top of backstay hook. Mast Rake From soft to firm as wind Slightly firmer backstay & Firmer backstay & tight Firmer backstay & tight builds tight forestay forestay forestay Tension Backstay so Mast bend matches Mainsail luff, so sail Mast Bend easily flops from side to side when tilted Soft settings Match luff round Match luff round Match luff round At centre of Jib Boom deepest point 20-25 mm, 15-20 mm 15-20 mm 10-15 mm Boom Outhaul Sail 15 mm at top of range At centre of Main Boom deepest point Depth 25-30 mm, 15-25 mm 15-20 mm 10-20 mm 15 mm at top of range Jib - from Mast centre to end of Jib Boom. Place small mark on deck 38-43 mm 40-45mm 40-45mm 40-45mm Boom - Close Main - from centreline at end of Main Boom. (Adjust Tx for hauled exponential adjustment for last 20 mm sheet travel for high and low pointing mode) 8-15 mm 10-20 mm 15-25 mm 15-25 mm Jib - from Centre of Mast to leech at mid point of jib leech. -

Sail Trimming Guide for the Beneteau 37 September 2008
INTERNATIONAL DESIGN AND TECHNICAL OFFICE Sail Trimming Guide for the Beneteau 37 September 2008 © Neil Pryde Sails International 1681 Barnum Avenue Stratford, CONN 06614 Phone: 203-375-2626 • Fax: 203-375-2627 Email: [email protected] Web: www.neilprydesails.com All material herein Copyright 2007-2008 Neil Pryde Sails International All Rights Reserved HEADSAIL OVERVIEW: The Beneteau 37 built in the USA and supplied with Neil Pryde Sails is equipped with a 105% non-overlapping headsail that is 337sf / 31.3m2 in area and is fitted to a Profurl C320 furling unit. The following features are built into this headsail: • The genoa sheets in front of the spreaders and shrouds for optimal sheeting angle and upwind performance • The size is optimized to sheet correctly to the factory track when fully deployed and when reefed. • Reef ‘buffer’ patches are fitted at both head and tack, which are designed to distribute the loads on the sail when reefed. • Reefing marks located on the starboard side of the tack buffer patch provide a visual mark for setting up pre-determined reefing locations. These are located 508mm/1’-8” and 1040mm / 3’-5” aft of the tack. • A telltale ‘window’ at the leading edge of the sail located about 14% of the luff length above the tack of the sail and is designed to allow the helmsperson to easily see the wind flowing around the leading edge of the sail when sailing upwind and close-hauled. The tell-tales are red and green, so that one can quickly identify the leeward and weather telltales. -
The X-99 International Class Rules and Constitution 2001 Edition
The X-99 International Class Rules and Constitution 2001 Edition Revision following International Meeting of 4 November 2000 CONSTITUTION RULES 1. GENERAL 2. MEASUREMENT & MEASURERS 3. HULL 4. KEEL 5. RUDDER 6. MAST 7. BOOM 8. SPINNAKER POLE 9. STANDING RIGGING 10. RUNNING RIGGING 11. SAILS 12. SETTING OF SAILS 13. SAFETY EQUIPMENT 14. CREW LIMITS 15 ACCOMMODATION 16. ELECTRICS 17. DECK 18. MISCELLANEOUS 19. ENGINE 20. LIST OF DRAWINGS CONSTITUTION 1. NAME The name of the Association shall be THE X-99 INTERNATIONAL CLASS ASSOCIATION. 2. INSIGNIA The emblem of the class shall be the recognised 99 symbol as per Drawing No. 10. 3. OBJECTS The objects of the Association are: (A+B) 3.1 (A) To provide a medium of exchange of information among National X-99 classes and to enhance the enjoyment and fairness of racing these sailboats. 3.1 (B) To promote and develop X-99 class racing in all countries under uniform rules. 4. POLICY It shall be the policy of the Association to maintain the X-99 as a one-design yacht. 5. JURISDICTION The International Authority of the Class shall be the X-99 International Class Association in cooperation with the Offshore Racing Council and International Sailing Federation. 6. LANGUAGE The official language of the class is English and in the event of any dispute over translation the English text shall prevail. 7. MEMBERSHIP 7.1 The members of the Association shall be every recognised National X-99 Association and X-Yachts. Each National Association shall have two votes plus one vote per each 15 yachts registered, rounded to the nearest multiple of 15; X-Yachts shall have the average of the current votes of all the National Associations, rounded to the nearest multiple of 15. -

Hydraulic Boom Vang
1 597-201-E 2014-01-07 Hydraulic boom vang 2 General / The manual To derive the maximum benefit and enjoyment from your Seldén Hydraulic Boom Vang, we recommend that you study this manual carefully. Selden limited warranty applies to this product. For full details please see our general conditions of sale. The guarantee is only valid if the Vang is installed and operated in accordance with this manual. If the Vang is repaired by anyone not authorized by Seldén Mast AB ,the guarantee ceases to be valid. Seldén Mast AB reserves the right to alter the content of the manual and design of the product without prior warning. For latest update check www.seldenmast.se or contact Seldén for your own issue. This symbol denotes safety related information Please follow Selden 595-540 “Hints and Advice” on rigging and tuning masts. Product Description / Information The Selden hydraulic boom vang is intended for use on a sailing boat as an aid to control the boom vertically. It needs to be connected to a hydraulic system that has a pump station and a holding tank. When pressurized the boom vang will contract and pull the boom downwards. The hydraulic system shall have a release valve that can release the pressure and let oil return to the tank. The internal gas pressure will then extend the vang so that it acts as a support to the boom, pushing it upwards. Cover: 6mm Allen screw Gas fill connection: ¼” BSPP Thread plus flat surface for seal washer The vang is filled with nitrogen gas to the correct pressure whe delivered from Selden. -

Coast Guard Cutter Seamanship Manual
U.S. Department of Homeland Security United States Coast Guard COAST GUARD CUTTER SEAMANSHIP MANUAL COMDTINST M3120.9 November 2020 Commandant US Coast Guard Stop 7324 United States Coast Guard 2703 Martin Luther King Jr. Ave SE Washington, DC 20593-7324 Staff Symbol: (CG-751) Phone: (202) 372-2330 COMDTINST M3120.9 04 NOV 2020 COMMANDANT INSTRUCTION M3120.9 Subj: COAST GUARD CUTTER SEAMANSHIP MANUAL Ref: (a) Risk Management (RM), COMDTINST 3500.3 (series) (b) Rescue and Survival Systems Manual, COMDTINST M10470.10 (series) (c) Cutter Organization Manual, COMDTINST M5400.16 (series) (d) Naval Engineering Manual, COMDTINST M9000.6 (series) (e) Naval Ships' Technical Manual (NSTM), Wire and Fiber Rope and Rigging, Chapter 613 (f) Naval Ships’ Technical Manual (NSTM), Mooring and Towing, Chapter 582 (g) Cutter Anchoring Operations Tactics, Techniques, and Procedures (TTP), CGTTP 3-91.19 (h) Cutter Training and Qualification Manual, COMDTINST M3502.4 (series) (i) Shipboard Side Launch and Recovery Tactics, Techniques, and Procedures (TTP), CGTTP 3-91.25 (series) (j) Shipboard Launch and Recovery: WMSL 418’ Tactics, Techniques, and Procedures (TTP), CGTTP 3-91.7 (series) (k) Naval Ships’ Technical Manual (NSTM), Boats and Small Craft, Chapter 583 (l) Naval Ship’s Technical Manual (NSTM), Cranes, Chapter 589 (m) Cutter Astern Fueling at Sea (AFAS) Tactics, Techniques, and Procedures (TTP), CGTTP 3-91.20 (n) Helicopter Hoisting for Non-Flight Deck Vessels, Tactics, Techniques, and Procedures (TTP), CGTTP 3-91.26 (o) Flight Manual USCG Series -
Beneteau Oceanis 38 Tuning Guide
INTERNATIONAL DESIGN AND TECHNICAL OFFICE Sail Trimming Guide for the Beneteau Oceanis 38 2015 Neil Pryde Sails International 1681 Barnum Avenue Stratford, CONN 06614 Phone: 203-375-2626 • Fax: 203-375-2627 Email: [email protected] Web: www.neilprydesails.com All material herein Copyright 2014-2015 Neil Pryde Sails International All Rights Reserved HEADSAIL OVERVIEW: The Oceanis 38 built in the USA and supplied with Neil Pryde Sails is equipped with a 105% overlapping headsail that is 353sf / 32.8m2 in area and is fitted to the Facnor LS165 furling unit. The sail is built using Challenge Sailcloth 7.38 dacron. The following features are built into this headsail: The genoa sheets in front of the spreaders and shrouds for optimal sheeting angle and upwind performance The size is optimized to sheet correctly to the factory track when fully deployed and when reefed. Reef ‘buffer’ patches are fitted at both head and tack, which are designed to distribute the loads on the sail when reefed. Reefing marks located on the starboard side of the tack buffer patch provide a visual mark for setting up pre-determined reefing locations. These are located 600mm/2ft and 1200mm /4ft aft of the tack. All seams double stitched in V-92 thread in a‘3-step’ stitch and in contrasting color to help identify damage thread. A telltale ‘window’ at the leading edge of the sail located about 14% of the luff length above the tack of the sail and is designed to allow the helmsperson to easily see the wind flowing around the leading edge of the sail when sailing close- hauled. -
SAFETY PRACTICES a BASIC GUIDE Adopted January 2002 Amended October 2014
INTERSCHOLASTIC SAILING ASSOCIATION SAFETY PRACTICES A BASIC GUIDE Adopted January 2002 Amended October 2014 Special thanks to our sister organization, the Intercollegiate Sailing Association of North America, for allowing us to use this Safety Guide, modeled after their own. TABLE OF CONTENTS General Safety Practices ..................................................... 1 Personal Equipment ............................................................ 2 Personal Training ................................................................ 4 Capsizes ............................................................................... 4 Safety Boats ........................................................................ 5 Safety Boat Crew Training ................................................... 6 Head Injury Awareness ....................................................... 9 References .......................................................................... 9 Foreword: Interscholastic (high school) sailing requires competitors to be safety conscious. It is our obligation to maintain the positive safety record that Interscholastic Sailing Association has enjoyed over the past 85 years. This is a BASIC GUIDE for Member Schools and District Associations to follow in regard to SAFETY PRACTICES during regattas, and instructional and recreational sailing. George H. Griswold As amended by Bill Campbell for ISSA 1. GENERAL SAFETY PRACTICES You sail because you enjoy it. In order to enhance and guarantee your enjoyment, there are a number of general -
Designing Sails Since 1969
SAILRITE SAIL KITS Designing sails since 1969. Catalina 30 Tall Rig Mainsail Kit by Frederick Leroy Carter F 31R Screecher Kit by Patrick Pettengill Capri 18 Main & Jib Sail Kits by Brent Stiles “ We built this sail ourselves!” Custom Lateen Main Kit by Steve Daigle -Karen Larson Building your own sail is a very rewarding and satisfying Each kit comes with the sail design data and a set of instructions experience. Not only is there a real sense of accomplishment, and illustrations that have been perfected from over 40 years of but the skills developed in the process will make you a more self- experience and feedback. Sail panels are pre-cut, labeled and reliant sailor. Sailrite makes the process very easy and affordable numbered for easy assembly. Panel overlap and hemming lines from start to finish by providing sail kits that include materials come plotted on each panel and double-sided tape is included used by professional sailmakers at up to 50% less the cost! to adhere panels together prior to sewing to ensure that draft and shape are maintained during construction. Batten pockets, Sailrite uses state-of-the-art design programs and hardware to windows, draft stripes, reef points, and other details will also prepare each kit. Sail panels and corner reinforcements are all come plotted on the appropriate panels if required for your sail. computer-cut and seaming lines are drawn along the edges. Draft, twist, and entry and exit curves are all carefully calculated, controlled, and positioned for each sail to maximize performance. Getting Started All materials are carefully selected by our sail designers to Getting started is easy and Sailrite’s expert staff is available toll best suit your application and only high quality sailcloths and free every working day to answer questions and help guide you laminates from Bainbridge, Challenge, Contender and others who through the ordering and construction process.