UG902 (V2020.1) May 4, 2021 Revision History
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pipelining and Vector Processing
Chapter 8 Pipelining and Vector Processing 8–1 If the pipeline stages are heterogeneous, the slowest stage determines the flow rate of the entire pipeline. This leads to other stages idling. 8–2 Pipeline stalls can be caused by three types of hazards: resource, data, and control hazards. Re- source hazards result when two or more instructions in the pipeline want to use the same resource. Such resource conflicts can result in serialized execution, reducing the scope for overlapped exe- cution. Data hazards are caused by data dependencies among the instructions in the pipeline. As a simple example, suppose that the result produced by instruction I1 is needed as an input to instruction I2. We have to stall the pipeline until I1 has written the result so that I2 reads the correct input. If the pipeline is not designed properly, data hazards can produce wrong results by using incorrect operands. Therefore, we have to worry about the correctness first. Control hazards are caused by control dependencies. As an example, consider the flow control altered by a branch instruction. If the branch is not taken, we can proceed with the instructions in the pipeline. But, if the branch is taken, we have to throw away all the instructions that are in the pipeline and fill the pipeline with instructions at the branch target. 8–3 Prefetching is a technique used to handle resource conflicts. Pipelining typically uses just-in- time mechanism so that only a simple buffer is needed between the stages. We can minimize the performance impact if we relax this constraint by allowing a queue instead of a single buffer. -
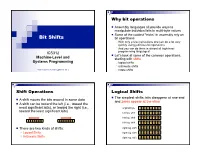
Bit Shifts Bit Operations, Logical Shifts, Arithmetic Shifts, Rotate Shifts
Why bit operations Assembly languages all provide ways to manipulate individual bits in multi-byte values Some of the coolest “tricks” in assembly rely on Bit Shifts bit operations With only a few instructions one can do a lot very quickly using judicious bit operations And you can do them in almost all high-level ICS312 programming languages! Let’s look at some of the common operations, Machine-Level and starting with shifts Systems Programming logical shifts arithmetic shifts Henri Casanova ([email protected]) rotate shifts Shift Operations Logical Shifts The simplest shifts: bits disappear at one end A shift moves the bits around in some data and zeros appear at the other A shift can be toward the left (i.e., toward the most significant bits), or toward the right (i.e., original byte 1 0 1 1 0 1 0 1 toward the least significant bits) left log. shift 0 1 1 0 1 0 1 0 left log. shift 1 1 0 1 0 1 0 0 left log. shift 1 0 1 0 1 0 0 0 There are two kinds of shifts: right log. shift 0 1 0 1 0 1 0 0 Logical Shifts right log. shift 0 0 1 0 1 0 1 0 Arithmetic Shifts right log. shift 0 0 0 1 0 1 0 1 Logical Shift Instructions Shifts and Numbers Two instructions: shl and shr The common use for shifts: quickly multiply and divide by powers of 2 One specifies by how many bits the data is shifted In decimal, for instance: multiplying 0013 by 10 amounts to doing one left shift to obtain 0130 Either by just passing a constant to the instruction multiplying by 100=102 amounts to doing two left shifts to obtain 1300 Or by using whatever -

Diploma Thesis
Faculty of Computer Science Chair for Real Time Systems Diploma Thesis Timing Analysis in Software Development Author: Martin Däumler Supervisors: Jun.-Prof. Dr.-Ing. Robert Baumgartl Dr.-Ing. Andreas Zagler Date of Submission: March 31, 2008 Martin Däumler Timing Analysis in Software Development Diploma Thesis, Chemnitz University of Technology, 2008 Abstract Rapid development processes and higher customer requirements lead to increasing inte- gration of software solutions in the automotive industry’s products. Today, several elec- tronic control units communicate by bus systems like CAN and provide computation of complex algorithms. This increasingly requires a controlled timing behavior. The following diploma thesis investigates how the timing analysis tool SymTA/S can be used in the software development process of the ZF Friedrichshafen AG. Within the scope of several scenarios, the benefits of using it, the difficulties in using it and the questions that can not be answered by the timing analysis tool are examined. Contents List of Figures iv List of Tables vi 1 Introduction 1 2 Execution Time Analysis 3 2.1 Preface . 3 2.2 Dynamic WCET Analysis . 4 2.2.1 Methods . 4 2.2.2 Problems . 4 2.3 Static WCET Analysis . 6 2.3.1 Methods . 6 2.3.2 Problems . 7 2.4 Hybrid WCET Analysis . 9 2.5 Survey of Tools: State of the Art . 9 2.5.1 aiT . 9 2.5.2 Bound-T . 11 2.5.3 Chronos . 12 2.5.4 MTime . 13 2.5.5 Tessy . 14 2.5.6 Further Tools . 15 2.6 Examination of Methods . 16 2.6.1 Software Description . -

How Data Hazards Can Be Removed Effectively
International Journal of Scientific & Engineering Research, Volume 7, Issue 9, September-2016 116 ISSN 2229-5518 How Data Hazards can be removed effectively Muhammad Zeeshan, Saadia Anayat, Rabia and Nabila Rehman Abstract—For fast Processing of instructions in computer architecture, the most frequently used technique is Pipelining technique, the Pipelining is consider an important implementation technique used in computer hardware for multi-processing of instructions. Although multiple instructions can be executed at the same time with the help of pipelining, but sometimes multi-processing create a critical situation that altered the normal CPU executions in expected way, sometime it may cause processing delay and produce incorrect computational results than expected. This situation is known as hazard. Pipelining processing increase the processing speed of the CPU but these Hazards that accrue due to multi-processing may sometime decrease the CPU processing. Hazards can be needed to handle properly at the beginning otherwise it causes serious damage to pipelining processing or overall performance of computation can be effected. Data hazard is one from three types of pipeline hazards. It may result in Race condition if we ignore a data hazard, so it is essential to resolve data hazards properly. In this paper, we tries to present some ideas to deal with data hazards are presented i.e. introduce idea how data hazards are harmful for processing and what is the cause of data hazards, why data hazard accord, how we remove data hazards effectively. While pipelining is very useful but there are several complications and serious issue that may occurred related to pipelining i.e. -

Open Source Synthesis and Verification Tool for Fixed-To-Floating and Floating-To-Fixed Points Conversions
Circuits and Systems, 2016, 7, 3874-3885 http://www.scirp.org/journal/cs ISSN Online: 2153-1293 ISSN Print: 2153-1285 Open Source Synthesis and Verification Tool for Fixed-to-Floating and Floating-to-Fixed Points Conversions Semih Aslan1, Ekram Mohammad1, Azim Hassan Salamy2 1Ingram School of Engineering, Electrical Engineering Texas State University, San Marcos, Texas, USA 2School of Engineering, Electrical Engineering University of St. Thomas, St. Paul, Minnesota, USA How to cite this paper: Aslan, S., Mo- Abstract hammad, E. and Salamy, A.H. (2016) Open Source Synthesis and Verification Tool for An open source high level synthesis fixed-to-floating and floating-to-fixed conver- Fixed-to-Floating and Floating-to-Fixed Points sion tool is presented for embedded design, communication systems, and signal Conversions. Circuits and Systems, 7, 3874- processing applications. Many systems use a fixed point number system. Fixed point 3885. http://dx.doi.org/10.4236/cs.2016.711323 numbers often need to be converted to floating point numbers for higher accuracy, dynamic range, fixed-length transmission limitations or end user requirements. A Received: May 18, 2016 similar conversion system is needed to convert floating point numbers to fixed point Accepted: May 30, 2016 numbers due to the advantages that fixed point numbers offer when compared with Published: September 23, 2016 floating point number systems, such as compact hardware, reduced verification time Copyright © 2016 by authors and and design effort. The latest embedded and SoC designs use both number systems Scientific Research Publishing Inc. together to improve accuracy or reduce required hardware in the same design. -
The Pros of Cons: Programming with Pairs and Lists
The Pros of cons: Programming with Pairs and Lists CS251 Programming Languages Spring 2016, Lyn Turbak Department of Computer Science Wellesley College Racket Values • booleans: #t, #f • numbers: – integers: 42, 0, -273 – raonals: 2/3, -251/17 – floang point (including scien3fic notaon): 98.6, -6.125, 3.141592653589793, 6.023e23 – complex: 3+2i, 17-23i, 4.5-1.4142i Note: some are exact, the rest are inexact. See docs. • strings: "cat", "CS251", "αβγ", "To be\nor not\nto be" • characters: #\a, #\A, #\5, #\space, #\tab, #\newline • anonymous func3ons: (lambda (a b) (+ a (* b c))) What about compound data? 5-2 cons Glues Two Values into a Pair A new kind of value: • pairs (a.k.a. cons cells): (cons v1 v2) e.g., In Racket, - (cons 17 42) type Command-\ to get λ char - (cons 3.14159 #t) - (cons "CS251" (λ (x) (* 2 x)) - (cons (cons 3 4.5) (cons #f #\a)) Can glue any number of values into a cons tree! 5-3 Box-and-pointer diagrams for cons trees (cons v1 v2) v1 v2 Conven3on: put “small” values (numbers, booleans, characters) inside a box, and draw a pointers to “large” values (func3ons, strings, pairs) outside a box. (cons (cons 17 (cons "cat" #\a)) (cons #t (λ (x) (* 2 x)))) 17 #t #\a (λ (x) (* 2 x)) "cat" 5-4 Evaluaon Rules for cons Big step seman3cs: e1 ↓ v1 e2 ↓ v2 (cons) (cons e1 e2) ↓ (cons v1 v2) Small-step seman3cs: (cons e1 e2) ⇒* (cons v1 e2); first evaluate e1 to v1 step-by-step ⇒* (cons v1 v2); then evaluate e2 to v2 step-by-step 5-5 cons evaluaon example (cons (cons (+ 1 2) (< 3 4)) (cons (> 5 6) (* 7 8))) ⇒ (cons (cons 3 (< 3 4)) -

Pipelining: Basic Concepts and Approaches
International Journal of Scientific & Engineering Research, Volume 7, Issue 4, April-2016 1197 ISSN 2229-5518 Pipelining: Basic Concepts and Approaches RICHA BAIJAL1 1Student,M.Tech,Computer Science And Engineering Career Point University,Alaniya,Jhalawar Road,Kota-325003 (Rajasthan) Abstract-This paper is concerned with the pipelining principles while designing a processor.The basics of instruction pipeline are discussed and an approach to minimize a pipeline stall is explained with the help of example.The main idea is to understand the working of a pipeline in a processor.Various hazards that cause pipeline degradation are explained and solutions to minimize them are discussed. Index Terms— Data dependency, Hazards in pipeline, Instruction dependency, parallelism, Pipelining, Processor, Stall. —————————— —————————— 1 INTRODUCTION does the paint. Still,2 rooms are idle. These rooms that I want to paint constitute my hardware.The painter and his skills are the objects and the way i am using them refers to the stag- O understand what pipelining is,let us consider the as- T es.Now,it is quite possible i limit my resources,i.e. I just have sembly line manufacturing of a car.If you have ever gone to a two buckets of paint at a time;therefore,i have to wait until machine work shop ; you might have seen the different as- these two stages give me an output.Although,these are inde- pendent tasks,but what i am limiting is the resources. semblies developed for developing its chasis,adding a part to I hope having this comcept in mind,now the reader -
Powerpc 601 RISC Microprocessor Users Manual
MPR601UM-01 MPC601UM/AD PowerPC™ 601 RISC Microprocessor User's Manual CONTENTS Paragraph Page Title Number Number About This Book Audience .............................................................................................................. xlii Organization......................................................................................................... xlii Additional Reading ............................................................................................. xliv Conventions ........................................................................................................ xliv Acronyms and Abbreviations ............................................................................. xliv Terminology Conventions ................................................................................. xlvii Chapter 1 Overview 1.1 PowerPC 601 Microprocessor Overview............................................................. 1-1 1.1.1 601 Features..................................................................................................... 1-2 1.1.2 Block Diagram................................................................................................. 1-3 1.1.3 Instruction Unit................................................................................................ 1-5 1.1.3.1 Instruction Queue......................................................................................... 1-5 1.1.4 Independent Execution Units.......................................................................... -

Xilinx Vivado Design Suite User Guide: Release Notes, Installation, And
Vivado Design Suite User Guide Release Notes, Installation, and Licensing UG973 (v2013.3) October 23, 2013 Notice of Disclaimer The information disclosed to you hereunder (the “Materials”) is provided solely for the selection and use of Xilinx products. To the maximum extent permitted by applicable law: (1) Materials are made available "AS IS" and with all faults, Xilinx hereby DISCLAIMS ALL WARRANTIES AND CONDITIONS, EXPRESS, IMPLIED, OR STATUTORY, INCLUDING BUT NOT LIMITED TO WARRANTIES OF MERCHANTABILITY, NON-INFRINGEMENT, OR FITNESS FOR ANY PARTICULAR PURPOSE; and (2) Xilinx shall not be liable (whether in contract or tort, including negligence, or under any other theory of liability) for any loss or damage of any kind or nature related to, arising under, or in connection with, the Materials (including your use of the Materials), including for any direct, indirect, special, incidental, or consequential loss or damage (including loss of data, profits, goodwill, or any type of loss or damage suffered as a result of any action brought by a third party) even if such damage or loss was reasonably foreseeable or Xilinx had been advised of the possibility of the same. Xilinx assumes no obligation to correct any errors contained in the Materials or to notify you of updates to the Materials or to product specifications. You may not reproduce, modify, distribute, or publicly display the Materials without prior written consent. Certain products are subject to the terms and conditions of the Limited Warranties which can be viewed at http://www.xilinx.com/warranty.htm; IP cores may be subject to warranty and support terms contained in a license issued to you by Xilinx. -

The Use of UML for Software Requirements Expression and Management
The Use of UML for Software Requirements Expression and Management Alex Murray Ken Clark Jet Propulsion Laboratory Jet Propulsion Laboratory California Institute of Technology California Institute of Technology Pasadena, CA 91109 Pasadena, CA 91109 818-354-0111 818-393-6258 [email protected] [email protected] Abstract— It is common practice to write English-language 1. INTRODUCTION ”shall” statements to embody detailed software requirements in aerospace software applications. This paper explores the This work is being performed as part of the engineering of use of the UML language as a replacement for the English the flight software for the Laser Ranging Interferometer (LRI) language for this purpose. Among the advantages offered by the of the Gravity Recovery and Climate Experiment (GRACE) Unified Modeling Language (UML) is a high degree of clarity Follow-On (F-O) mission. However, rather than use the real and precision in the expression of domain concepts as well as project’s model to illustrate our approach in this paper, we architecture and design. Can this quality of UML be exploited have developed a separate, ”toy” model for use here, because for the definition of software requirements? this makes it easier to avoid getting bogged down in project details, and instead to focus on the technical approach to While expressing logical behavior, interface characteristics, requirements expression and management that is the subject timeliness constraints, and other constraints on software using UML is commonly done and relatively straight-forward, achiev- of this paper. ing the additional aspects of the expression and management of software requirements that stakeholders expect, especially There is one exception to this choice: we will describe our traceability, is far less so. -
Java for Scientific Computing, Pros and Cons
Journal of Universal Computer Science, vol. 4, no. 1 (1998), 11-15 submitted: 25/9/97, accepted: 1/11/97, appeared: 28/1/98 Springer Pub. Co. Java for Scienti c Computing, Pros and Cons Jurgen Wol v. Gudenb erg Institut fur Informatik, Universitat Wurzburg wol @informatik.uni-wuerzburg.de Abstract: In this article we brie y discuss the advantages and disadvantages of the language Java for scienti c computing. We concentrate on Java's typ e system, investi- gate its supp ort for hierarchical and generic programming and then discuss the features of its oating-p oint arithmetic. Having found the weak p oints of the language we pro- p ose workarounds using Java itself as long as p ossible. 1 Typ e System Java distinguishes b etween primitive and reference typ es. Whereas this distinc- tion seems to b e very natural and helpful { so the primitives which comprise all standard numerical data typ es have the usual value semantics and expression concept, and the reference semantics of the others allows to avoid p ointers at all{ it also causes some problems. For the reference typ es, i.e. arrays, classes and interfaces no op erators are available or may b e de ned and expressions can only b e built by metho d calls. Several variables may simultaneously denote the same ob ject. This is certainly strange in a numerical setting, but not to avoid, since classes have to b e used to intro duce higher data typ es. On the other hand, the simple hierarchy of classes with the ro ot Object clearly b elongs to the advantages of the language. -

A Metaobject Protocol for Fault-Tolerant CORBA Applications
A Metaobject Protocol for Fault-Tolerant CORBA Applications Marc-Olivier Killijian*, Jean-Charles Fabre*, Juan-Carlos Ruiz-Garcia*, Shigeru Chiba** *LAAS-CNRS, 7 Avenue du Colonel Roche **Institute of Information Science and 31077 Toulouse cedex, France Electronics, University of Tsukuba, Tennodai, Tsukuba, Ibaraki 305-8573, Japan Abstract The corner stone of a fault-tolerant reflective The use of metalevel architectures for the architecture is the MOP. We thus propose a special implementation of fault-tolerant systems is today very purpose MOP to address the problems of general-purpose appealing. Nevertheless, all such fault-tolerant systems ones. We show that compile-time reflection is a good have used a general-purpose metaobject protocol (MOP) approach for developing a specialized runtime MOP. or are based on restricted reflective features of some The definition and the implementation of an object-oriented language. According to our past appropriate runtime metaobject protocol for implementing experience, we define in this paper a suitable metaobject fault tolerance into CORBA applications is the main protocol, called FT-MOP for building fault-tolerant contribution of the work reported in this paper. This systems. We explain how to realize a specialized runtime MOP, called FT-MOP (Fault Tolerance - MetaObject MOP using compile-time reflection. This MOP is CORBA Protocol), is sufficiently general to be used for other aims compliant: it enables the execution and the state evolution (mobility, adaptability, migration, security). FT-MOP of CORBA objects to be controlled and enables the fault provides a mean to attach dynamically fault tolerance tolerance metalevel to be developed as CORBA software. strategies to CORBA objects as CORBA metaobjects, enabling thus these strategies to be implemented as 1 .