Simultaneous Localization and Mapping 46.1 SLAM: Problem Definition 1155 Ical Model for SLAM
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Learning Maps for Indoor Mobile Robot Navigation
Learning Maps for Indoor Mobile Robot Navigation Sebastian Thrun Arno BÈucken April 1996 CMU-CS-96-121 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 The ®rst author is partly and the second author exclusively af®liated with the Computer Science Department III of the University of Bonn, Germany, where part of this research was carried out. This research is sponsored in part by the National Science Foundation under award IRI-9313367, and by the Wright Laboratory, Aeronautical Systems Center, Air Force Materiel Command, USAF, and the Advanced Research Projects Agency (ARPA) under grant number F33615-93-1-1330. The views and conclusionscontained in this documentare those of the author and should not be interpreted as necessarily representing of®cial policies or endorsements, either expressed or implied, of NSF, Wright Laboratory or the United States Government. Keywords: autonomous robots, exploration, mobile robots, neural networks, occupancy grids, path planning, planning, robot mapping, topological maps Abstract Autonomous robots must be able to learn and maintain models of their environ- ments. Research on mobile robot navigation has produced two major paradigms for mapping indoor environments: grid-based and topological. While grid-based methods produce accurate metric maps, their complexity often prohibits ef®cient planning and problem solving in large-scale indoor environments. Topological maps, on the other hand, can be used much more ef®ciently, yet accurate and consistent topological maps are considerably dif®cult to learn in large-scale envi- ronments. This paper describes an approach that integrates both paradigms: grid-based and topological. Grid-based maps are learned using arti®cial neural networks and Bayesian integration. -

Towards Autonomous Localization of an Underwater Drone
TOWARDS AUTONOMOUS LOCALIZATION OF AN UNDERWATER DRONE A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science by Nathan Sfard June 2018 c 2018 Nathan Sfard ALL RIGHTS RESERVED ii COMMITTEE MEMBERSHIP TITLE: Towards Autonomous Localization of an Underwater Drone AUTHOR: Nathan Sfard DATE SUBMITTED: June 2018 COMMITTEE CHAIR: Lynne Slivovsky, Ph.D. Professor of Computer Engineering COMMITTEE MEMBER: John Seng, Ph.D. Professor of Computer Science COMMITTEE MEMBER: Xiao-Hua Yu, Ph.D. Professor of Electrical Engineering iii ABSTRACT Towards Autonomous Localization of an Underwater Drone Nathan Sfard Autonomous vehicle navigation is a complex and challenging task. Land and aerial vehicles often use highly accurate GPS sensors to localize themselves in their envi- ronments. These sensors are ineffective in underwater environments due to signal attenuation. Autonomous underwater vehicles utilize one or more of the following approaches for successful localization and navigation: inertial/dead-reckoning, acous- tic signals, and geophysical data. This thesis examines autonomous localization in a simulated environment for an OpenROV Underwater Drone using a Kalman Fil- ter. This filter performs state estimation for a dead reckoning system exhibiting an additive error in location measurements. We evaluate the accuracy of this Kalman Filter by analyzing the effect each parameter has on accuracy, then choosing the best combination of parameter values to assess the overall accuracy of the Kalman Filter. We find that the two parameters with the greatest effects on the system are the con- stant acceleration and the measurement uncertainty of the system. -
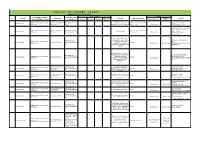
Robotics Laboratory List
Robotics List (ロボット技術関連コースのある大学) Robotics List by University Degree sought English Undergraduate / Graduate Admissions Office No. University Department Professional Keywords Application Deadline Degree in Lab links Schools / Institutes or others Website Bachelor Master’s Doctoral English Admissions Master's English Graduate School of Science and Department of Mechanical http://www.se.chiba- Robotics, Dexterous Doctoral:June and December ○ http://www.em.eng.chiba- 1 Chiba University ○ ○ ○ Engineering Engineering u.jp/en/ Manipulation, Visual Recognition Master's:June (Doctoral only) u.jp/~namiki/index-e.html Laboratory Innovative Therapeutic Engineering directed by Prof. Graduate School of Science and Department of Medical http://www.tms.chiba- Doctoral:June and December ○ 1 Chiba University ○ ○ Surgical Robotics ○ Ryoichi Nakamura Engineering Engineering u.jp/english/index.html Master's:June (Doctoral only) http://www.cfme.chiba- u.jp/~nakamura/ Micro Electro Mechanical Systems, Micro Sensors, Micro Micro System Laboratory (Dohi http://global.chuo- Graduate School of Science and Coil, Magnetic Resonance ○ ○ Lab.) 2 Chuo University Precision Mechanics u.ac.jp/english/admissio ○ ○ October Engineering Imaging, Blood Pressure (Doctoral only) (Doctoral only) http://www.msl.mech.chuo-u.ac.jp/ ns/ Measurement, Arterial Tonometry (Japanese only) Method Assistive Robotics, Human-Robot Communication, Human-Robot Human-Systems Laboratory http://global.chuo- Graduate School of Science and Collaboration, Ambient ○ http://www.mech.chuo- 2 Chuo University -

Design and Control of a Large Modular Robot Hexapod
Design and Control of a Large Modular Robot Hexapod Matt Martone CMU-RI-TR-19-79 November 22, 2019 The Robotics Institute School of Computer Science Carnegie Mellon University Pittsburgh, PA Thesis Committee: Howie Choset, chair Matt Travers Aaron Johnson Julian Whitman Submitted in partial fulfillment of the requirements for the degree of Master of Science in Robotics. Copyright © 2019 Matt Martone. All rights reserved. To all my mentors: past and future iv Abstract Legged robotic systems have made great strides in recent years, but unlike wheeled robots, limbed locomotion does not scale well. Long legs demand huge torques, driving up actuator size and onboard battery mass. This relationship results in massive structures that lack the safety, portabil- ity, and controllability of their smaller limbed counterparts. Innovative transmission design paired with unconventional controller paradigms are the keys to breaking this trend. The Titan 6 project endeavors to build a set of self-sufficient modular joints unified by a novel control architecture to create a spiderlike robot with two-meter legs that is robust, field- repairable, and an order of magnitude lighter than similarly sized systems. This thesis explores how we transformed desired behaviors into a set of workable design constraints, discusses our prototypes in the context of the project and the field, describes how our controller leverages compliance to improve stability, and delves into the electromechanical designs for these modular actuators that enable Titan 6 to be both light and strong. v vi Acknowledgments This work was made possible by a huge group of people who taught and supported me throughout my graduate studies and my time at Carnegie Mellon as a whole. -
Mapping Why Mapping?
Mapping Why Mapping? Learning maps is one of the fundamental problems in mobile robotics Maps allow robots to efficiently carry out their tasks, allow localization … Successful robot systems rely on maps for localization, path planning, activity planning etc. The General Problem of Mapping What does the environment look like? The General Problem of Mapping The problem of robotic mapping is that of acquiring a spatial model of a robot’s environment Formally, mapping involves, given the sensor data, d {u1, z1,u2 , z2 ,,un , zn} to calculate the most likely map m* arg max P(m | d) m Mapping Challenges A key challenge arises from the measurement errors, which are statistically dependent Errors accumulate over time They affect future measurement Other Challenges of Mapping The high dimensionality of the entities that are being mapped Mapping can be high dimensional Correspondence problem Determine if sensor measurements taken at different points in time correspond to the same physical object in the world Environment changes over time Slower changes: trees in different seasons Faster changes: people walking by Robots must choose their way during mapping Robotic exploration problem Factors that Influence Mapping Size: the larger the environment, the more difficult Perceptual ambiguity the more frequent different places look alike, the more difficult Cycles cycles make robots return via different paths, the accumulated odometric error can be huge The following discussion assumes mapping with known poses Mapping vs. Localization Learning maps is a “chicken-and-egg” problem First, there is a localization problem. Errors can be easily accumulated in odometry, making it less certain about where it is Methods exist to correct the error given a perfect map Second, there is a mapping problem. -

(12) United States Patent (10) Patent No.: US 8,337,482 B2 Wood, Jr
US008337482B2 (12) United States Patent (10) Patent No.: US 8,337,482 B2 Wood, Jr. (45) Date of Patent: *Dec. 25, 2012 (54) SYSTEM FOR PERFUSION MANAGEMENT (56) References Cited (75) Inventor: Lowell L. Wood, Jr., Livermore, CA U.S. PATENT DOCUMENTS (US) 3,391,697 A 7, 1968 Greatbatch 3,821,469 A 6, 1974 Whetstone et al. (73) Assignee: The Invention Science Fund I, LLC, 3,941,1273,837,339 A 3,9, 19761974 flagAisenb e tal. Bellevue, WA (US) 3,983.474. A 9/1976 Kuipers 4,054,881 A 10, 1977 Raab (*)c Notice:- r Subject to any disclaimer, the term of this 4,202,3494,119,900 A 10,5/1980 1978 JonesKremnitz patent is extended or adjusted under 35 4.262.306 A 4, 1981 Renner U.S.C. 154(b) by 1417 days. 4.267,831. A 5/1981 Aguilar This patent is Subject to a terminal dis- 2. A 3.18: R et al. claimer. 4,339.953 A 7, 1982 Iwasaki 4,367,741 A 1/1983 Michaels 4,396,885 A 8, 1983 Constant (21) Appl. No.: 10/827,576 4,403,321 A 9/1983 Kriger 4.418,422 A 11/1983 Richter et al. (22) Filed: Apr. 19, 2004 4,431,005 A 2f1984 McCormick 4,583, 190 A 4, 1986 Sab O O 4,585,652 A 4, 1986 Miller et al. (65) Prior Publication Data 4,628,928 A 12/1986 Lowell 4,638,798 A 1/1987 Shelden et al. US 2005/O234399 A1 Oct. -

New Method for Robotic Systems Architecture
NEW METHOD FOR ROBOTIC SYSTEMS ARCHITECTURE ANALYSIS, MODELING, AND DESIGN By LU LI Submitted in partial fulfillment of the requirements For the degree of Master of Science Thesis Advisor: Dr. Roger Quinn Department of Mechanical and Aerospace Engineering CASE WESTERN RESERVE UNIVERSITY August 2019 CASE WESTERN RESERVE UNIVERSITY SCHOOL OF GRADUATE STUDIES We hereby approve the thesis/dissertation of Lu Li candidate for the degree of Master of Science. Committee Chair Dr. Roger Quinn Committee Member Dr. Musa Audu Committee Member Dr. Richard Bachmann Date of Defense July 5, 2019 *We also certify that written approval has been obtained for any proprietary material contained therein. ii Table of Contents Table of Contents ................................................................................................................................................ i List of Tables ....................................................................................................................................................... ii List of Figures .................................................................................................................................................... iii Copyright page .................................................................................................................................................. iv Preface ..................................................................................................................................................................... v Acknowledgements -

Autonomous Robot Navigation in Highly Populated Pedestrian Zones
Autonomous Robot Navigation in Highly Populated Pedestrian Zones Rainer K¨ummerle Michael Ruhnke Department of Computer Science Department of Computer Science University of Freiburg University of Freiburg 79110 Freiburg, Germany 79110 Freiburg, Germany [email protected] [email protected] Bastian Steder Cyrill Stachniss Department of Computer Science Department of Computer Science University of Freiburg University of Freiburg 79110 Freiburg, Germany 79110 Freiburg, Germany [email protected] [email protected] Wolfram Burgard Department of Computer Science University of Freiburg 79110 Freiburg, Germany [email protected] Abstract In the past, there has been a tremendous progress in the area of autonomous robot naviga- tion and a large variety of robots have been developed who demonstrated robust navigation capabilities indoors, in non-urban outdoor environments, or on roads and relatively few ap- proaches focus on navigation in urban environments such as city centers. Urban areas, how- ever, introduce numerous challenges for autonomous robots as they are rather unstructured and dynamic. In this paper, we present a navigation system for mobile robots designed to operate in crowded city environments and pedestrian zones. We describe the different com- ponents of this system including a SLAM module for dealing with huge maps of city centers, a planning component for inferring feasible paths taking also into account the traversability and type of terrain, a module for accurate localization in dynamic environments, and means for calibrating and monitoring the platform. Our navigation system has been implemented and tested in several large-scale field tests, in which a real robot autonomously navigated over several kilometers in a complex urban environment. -

Simultaneous Localization and Mapping in Marine Environments
Chapter 8 Simultaneous Localization and Mapping in Marine Environments Maurice F. Fallon∗, Hordur Johannsson, Michael Kaess, John Folkesson, Hunter McClelland, Brendan J. Englot, Franz S. Hover and John J. Leonard Abstract Accurate navigation is a fundamental requirement for robotic systems— marine and terrestrial. For an intelligent autonomous system to interact effectively and safely with its environment, it needs to accurately perceive its surroundings. While traditional dead-reckoning filtering can achieve extremely high performance, the localization accuracy decays monotonically with distance traveled. Other ap- proaches (such as external beacons) can help; nonetheless, the typical prerogative is to remain at a safe distance and to avoid engaging with the environment. In this chapter we discuss alternative approaches which utilize onboard sensors so that the robot can estimate the location of sensed objects and use these observations to improve its own navigation as well its perception of the environment. This approach allows for meaningful interaction and autonomy. Three motivating autonomous underwater vehicle (AUV) applications are outlined herein. The first fuses external range sensing with relative sonar measurements. The second application localizes relative to a prior map so as to revisit a specific feature, while the third builds an accurate model of an underwater structure which is consistent and complete. In particular we demonstrate that each approach can be abstracted to a core problem of incremental estimation within a sparse graph of the AUV’s trajectory and the locations of features of interest which can be updated and optimized in real time on board the AUV. Maurice F. Fallon · Hordur Johannsson · Michael Kaess · John Folkesson · Hunter McClelland · Brendan J. -
2012 IEEE International Conference on Robotics and Automation (ICRA 2012)
2012 IEEE International Conference on Robotics and Automation (ICRA 2012) St. Paul, Minnesota, USA 14 – 18 May 2012 Pages 1-798 IEEE Catalog Number: CFP12RAA-PRT ISBN: 978-1-4673-1403-9 1/7 Content List of 2012 IEEE International Conference on Robotics and Automation Technical Program for Tuesday May 15, 2012 TuA01 Meeting Room 1 (Mini-sota) Estimation and Control for UAVs (Regular Session) Chair: Spletzer, John Lehigh Univ. Co-Chair: Robuffo Giordano, Paolo Max Planck Inst. for Biological Cybernetics 08:30-08:45 TuA01.1 State Estimation for Aggressive Flight in GPS-Denied Environments Using Onboard Sensing, pp. 1-8. Bry, Adam Massachusetts Inst. of Tech. Bachrach, Abraham Massachusetts Inst. of Tech. Roy, Nicholas Massachusetts Inst. of Tech. 08:45-09:00 TuA01.2 Autonomous Indoor 3D Exploration with a Micro-Aerial Vehicle, pp. 9-15. Shen, Shaojie Univ. of Pennsylvania Michael, Nathan Univ. of Pennsylvania Kumar, Vijay Univ. of Pennsylvania 09:00-09:15 TuA01.3 Wind Field Estimation for Autonomous Dynamic Soaring, pp. 16-22. Langelaan, Jack W. Penn State Univ. Spletzer, John Lehigh Univ. Montella, Corey Lehigh Univ. Grenestedt, Joachim Lehigh Univ. 09:15-09:30 TuA01.4 Decentralized Formation Control with Variable Shapes for Aerial Robots, pp. 23-30. Attachment Turpin, Matthew Univ. of Pennsylvania Michael, Nathan Univ. of Pennsylvania Kumar, Vijay Univ. of Pennsylvania 09:30-09:45 TuA01.5 Versatile Distributed Pose Estimation and Sensor Self-Calibration for an Autonomous MAV, pp. 31-38. Attachment Weiss, Stephan ETH Zurich Achtelik, Markus W. ETH Zurich, Autonomous Systems Lab. Chli, Margarita ETH Zurich Siegwart, Roland ETH Zurich 09:45-10:00 TuA01.6 Probabilistic Velocity Estimation for Autonomous Miniature Airships Using Thermal Air Flow Sensors, pp. -

Educational Outdoor Mobile Robot for Trash Pickup
Educational Outdoor Mobile Robot for Trash Pickup Kiran Pattanashetty, Kamal P. Balaji, and Shunmugham R Pandian, Senior Member, IEEE Department of Electrical and Electronics Engineering Indian Institute of Information Technology, Design and Manufacturing-Kancheepuram Chennai 600127, Tamil Nadu, India [email protected] Abstract— Machines in general and robots in particular, programs to motivate and retain students [3]. The playful appeal greatly to children and youth. With the widespread learning potential of robotics (and the related field of availability of low-cost open source hardware and free open mechatronics) means that college students could be involved source software, robotics has become central to the promotion of in service learning through introducing school children to STEM education in schools, and active learning at design, machines, robots, electronics, computers, college/university level. With robots, children in developed countries gain from technological immersion, or exposure to the programming, environmental literacy, and so on, e.g., [4], [5]. latest technologies and gadgets. Yet, developing countries like A comprehensive review of studies on introducing robotics in India still lag in the use of robots at school and even college level. K-12 STEM education is presented by Karim, et al [6]. It In this paper, an innovative and low-cost educational outdoor concludes that robots play a positive role in educational mobile robot is developed for deployment by school children learning, and promote creative thinking and problem solving during volunteer trash pickup. The wheeled mobile robot is skills. It also identifies the need for standardized evaluation constructed with inexpensive commercial off-the-shelf techniques on the effectiveness of robotics-based learning, and components, including single board computer and miscellaneous for tailored pedagogical modules and teacher training. -

Distributed Robotic Mapping
DISTRIBUTED COLLABORATIVE ROBOTIC MAPPING by DAVID BARNHARD (Under Direction the of Dr. Walter D. Potter) ABSTRACT The utilization of multiple robots to map an unknown environment is a challenging problem within Artificial Intelligence. This thesis first presents previous efforts to develop robotic platforms that have demonstrated incremental progress in coordination for mapping and target acquisition tasks. Next, we present a rewards based method that could increase the coordination ability of multiple robots in a distributed mapping task. The method that is presented is a reinforcement based emergent behavior approach that rewards individual robots for performing desired tasks. It is expected that the use of a reward and taxation system will result in individual robots effectively coordinating their efforts to complete a distributed mapping task. INDEX WORDS: Robotics, Artificial Intelligence, Distributed Processing, Collaborative Robotics DISTRIBUTED COLLABORATIVE ROBOTIC MAPPING by DAVID BARNHARD B.A. Cognitive Science, University of Georgia, 2001 A Thesis Submitted to the Graduate Faculty of The University of Georgia in Partial Fulfillment of the Requirements for the Degree MASTERS OF SCIENCE ATHENS, GEORGIA 2005 © 2005 David Barnhard All Rights Reserved DISTRIBUTED COLLABORATIVE ROBOTIC MAPPING by DAVID BARNHARD Major Professor: Dr. Walter D. Potter Committee: Dr. Khaled Rasheed Dr. Suchendra Bhandarkar Electronic Version Approved: Maureen Grasso Dean of the Graduate School The University of Georgia August 2005 DEDICATION I dedicate this thesis to my lovely betrothed, Rachel. Everyday I wake to hope and wonder because of her. She is my strength and happiness every moment that I am alive. She has continually, but gently kept pushing me to get this project done, and I know without her careful insistence this never would have been completed.