Phys 446: Solid State Physics / Optical Properties Lattice Vibrations: Thermal, Acoustic, and Optical Properties
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Reciprocal Lattice
Appendix A THE RECIPROCAL LATTICE When the translations of a primitive space lattice are denoted by a, b and c, the vector p to any lattice point is given p = ua + vb + we. The definition of the reciprocal lattice is that the translations a*, b* and c*, which define the reciprocal lattice fulfil the following relationships: (A. I) a*.b = b*.c = c*.a = a.b* = b.c* =c. a*= 0 (A.2) It can then be easily shown that: (1) Ic* I = 1/c-spacing of primitive lattice and similarly forb* and a*. (2) a*= (b 1\ c)ja.(b 1\ c) b* = (c 1\ a)jb.(c 1\ a) c* =(a 1\ b)/c-(a 1\ b) These last three relations are often used as a definition of the reciprocal lattice. Two properties of the reciprocal lattice are particularly important: (a) The vector g* defined by g* = ha* + kb* + lc* (where h, k and I are integers to the point hkl in the reciprocal lattice) is normal to the plane of Miller indices (hkl) in the primary lattice. (b) The magnitude Ig* I of this vector is the reciprocal of the spacing of (hkl) in the primary lattice. AI ALLOWED REFLECTIONS The kinematical structure factor for reflections is given by Fhkl = I;J;exp[- 2ni(hu; + kv; + lw)] (A.3) where ui' v; and W; are the coordinates of the atoms and hkl the Miller indices of the reflection g. If there is only one atom at 0, 0, 0 in the unit cell then the structure factor will be independent of hkl since for all values of h, k and I we have Fhkl =f. -

Relativistic Dynamics
Chapter 4 Relativistic dynamics We have seen in the previous lectures that our relativity postulates suggest that the most efficient (lazy but smart) approach to relativistic physics is in terms of 4-vectors, and that velocities never exceed c in magnitude. In this chapter we will see how this 4-vector approach works for dynamics, i.e., for the interplay between motion and forces. A particle subject to forces will undergo non-inertial motion. According to Newton, there is a simple (3-vector) relation between force and acceleration, f~ = m~a; (4.0.1) where acceleration is the second time derivative of position, d~v d2~x ~a = = : (4.0.2) dt dt2 There is just one problem with these relations | they are wrong! Newtonian dynamics is a good approximation when velocities are very small compared to c, but outside of this regime the relation (4.0.1) is simply incorrect. In particular, these relations are inconsistent with our relativity postu- lates. To see this, it is sufficient to note that Newton's equations (4.0.1) and (4.0.2) predict that a particle subject to a constant force (and initially at rest) will acquire a velocity which can become arbitrarily large, Z t ~ d~v 0 f ~v(t) = 0 dt = t ! 1 as t ! 1 . (4.0.3) 0 dt m This flatly contradicts the prediction of special relativity (and causality) that no signal can propagate faster than c. Our task is to understand how to formulate the dynamics of non-inertial particles in a manner which is consistent with our relativity postulates (and then verify that it matches observation, including in the non-relativistic regime). -

The 4 Reciprocal Lattice
4 The Reciprocal Lattice by Andr~ Authier This electronic edition may be freely copied and redistributed for educational or research purposes only. It may not be sold for profit nor incorporated in any product sold for profit without the express pernfission of The Executive Secretary, International Union of Crystallography, 2 Abbey Square, Chester CIII 211[;, [;K Copyright in this electronic ectition (<.)2001 International l.Jnion of Crystallography Published for the International Union of Crystallography by University College Cardiff Press Cardiff, Wales © 1981 by the International Union of Crystallography. All rights reserved. Published by the University College Cardiff Press for the International Union of Crystallography with the financial assistance of Unesco Contract No. SC/RP 250.271 This pamphlet is one of a series prepared by the Commission on Crystallographic Teaching of the International Union of Crystallography, under the General Editorship of Professor C. A. Taylor. Copies of this pamphlet and other pamphlets in the series may be ordered direct from the University College Cardiff Press, P.O. Box 78, Cardiff CF1 1XL, U.K. ISBN 0 906449 08 I Printed in Wales by University College, Cardiff. Series Preface The long term aim of the Commission on Crystallographic Teaching in establishing this pamphlet programme is to produce a large collection of short statements each dealing with a specific topic at a specific level. The emphasis is on a particular teaching approach and there may well, in time, be pamphlets giving alternative teaching approaches to the same topic. It is not the function of the Commission to decide on the 'best' approach but to make all available so that teachers can make their own selection. -
Crystal Structure of a Material Is Way in Which Atoms, Ions, Molecules Are Spatially Arranged in 3-D Space
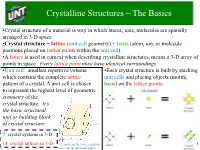
Crystalline Structures – The Basics •Crystal structure of a material is way in which atoms, ions, molecules are spatially arranged in 3-D space. •Crystal structure = lattice (unit cell geometry) + basis (atom, ion, or molecule positions placed on lattice points within the unit cell). •A lattice is used in context when describing crystalline structures, means a 3-D array of points in space. Every lattice point must have identical surroundings. •Unit cell: smallest repetitive volume •Each crystal structure is built by stacking which contains the complete lattice unit cells and placing objects (motifs, pattern of a crystal. A unit cell is chosen basis) on the lattice points: to represent the highest level of geometric symmetry of the crystal structure. It’s the basic structural unit or building block of crystal structure. 7 crystal systems in 3-D 14 crystal lattices in 3-D a, b, and c are the lattice constants 1 a, b, g are the interaxial angles Metallic Crystal Structures (the simplest) •Recall, that a) coulombic attraction between delocalized valence electrons and positively charged cores is isotropic (non-directional), b) typically, only one element is present, so all atomic radii are the same, c) nearest neighbor distances tend to be small, and d) electron cloud shields cores from each other. •For these reasons, metallic bonding leads to close packed, dense crystal structures that maximize space filling and coordination number (number of nearest neighbors). •Most elemental metals crystallize in the FCC (face-centered cubic), BCC (body-centered cubic, or HCP (hexagonal close packed) structures: Room temperature crystal structure Crystal structure just before it melts 2 Recall: Simple Cubic (SC) Structure • Rare due to low packing density (only a-Po has this structure) • Close-packed directions are cube edges. -

Appendix D: the Wave Vector
General Appendix D-1 2/13/2016 Appendix D: The Wave Vector In this appendix we briefly address the concept of the wave vector and its relationship to traveling waves in 2- and 3-dimensional space, but first let us start with a review of 1- dimensional traveling waves. 1-dimensional traveling wave review A real-valued, scalar, uniform, harmonic wave with angular frequency and wavelength λ traveling through a lossless, 1-dimensional medium may be represented by the real part of 1 ω the complex function ψ (xt , ): ψψ(x , t )= (0,0) exp(ikx− i ω t ) (D-1) where the complex phasor ψ (0,0) determines the wave’s overall amplitude as well as its phase φ0 at the origin (xt , )= (0,0). The harmonic function’s wave number k is determined by the wavelength λ: k = ± 2πλ (D-2) The sign of k determines the wave’s direction of propagation: k > 0 for a wave traveling to the right (increasing x). The wave’s instantaneous phase φ(,)xt at any position and time is φφ(,)x t=+−0 ( kx ω t ) (D-3) The wave number k is thus the spatial analog of angular frequency : with units of radians/distance, it equals the rate of change of the wave’s phase with position (with time t ω held constant), i.e. ∂∂φφ k =; ω = − (D-4) ∂∂xt (note the minus sign in the differential expression for ). If a point, originally at (x= xt0 , = 0), moves with the wave at velocity vkφ = ω , then the wave’s phase at that point ω will remain constant: φ(x0+ vtφφ ,) t =++ φ0 kx ( 0 vt ) −=+ ωφ t00 kx The velocity vφ is called the wave’s phase velocity. -

Types of Lattices
Types of Lattices Types of Lattices Lattices are either: 1. Primitive (or Simple): one lattice point per unit cell. 2. Non-primitive, (or Multiple) e.g. double, triple, etc.: more than one lattice point per unit cell. Double r2 cell r1 r2 Triple r1 cell r2 r1 Primitive cell N + e 4 Ne = number of lattice points on cell edges (shared by 4 cells) •When repeated by successive translations e =edge reproduce periodic pattern. •Multiple cells are usually selected to make obvious the higher symmetry (usually rotational symmetry) that is possessed by the 1 lattice, which may not be immediately evident from primitive cell. Lattice Points- Review 2 Arrangement of Lattice Points 3 Arrangement of Lattice Points (continued) •These are known as the basis vectors, which we will come back to. •These are not translation vectors (R) since they have non- integer values. The complexity of the system depends upon the symmetry requirements (is it lost or maintained?) by applying the symmetry operations (rotation, reflection, inversion and translation). 4 The Five 2-D Bravais Lattices •From the previous definitions of the four 2-D and seven 3-D crystal systems, we know that there are four and seven primitive unit cells (with 1 lattice point/unit cell), respectively. •We can then ask: can we add additional lattice points to the primitive lattices (or nets), in such a way that we still have a lattice (net) belonging to the same crystal system (with symmetry requirements)? •First illustrate this for 2-D nets, where we know that the surroundings of each lattice point must be identical. -

EMT UNIT 1 (Laws of Reflection and Refraction, Total Internal Reflection).Pdf
Electromagnetic Theory II (EMT II); Online Unit 1. REFLECTION AND TRANSMISSION AT OBLIQUE INCIDENCE (Laws of Reflection and Refraction and Total Internal Reflection) (Introduction to Electrodynamics Chap 9) Instructor: Shah Haidar Khan University of Peshawar. Suppose an incident wave makes an angle θI with the normal to the xy-plane at z=0 (in medium 1) as shown in Figure 1. Suppose the wave splits into parts partially reflecting back in medium 1 and partially transmitting into medium 2 making angles θR and θT, respectively, with the normal. Figure 1. To understand the phenomenon at the boundary at z=0, we should apply the appropriate boundary conditions as discussed in the earlier lectures. Let us first write the equations of the waves in terms of electric and magnetic fields depending upon the wave vector κ and the frequency ω. MEDIUM 1: Where EI and BI is the instantaneous magnitudes of the electric and magnetic vector, respectively, of the incident wave. Other symbols have their usual meanings. For the reflected wave, Similarly, MEDIUM 2: Where ET and BT are the electric and magnetic instantaneous vectors of the transmitted part in medium 2. BOUNDARY CONDITIONS (at z=0) As the free charge on the surface is zero, the perpendicular component of the displacement vector is continuous across the surface. (DIꓕ + DRꓕ ) (In Medium 1) = DTꓕ (In Medium 2) Where Ds represent the perpendicular components of the displacement vector in both the media. Converting D to E, we get, ε1 EIꓕ + ε1 ERꓕ = ε2 ETꓕ ε1 ꓕ +ε1 ꓕ= ε2 ꓕ Since the equation is valid for all x and y at z=0, and the coefficients of the exponentials are constants, only the exponentials will determine any change that is occurring. -

The Metrical Matrix in Teaching Mineralogy G. V
THE METRICAL MATRIX IN TEACHING MINERALOGY G. V. GIBBS Department of Geological Sciences & Department of Materials Science and Engineering Virginia Polytechnic Institute and State University Blacksburg, VA 24061 [email protected] INTRODUCTION The calculation of the d-spacings, the angles between planes and zones, the bond lengths and angles and other important geometric relationships for a mineral can be a tedious task both for the student and the instructor, particularly when completed with the large as- sortment of trigonometric identities and algebraic formulae that are available (d. Crystal Geometry (1959), Donnay and Donnay, International Tables for Crystallography, Vol. II, Section 3, The Kynoch Press, 101-158). However, such calculations are straightforward and relatively easy to do when completed with the metrical matrix and the interactive software MATOP. Several applications of the matrix are presented below, each of which is worked out in detail and which is designed to teach you its use in the study of crystal geometry. SOME PRELIMINARY COMMENTS We begin our discussion of the matrix with a brief examination of the properties of the geometric three dimensional space, S, in which we live and in which minerals and rocks occur. For our purposes, it will be convenient to view S as the set of all vectors that radiate from a common origin to each point in space. In constructing a model for S, we chose three noncoplanar, coordinate axes denoted X, Y and Z, each radiating from the origin, O. Next, we place three nonzero vectors denoted a, band c along X, Y and Z, respectively, likewise radiating from O. -

Chapter 2 X-Ray Diffraction and Reciprocal Lattice
Chapter 2 X-ray diffraction and reciprocal lattice I. Waves 1. A plane wave is described as Ψ(x,t) = A ei(k⋅x-ωt) A is the amplitude, k is the wave vector, and ω=2πf is the angular frequency. 2. The wave is traveling along the k direction with a velocity c given by ω=c|k|. Wavelength along the traveling direction is given by |k|=2π/λ. 3. When a wave interacts with the crystal, the plane wave will be scattered by the atoms in a crystal and each atom will act like a point source (Huygens’ principle). 4. This formulation can be applied to any waves, like electromagnetic waves and crystal vibration waves; this also includes particles like electrons, photons, and neutrons. A particular case is X-ray. For this reason, what we learn in X-ray diffraction can be applied in a similar manner to other cases. II. X-ray diffraction in real space – Bragg’s Law 1. A crystal structure has lattice and a basis. X-ray diffraction is a convolution of two: diffraction by the lattice points and diffraction by the basis. We will consider diffraction by the lattice points first. The basis serves as a modification to the fact that the lattice point is not a perfect point source (because of the basis). 2. If each lattice point acts like a coherent point source, each lattice plane will act like a mirror. θ θ θ d d sin θ (hkl) -1- 2. The diffraction is elastic. In other words, the X-rays have the same frequency (hence wavelength and |k|) before and after the reflection. -

Group Velocity
Particle Waves and Group Velocity Particles with known energy Consider a particle with mass m, traveling in the +x direction and known velocity 1 vo and energy Eo = mvo . The wavefunction that represents this particle is: 2 !(x,t) = Ce jkxe" j#t [1] where C is a constant and 2! 1 ko = = 2mEo [2] "o ! Eo !o = 2"#o = [3] ! 2 The envelope !(x,t) of this wavefunction is 2 2 !(x,t) = C , which is a constant. This means that when a particle’s energy is known exactly, it’s position is completely unknown. This is consistent with the Heisenberg Uncertainty principle. Even though the magnitude of this wave function is a constant with respect to both position and time, its phase is not. As with any type of wavefunction, the phase velocity vp of this wavefunction is: ! E / ! v v = = o = E / 2m = v2 / 4 = o [4] p k 1 o o 2 2mEo ! At first glance, this result seems wrong, since we started with the assumption that the particle is moving at velocity vo. However, only the magnitude of a wavefunction contains measurable information, so there is no reason to believe that its phase velocity is the same as the particle’s velocity. Particles with uncertain energy A more realistic situation is when there is at least some uncertainly about the particle’s energy and momentum. For real situations, a particle’s energy will be known to lie only within some band of uncertainly. This can be handled by assuming that the particle’s wavefunction is the superposition of a range of constant-energy wavefunctions: jkn x # j$nt !(x,t) = "Cn (e e ) [5] n Here, each value of kn and ωn correspond to energy En, and Cn is the probability that the particle has energy En. -

Lecture Notes
Solid State Physics PHYS 40352 by Mike Godfrey Spring 2012 Last changed on May 22, 2017 ii Contents Preface v 1 Crystal structure 1 1.1 Lattice and basis . .1 1.1.1 Unit cells . .2 1.1.2 Crystal symmetry . .3 1.1.3 Two-dimensional lattices . .4 1.1.4 Three-dimensional lattices . .7 1.1.5 Some cubic crystal structures ................................ 10 1.2 X-ray crystallography . 11 1.2.1 Diffraction by a crystal . 11 1.2.2 The reciprocal lattice . 12 1.2.3 Reciprocal lattice vectors and lattice planes . 13 1.2.4 The Bragg construction . 14 1.2.5 Structure factor . 15 1.2.6 Further geometry of diffraction . 17 2 Electrons in crystals 19 2.1 Summary of free-electron theory, etc. 19 2.2 Electrons in a periodic potential . 19 2.2.1 Bloch’s theorem . 19 2.2.2 Brillouin zones . 21 2.2.3 Schrodinger’s¨ equation in k-space . 22 2.2.4 Weak periodic potential: Nearly-free electrons . 23 2.2.5 Metals and insulators . 25 2.2.6 Band overlap in a nearly-free-electron divalent metal . 26 2.2.7 Tight-binding method . 29 2.3 Semiclassical dynamics of Bloch electrons . 32 2.3.1 Electron velocities . 33 2.3.2 Motion in an applied field . 33 2.3.3 Effective mass of an electron . 34 2.4 Free-electron bands and crystal structure . 35 2.4.1 Construction of the reciprocal lattice for FCC . 35 2.4.2 Group IV elements: Jones theory . 36 2.4.3 Binding energy of metals . -

Double Negative Dispersion Relations from Coated Plasmonic Rods∗
MULTISCALE MODEL. SIMUL. c 2013 Society for Industrial and Applied Mathematics Vol. 11, No. 1, pp. 192–212 DOUBLE NEGATIVE DISPERSION RELATIONS FROM COATED PLASMONIC RODS∗ YUE CHEN† AND ROBERT LIPTON‡ Abstract. A metamaterial with frequency dependent double negative effective properties is constructed from a subwavelength periodic array of coated rods. Explicit power series are developed for the dispersion relation and associated Bloch wave solutions. The expansion parameter is the ratio of the length scale of the periodic lattice to the wavelength. Direct numerical simulations for finite size period cells show that the leading order term in the power series for the dispersion relation is a good predictor of the dispersive behavior of the metamaterial. Key words. metamaterials, dispersion relations, Bloch waves, simulations AMS subject classifications. 35Q60, 68U20, 78A48, 78M40 DOI. 10.1137/120864702 1. Introduction. Metamaterials are artificial materials designed to have elec- tromagnetic properties not generally found in nature. One contemporary area of research explores novel subwavelength constructions that deliver metamaterials with both a negative bulk dielectric constant and bulk magnetic permeability across cer- tain frequency intervals. These double negative materials are promising materials for the creation of negative index superlenses that overcome the small diffraction limit and have great potential in applications such as biomedical imaging, optical lithography, and data storage. The early work of Veselago [39] identified novel ef- fects associated with hypothetical materials for which both the dielectric constant and magnetic permeability are simultaneously negative. Such double negative media support electromagnetic wave propagation in which the phase velocity is antiparallel to the direction of energy flow and other unusual electromagnetic effects, such as the reversal of the Doppler effect and Cerenkov radiation.