A Metaobject Protocol for Fault-Tolerant CORBA Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Application of TRIE Data Structure and Corresponding Associative Algorithms for Process Optimization in GRID Environment
Application of TRIE data structure and corresponding associative algorithms for process optimization in GRID environment V. V. Kashanskya, I. L. Kaftannikovb South Ural State University (National Research University), 76, Lenin prospekt, Chelyabinsk, 454080, Russia E-mail: a [email protected], b [email protected] Growing interest around different BOINC powered projects made volunteer GRID model widely used last years, arranging lots of computational resources in different environments. There are many revealed problems of Big Data and horizontally scalable multiuser systems. This paper provides an analysis of TRIE data structure and possibilities of its application in contemporary volunteer GRID networks, including routing (L3 OSI) and spe- cialized key-value storage engine (L7 OSI). The main goal is to show how TRIE mechanisms can influence de- livery process of the corresponding GRID environment resources and services at different layers of networking abstraction. The relevance of the optimization topic is ensured by the fact that with increasing data flow intensi- ty, the latency of the various linear algorithm based subsystems as well increases. This leads to the general ef- fects, such as unacceptably high transmission time and processing instability. Logically paper can be divided into three parts with summary. The first part provides definition of TRIE and asymptotic estimates of corresponding algorithms (searching, deletion, insertion). The second part is devoted to the problem of routing time reduction by applying TRIE data structure. In particular, we analyze Cisco IOS switching services based on Bitwise TRIE and 256 way TRIE data structures. The third part contains general BOINC architecture review and recommenda- tions for highly-loaded projects. -

Metaobject Protocols: Why We Want Them and What Else They Can Do
Metaobject protocols: Why we want them and what else they can do Gregor Kiczales, J.Michael Ashley, Luis Rodriguez, Amin Vahdat, and Daniel G. Bobrow Published in A. Paepcke, editor, Object-Oriented Programming: The CLOS Perspective, pages 101 ¾ 118. The MIT Press, Cambridge, MA, 1993. © Massachusetts Institute of Technology All rights reserved. No part of this book may be reproduced in any form by any electronic or mechanical means (including photocopying, recording, or information storage and retrieval) without permission in writing from the publisher. Metaob ject Proto cols WhyWeWant Them and What Else They Can Do App ears in Object OrientedProgramming: The CLOS Perspective c Copyright 1993 MIT Press Gregor Kiczales, J. Michael Ashley, Luis Ro driguez, Amin Vahdat and Daniel G. Bobrow Original ly conceivedasaneat idea that could help solve problems in the design and implementation of CLOS, the metaobject protocol framework now appears to have applicability to a wide range of problems that come up in high-level languages. This chapter sketches this wider potential, by drawing an analogy to ordinary language design, by presenting some early design principles, and by presenting an overview of three new metaobject protcols we have designed that, respectively, control the semantics of Scheme, the compilation of Scheme, and the static paral lelization of Scheme programs. Intro duction The CLOS Metaob ject Proto col MOP was motivated by the tension b etween, what at the time, seemed liketwo con icting desires. The rst was to have a relatively small but p owerful language for doing ob ject-oriented programming in Lisp. The second was to satisfy what seemed to b e a large numb er of user demands, including: compatibility with previous languages, p erformance compara- ble to or b etter than previous implementations and extensibility to allow further exp erimentation with ob ject-oriented concepts see Chapter 2 for examples of directions in which ob ject-oriented techniques might b e pushed. -
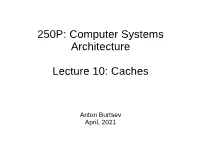
250P: Computer Systems Architecture Lecture 10: Caches
250P: Computer Systems Architecture Lecture 10: Caches Anton Burtsev April, 2021 The Cache Hierarchy Core L1 L2 L3 Off-chip memory 2 Accessing the Cache Byte address 101000 Offset 8-byte words 8 words: 3 index bits Direct-mapped cache: each address maps to a unique address Sets Data array 3 The Tag Array Byte address 101000 Tag 8-byte words Compare Direct-mapped cache: each address maps to a unique address Tag array Data array 4 Increasing Line Size Byte address A large cache line size smaller tag array, fewer misses because of spatial locality 10100000 32-byte cache Tag Offset line size or block size Tag array Data array 5 Associativity Byte address Set associativity fewer conflicts; wasted power because multiple data and tags are read 10100000 Tag Way-1 Way-2 Tag array Data array Compare 6 Example • 32 KB 4-way set-associative data cache array with 32 byte line sizes • How many sets? • How many index bits, offset bits, tag bits? • How large is the tag array? 7 Types of Cache Misses • Compulsory misses: happens the first time a memory word is accessed – the misses for an infinite cache • Capacity misses: happens because the program touched many other words before re-touching the same word – the misses for a fully-associative cache • Conflict misses: happens because two words map to the same location in the cache – the misses generated while moving from a fully-associative to a direct-mapped cache • Sidenote: can a fully-associative cache have more misses than a direct-mapped cache of the same size? 8 Reducing Miss Rate • Large block -

Chapter 2 Basics of Scanning And
Chapter 2 Basics of Scanning and Conventional Programming in Java In this chapter, we will introduce you to an initial set of Java features, the equivalent of which you should have seen in your CS-1 class; the separation of problem, representation, algorithm and program – four concepts you have probably seen in your CS-1 class; style rules with which you are probably familiar, and scanning - a general class of problems we see in both computer science and other fields. Each chapter is associated with an animating recorded PowerPoint presentation and a YouTube video created from the presentation. It is meant to be a transcript of the associated presentation that contains little graphics and thus can be read even on a small device. You should refer to the associated material if you feel the need for a different instruction medium. Also associated with each chapter is hyperlinked code examples presented here. References to previously presented code modules are links that can be traversed to remind you of the details. The resources for this chapter are: PowerPoint Presentation YouTube Video Code Examples Algorithms and Representation Four concepts we explicitly or implicitly encounter while programming are problems, representations, algorithms and programs. Programs, of course, are instructions executed by the computer. Problems are what we try to solve when we write programs. Usually we do not go directly from problems to programs. Two intermediate steps are creating algorithms and identifying representations. Algorithms are sequences of steps to solve problems. So are programs. Thus, all programs are algorithms but the reverse is not true. -

BALANCING the Eulisp METAOBJECT PROTOCOL
LISP AND SYMBOLIC COMPUTATION An International Journal c Kluwer Academic Publishers Manufactured in The Netherlands Balancing the EuLisp Metaob ject Proto col y HARRY BRETTHAUER bretthauergmdde JURGEN KOPP koppgmdde German National Research Center for Computer Science GMD PO Box W Sankt Augustin FRG HARLEY DAVIS davisilogfr ILOG SA avenue Gal lieni Gentil ly France KEITH PLAYFORD kjpmathsbathacuk School of Mathematical Sciences University of Bath Bath BA AY UK Keywords Ob jectoriented Programming Language Design Abstract The challenge for the metaob ject proto col designer is to balance the con icting demands of eciency simplici ty and extensibil ity It is imp ossible to know all desired extensions in advance some of them will require greater functionality while oth ers require greater eciency In addition the proto col itself must b e suciently simple that it can b e fully do cumented and understo o d by those who need to use it This pap er presents the framework of a metaob ject proto col for EuLisp which provides expressiveness by a multileveled proto col and achieves eciency by static semantics for predened metaob jects and mo dularizin g their op erations The EuLisp mo dule system supp orts global optimizations of metaob ject applicati ons The metaob ject system itself is structured into mo dules taking into account the consequences for the compiler It provides introsp ective op erations as well as extension interfaces for various functionaliti es including new inheritance allo cation and slot access semantics While -

C Programming: Data Structures and Algorithms
C Programming: Data Structures and Algorithms An introduction to elementary programming concepts in C Jack Straub, Instructor Version 2.07 DRAFT C Programming: Data Structures and Algorithms, Version 2.07 DRAFT C Programming: Data Structures and Algorithms Version 2.07 DRAFT Copyright © 1996 through 2006 by Jack Straub ii 08/12/08 C Programming: Data Structures and Algorithms, Version 2.07 DRAFT Table of Contents COURSE OVERVIEW ........................................................................................ IX 1. BASICS.................................................................................................... 13 1.1 Objectives ...................................................................................................................................... 13 1.2 Typedef .......................................................................................................................................... 13 1.2.1 Typedef and Portability ............................................................................................................. 13 1.2.2 Typedef and Structures .............................................................................................................. 14 1.2.3 Typedef and Functions .............................................................................................................. 14 1.3 Pointers and Arrays ..................................................................................................................... 16 1.4 Dynamic Memory Allocation ..................................................................................................... -

Abstract Data Types
Chapter 2 Abstract Data Types The second idea at the core of computer science, along with algorithms, is data. In a modern computer, data consists fundamentally of binary bits, but meaningful data is organized into primitive data types such as integer, real, and boolean and into more complex data structures such as arrays and binary trees. These data types and data structures always come along with associated operations that can be done on the data. For example, the 32-bit int data type is defined both by the fact that a value of type int consists of 32 binary bits but also by the fact that two int values can be added, subtracted, multiplied, compared, and so on. An array is defined both by the fact that it is a sequence of data items of the same basic type, but also by the fact that it is possible to directly access each of the positions in the list based on its numerical index. So the idea of a data type includes a specification of the possible values of that type together with the operations that can be performed on those values. An algorithm is an abstract idea, and a program is an implementation of an algorithm. Similarly, it is useful to be able to work with the abstract idea behind a data type or data structure, without getting bogged down in the implementation details. The abstraction in this case is called an \abstract data type." An abstract data type specifies the values of the type, but not how those values are represented as collections of bits, and it specifies operations on those values in terms of their inputs, outputs, and effects rather than as particular algorithms or program code. -

Common Lisp Object System Specification 3. Metaobject Protocol
Common Lisp Object System Specification 3. Metaobject Protocol This document was written by Daniel G. Bobrow, Linda G. DeMichiel, Richard P. Gabriel, Sonya E. Keene, Gregor Kiczales, and David A. Moon. Contributors to this document include Patrick Dussud, Kenneth Kahn, Jim Kempf, Larry Masinter, Mark Stefik, Daniel L. Weinreb, and Jon L White. CONTENTS CONTENTS ................................................... ............ 3–2 Status of Document ................................................... ........... 3–5 Terminology ................................................... ................ 3–6 Introduction ................................................... ................ 3–7 Class Organization in the CLOS Kernel ............................................... 3–9 The Classes in the CLOS Kernel ................................................... 3–10 standard-class ................................................... ............ 3–11 forward-referenced-class ................................................... ..... 3–11 built-in-class ................................................... ............. 3–11 structure-class ................................................... ............ 3–12 funcallable-standard-class ................................................... .... 3–12 standard-slot-description ................................................... .... 3–12 standard-class-slot-description ................................................... 3–12 standard-method ................................................... .......... 3–12 -
The Pros of Cons: Programming with Pairs and Lists
The Pros of cons: Programming with Pairs and Lists CS251 Programming Languages Spring 2016, Lyn Turbak Department of Computer Science Wellesley College Racket Values • booleans: #t, #f • numbers: – integers: 42, 0, -273 – raonals: 2/3, -251/17 – floang point (including scien3fic notaon): 98.6, -6.125, 3.141592653589793, 6.023e23 – complex: 3+2i, 17-23i, 4.5-1.4142i Note: some are exact, the rest are inexact. See docs. • strings: "cat", "CS251", "αβγ", "To be\nor not\nto be" • characters: #\a, #\A, #\5, #\space, #\tab, #\newline • anonymous func3ons: (lambda (a b) (+ a (* b c))) What about compound data? 5-2 cons Glues Two Values into a Pair A new kind of value: • pairs (a.k.a. cons cells): (cons v1 v2) e.g., In Racket, - (cons 17 42) type Command-\ to get λ char - (cons 3.14159 #t) - (cons "CS251" (λ (x) (* 2 x)) - (cons (cons 3 4.5) (cons #f #\a)) Can glue any number of values into a cons tree! 5-3 Box-and-pointer diagrams for cons trees (cons v1 v2) v1 v2 Conven3on: put “small” values (numbers, booleans, characters) inside a box, and draw a pointers to “large” values (func3ons, strings, pairs) outside a box. (cons (cons 17 (cons "cat" #\a)) (cons #t (λ (x) (* 2 x)))) 17 #t #\a (λ (x) (* 2 x)) "cat" 5-4 Evaluaon Rules for cons Big step seman3cs: e1 ↓ v1 e2 ↓ v2 (cons) (cons e1 e2) ↓ (cons v1 v2) Small-step seman3cs: (cons e1 e2) ⇒* (cons v1 e2); first evaluate e1 to v1 step-by-step ⇒* (cons v1 v2); then evaluate e2 to v2 step-by-step 5-5 cons evaluaon example (cons (cons (+ 1 2) (< 3 4)) (cons (> 5 6) (* 7 8))) ⇒ (cons (cons 3 (< 3 4)) -

The Use of UML for Software Requirements Expression and Management
The Use of UML for Software Requirements Expression and Management Alex Murray Ken Clark Jet Propulsion Laboratory Jet Propulsion Laboratory California Institute of Technology California Institute of Technology Pasadena, CA 91109 Pasadena, CA 91109 818-354-0111 818-393-6258 [email protected] [email protected] Abstract— It is common practice to write English-language 1. INTRODUCTION ”shall” statements to embody detailed software requirements in aerospace software applications. This paper explores the This work is being performed as part of the engineering of use of the UML language as a replacement for the English the flight software for the Laser Ranging Interferometer (LRI) language for this purpose. Among the advantages offered by the of the Gravity Recovery and Climate Experiment (GRACE) Unified Modeling Language (UML) is a high degree of clarity Follow-On (F-O) mission. However, rather than use the real and precision in the expression of domain concepts as well as project’s model to illustrate our approach in this paper, we architecture and design. Can this quality of UML be exploited have developed a separate, ”toy” model for use here, because for the definition of software requirements? this makes it easier to avoid getting bogged down in project details, and instead to focus on the technical approach to While expressing logical behavior, interface characteristics, requirements expression and management that is the subject timeliness constraints, and other constraints on software using UML is commonly done and relatively straight-forward, achiev- of this paper. ing the additional aspects of the expression and management of software requirements that stakeholders expect, especially There is one exception to this choice: we will describe our traceability, is far less so. -

Data Structures, Buffers, and Interprocess Communication
Data Structures, Buffers, and Interprocess Communication We’ve looked at several examples of interprocess communication involving the transfer of data from one process to another process. We know of three mechanisms that can be used for this transfer: - Files - Shared Memory - Message Passing The act of transferring data involves one process writing or sending a buffer, and another reading or receiving a buffer. Most of you seem to be getting the basic idea of sending and receiving data for IPC… it’s a lot like reading and writing to a file or stdin and stdout. What seems to be a little confusing though is HOW that data gets copied to a buffer for transmission, and HOW data gets copied out of a buffer after transmission. First… let’s look at a piece of data. typedef struct { char ticker[TICKER_SIZE]; double price; } item; . item next; . The data we want to focus on is “next”. “next” is an object of type “item”. “next” occupies memory in the process. What we’d like to do is send “next” from processA to processB via some kind of IPC. IPC Using File Streams If we were going to use good old C++ filestreams as the IPC mechanism, our code would look something like this to write the file: // processA is the sender… ofstream out; out.open(“myipcfile”); item next; strcpy(next.ticker,”ABC”); next.price = 55; out << next.ticker << “ “ << next.price << endl; out.close(); Notice that we didn’t do this: out << next << endl; Why? Because the “<<” operator doesn’t know what to do with an object of type “item”. -

Metaclasses: Generative C++
Metaclasses: Generative C++ Document Number: P0707 R3 Date: 2018-02-11 Reply-to: Herb Sutter ([email protected]) Audience: SG7, EWG Contents 1 Overview .............................................................................................................................................................2 2 Language: Metaclasses .......................................................................................................................................7 3 Library: Example metaclasses .......................................................................................................................... 18 4 Applying metaclasses: Qt moc and C++/WinRT .............................................................................................. 35 5 Alternatives for sourcedefinition transform syntax .................................................................................... 41 6 Alternatives for applying the transform .......................................................................................................... 43 7 FAQs ................................................................................................................................................................. 46 8 Revision history ............................................................................................................................................... 51 Major changes in R3: Switched to function-style declaration syntax per SG7 direction in Albuquerque (old: $class M new: constexpr void M(meta::type target,