Safety-Related Analysis and Simulation of High Speed, Guided, Ground Transportation Systems Task 1, Volume I: State of the Art
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Federal Railroad Administration Office of Safety Headquarters Assigned Accident Investigation Report HQ-2006-88
Federal Railroad Administration Office of Safety Headquarters Assigned Accident Investigation Report HQ-2006-88 Union Pacific Midas, CA November 9, 2006 Note that 49 U.S.C. §20903 provides that no part of an accident or incident report made by the Secretary of Transportation/Federal Railroad Administration under 49 U.S.C. §20902 may be used in a civil action for damages resulting from a matter mentioned in the report. DEPARTMENT OF TRANSPORTATION FRA FACTUAL RAILROAD ACCIDENT REPORT FRA File # HQ-2006-88 FEDERAL RAILROAD ADMINISTRATION 1.Name of Railroad Operating Train #1 1a. Alphabetic Code 1b. Railroad Accident/Incident No. Union Pacific RR Co. [UP ] UP 1106RS011 2.Name of Railroad Operating Train #2 2a. Alphabetic Code 2b. Railroad Accident/Incident N/A N/A N/A 3.Name of Railroad Responsible for Track Maintenance: 3a. Alphabetic Code 3b. Railroad Accident/Incident No. Union Pacific RR Co. [UP ] UP 1106RS011 4. U.S. DOT_AAR Grade Crossing Identification Number 5. Date of Accident/Incident 6. Time of Accident/Incident Month Day Year 11 09 2006 11:02: AM PM 7. Type of Accident/Indicent 1. Derailment 4. Side collision 7. Hwy-rail crossing 10. Explosion-detonation 13. Other (single entry in code box) 2. Head on collision 5. Raking collision 8. RR grade crossing 11. Fire/violent rupture (describe in narrative) 3. Rear end collision 6. Broken Train collision 9. Obstruction 12. Other impacts 01 8. Cars Carrying 9. HAZMAT Cars 10. Cars Releasing 11. People 12. Division HAZMAT Damaged/Derailed HAZMAT Evacuated 0 0 0 0 Roseville 13. Nearest City/Town 14. -

About Suspension of Some Trains
About suspension of some trains Some trains will be suspended considering the transport of passengers due to the outbreak of the Novel Coronavirus. *Please note that further suspension may be subject to occur. 【Suspended Kyushu Shinkansen】 (May 11 – 31) ○Kumamoto for Kagoshima-Chūō ※Service between Kumamoto and Shin-Osaka is available. Name of train Kumamoto Kagoshima-Chūō Day of suspension SAKURA 545 10:34 11:20 May 11~31 SAKURA 555 15:23 16:10 May 11~31 SAKURA 409 12:18 13:15 May 11~31 ○Kagoshima-Chūō for Kumamoto ※Service between Kumamoto and Shin-Osaka is available. Name of train Kagoshima-Chūō Kumamoto Day of suspension SAKURA 554 11:34 12:20 May 11~31 SAKURA 562 14:35 15:20 May 11~31 SAKURA 568 17:18 18:03 May 11~31 MIZUHO 612 18:04 18:48 May 11~31 【Suspended Hokuriku Shinkansen】 (May 1 – 31) ○Tōkyō for Kanazawa Name of train Tōkyō Kanazawa Day of suspension KAGAYAKI 521 8:12 10:47 May 1~31 KAGAYAKI 523 10:08 12:43 May 2. 9. 16. 23. 30 KAGAYAKI 525 10:48 13:23 May 1~4. 9. 16. 23. 30 KAGAYAKI 527 11:48 14:25 May 2. 3. 5. 6 KAGAYAKI 529 12:48 15:26 May 2~6 KAGAYAKI 531 13:52 16:26 May 1. 3~6. 8. 15. 22. 29. 31 KAGAYAKI 533 14:52 17:26 May 1. 8~10. 15~17. 22~24. 29~31 KAGAYAKI 535 17:04 19:41 May 2~6 KAGAYAKI 539 19:56 22:30 May 1~6. -

Uredas, URGENT EARTHQUAKE DETECTION and ALARM SYSTEM, NOW and FUTURE
13th World Conference on Earthquake Engineering Vancouver, B.C., Canada August 1-6, 2004 Paper No. 908 UrEDAS, URGENT EARTHQUAKE DETECTION AND ALARM SYSTEM, NOW AND FUTURE Yutaka NAKAMURA 1 SUMMARY UrEDAS, Urgent Earthquake Detection and Alarm System, can realize the real-time early earthquake detection and alarm system in the world. There is a local government that has realized a tsunami warning system using real-time estimated earthquake parameters as magnitude and location, distributed by UrEDAS. On 26th May 2003, the Miyagiken-Oki Earthquake was occurred. It was so large that the maximum acceleration of about 600 Gal was observed along the Shinkansen line and 23 columns of the rigid frame viaducts (RC) were severely cracked. This earthquake occurred on the business hours of the Shinkansen. As expected, coastline “Compact UrEDAS” along the Shinkansen took out the early P-wave alarm before the destructive earthquake motion and the validity of this system was proved for the first time. INTRODUCTION UrEDAS is the only real time P-wave alarm system over the world on practical use. It is characterized to be able to process digitized waveform step by step without saving. Amount of procedure does not differs either earthquake occurs or not, so failure because of over load will not occur. The 2003 Miyagiken-Oki earthquake (Mj 7.1) occurred on 26th May, Compact UrEDAS worked as expected. It was for the first time that the validity of the early warning system was verified under circumstances of big earthquake such as rigid frame viaducts of Shinkansen were damaged. In this paper, the present condition of P-wave early detection system UrEDAS will be viewed referring to cases at work, also result of test observation where faults exists will be reported. -
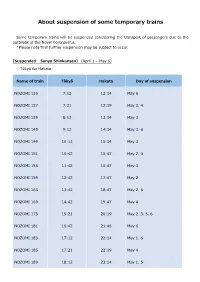
About Suspension of Some Temporary Trains(Translation:PDF76KB)
About suspension of some temporary trains Some temporary trains will be suspended considering the transport of passengers due to the outbreak of the Novel Coronavirus. *Please note that further suspension may be subject to occur. 【Suspended Sanyo Shinkansen】 (April 1 – May 6) ○Tōkyō for Hakata Name of train Tōkyō Hakata Day of suspension NOZOMI 135 7:12 12:14 May 6 NOZOMI 137 7:21 12:19 May 3. 4 NOZOMI 139 8:12 13:14 May 3 NOZOMI 145 9:12 14:14 May 3. 6 NOZOMI 149 10:12 15:14 May 3 NOZOMI 151 10:42 15:47 May 2. 4 NOZOMI 155 11:42 16:47 May 3 NOZOMI 159 12:42 17:47 May 2 NOZOMI 163 13:42 18:47 May 2. 6 NOZOMI 169 14:42 19:47 May 4 NOZOMI 173 15:21 20:19 May 2. 3. 5. 6 NOZOMI 181 16:42 21:46 May 6 NOZOMI 183 17:12 22:14 May 1. 6 NOZOMI 185 17:21 22:19 May 4 NOZOMI 189 18:12 23:14 May 1. 5 ○Hakata for Tōkyō Name of train Hakata Tōkyō Day of suspension NOZOMI 136 7:58 13:03 May 3 NOZOMI 138 8:31 13:33 May 1 NOZOMI 140 8:58 14:03 May 2. 3. 5. 6 NOZOMI 144 9:58 15:03 May 2. 3. 5. 6 NOZOMI 150 11:31 16:33 May 2. 5 NOZOMI 152 11:58 17:03 May 4 NOZOMI 156 12:58 18:03 May 3 NOZOMI 160 13:31 18:33 May 4 NOZOMI 170 15:31 20:33 May 2. -

September – November 1998
Topics September – November 1998 2 September –– Swiss Air MD11 en route tional Airport in Ho Chi Minh City, southern 27 September –– DC10 Aircraft of Japan to Geneva from New York crashed into Vietnam Airlines en route from Sendai to Hawaii hit Atlantic off coast of Nova Scotia, Canada, turbulence over Pacific injuring 11 passen- killing all 229 passengers and crew on board 19 September –– Inaugural flight of gers Skymark Airlines Boeing 767-300 between 2 September –– Last four wagons of freight Haneda and Fukuoka as first new airline to 29 September –– Lion Airlines Antonov car- train belonging to The Burlington Northern enter Japan’s newly deregulated domestic rying 54 crew and passengers destined for Santa Fe Railway derailed en route to Los market in 35 years. Fare of ¥13,700 (50% Colombo lost immediately after take-off from Angeles causing explosion and fire but no lower than recommended fare) achieved by Jaffna Airport, northern Sri Lanka injuries hiring foreign pilots and offering simpler in- flight services 6 October –– JR East celebrated 1 billion 3 September –– Maintenance wagon col- passengers carried on three shinkansen lided with ballast-spreading train on out- 23 September –– JR East and Shiki Theat- over 16 years of operation. Tohoku bound track of Aioi–Okayama section of rical Company inaugurated performing arts Shinkansen carried approximately 656 mil- Sanyo Shinkansen delaying 18 shinkansen complex in Hamamatsu-cho, Tokyo, as first lion passengers, Joetsu Shinkansen 335 trains including Nozomi by up to 50 minutes permanent -

Bilevel Rail Car - Wikipedia
Bilevel rail car - Wikipedia https://en.wikipedia.org/wiki/Bilevel_rail_car Bilevel rail car The bilevel car (American English) or double-decker train (British English and Canadian English) is a type of rail car that has two levels of passenger accommodation, as opposed to one, increasing passenger capacity (in example cases of up to 57% per car).[1] In some countries such vehicles are commonly referred to as dostos, derived from the German Doppelstockwagen. The use of double-decker carriages, where feasible, can resolve capacity problems on a railway, avoiding other options which have an associated infrastructure cost such as longer trains (which require longer station Double-deck rail car operated by Agence métropolitaine de transport platforms), more trains per hour (which the signalling or safety in Montreal, Quebec, Canada. The requirements may not allow) or adding extra tracks besides the existing Lucien-L'Allier station is in the back line. ground. Bilevel trains are claimed to be more energy efficient,[2] and may have a lower operating cost per passenger.[3] A bilevel car may carry about twice as many as a normal car, without requiring double the weight to pull or material to build. However, a bilevel train may take longer to exchange passengers at each station, since more people will enter and exit from each car. The increased dwell time makes them most popular on long-distance routes which make fewer stops (and may be popular with passengers for offering a better view).[1] Bilevel cars may not be usable in countries or older railway systems with Bombardier double-deck rail cars in low loading gauges. -

Shinkansen Bullet Train
Jōetsu Shinkansen (333.9 km) Train Names: TOKI, TANIGAWA Max-TOKI, Max-TANIGAWA JAPAN RAIL PASS Can also be Used for Shinkansen Jōetsu Shinkansen "Max-TOKI"etc. “bullet train” Travel Akita Shinkansen "KOMACHI" Akita Shinkansen (662.6 km) Train Name: KOMACHI Akita Shin-Aomori Yamagata Shinkansen "TSUBASA" Hokuriku Shinkansen (450.5 km) Yamagata Shinkansen Train Names: KAGAYAKI, HAKUTAKA, (421.4 km) Shinjo¯ Morioka TSURUGI, ASAMA Train Name: TSUBASA Niigata Yamagata Sendai Kanazawa Toyama Nagano Hokuriku Shinkansen "KAGAYAKI"etc. Fukushima Takasaki Omiya¯ Sanyō & Kyūshū Shinkansen "SAKURA" Sanyō Shinkansen (622.3 km) Train Names: NOZOMI*, MIZUHO*, Tōhoku Shinkansen "HAYABUSA "etc. Tōkaidō & Sanyō Shinkansen "HIKARI" HIKARI (incl. HIKARI Rail Star), SAKURA, KODAMA Tōkaidō Shinkansen (552.6 km) (Tōkyō thru Hakata, 1,174.9km) Train Names: NOZOMI*, HIKARI, KODAMA Hakata Kokura Hiroshima Okayama Shin-Osaka¯ Kyōto Nagoya Shin-Yokohama Shinagawa Tokyo¯ ¯ * There are six types of train services, “NOZOMI,” “MIZUHO,” “HIKARI,” “SAKURA,” “KODAMA” and “TSUBAME” trains on the Tōkaidō, Sanyō and Kyūshū Shinkansen, and the stations at which trains stop vary with train types. The JAPAN RAIL PASS is only valid for “HIKARI,” “SAKURA,” “KODAMA” Tōhoku Shinkansen "HAYATE," "YAMABIKO,"etc. and “TSUBAME” trains, and not valid for any seats, reserved or non-reserved, on “NOZOMI” and “MIZUHO” trains. To travel on the Tōkaidō, Sanyō and Kyūshū Shinkansen, the pass holders must take Tōhoku Shinkansen (713.7 km) “HIKARI,” “SAKURA,” “KODAMA” or “TSUBAME” trains, or -

Case of High-Speed Ground Transportation Systems
MANAGING PROJECTS WITH STRONG TECHNOLOGICAL RUPTURE Case of High-Speed Ground Transportation Systems THESIS N° 2568 (2002) PRESENTED AT THE CIVIL ENGINEERING DEPARTMENT SWISS FEDERAL INSTITUTE OF TECHNOLOGY - LAUSANNE BY GUILLAUME DE TILIÈRE Civil Engineer, EPFL French nationality Approved by the proposition of the jury: Prof. F.L. Perret, thesis director Prof. M. Hirt, jury director Prof. D. Foray Prof. J.Ph. Deschamps Prof. M. Finger Prof. M. Bassand Lausanne, EPFL 2002 MANAGING PROJECTS WITH STRONG TECHNOLOGICAL RUPTURE Case of High-Speed Ground Transportation Systems THÈSE N° 2568 (2002) PRÉSENTÉE AU DÉPARTEMENT DE GÉNIE CIVIL ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE PAR GUILLAUME DE TILIÈRE Ingénieur Génie-Civil diplômé EPFL de nationalité française acceptée sur proposition du jury : Prof. F.L. Perret, directeur de thèse Prof. M. Hirt, rapporteur Prof. D. Foray, corapporteur Prof. J.Ph. Deschamps, corapporteur Prof. M. Finger, corapporteur Prof. M. Bassand, corapporteur Document approuvé lors de l’examen oral le 19.04.2002 Abstract 2 ACKNOWLEDGEMENTS I would like to extend my deep gratitude to Prof. Francis-Luc Perret, my Supervisory Committee Chairman, as well as to Prof. Dominique Foray for their enthusiasm, encouragements and guidance. I also express my gratitude to the members of my Committee, Prof. Jean-Philippe Deschamps, Prof. Mathias Finger, Prof. Michel Bassand and Prof. Manfred Hirt for their comments and remarks. They have contributed to making this multidisciplinary approach more pertinent. I would also like to extend my gratitude to our Research Institute, the LEM, the support of which has been very helpful. Concerning the exchange program at ITS -Berkeley (2000-2001), I would like to acknowledge the support of the Swiss National Science Foundation. -
How Understanding a Railway's Historic Evolution Can Guide Future
College of Engineering, School of Civil Engineering University of Birmingham Managing Technical and Operational Change: How understanding a railway’s historic evolution can guide future development: A London Underground case study. by Piers Connor Submitted as his PhD Thesis DATE: 15th February 2017 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. Managing Technical & Operational Development PhD Thesis Abstract The argument for this thesis is that patterns of past engineering and operational development can be used to support the creation of a good, robust strategy for future development and that, in order to achieve this, a corporate understanding of the history of the engineering, operational and organisational changes in the business is essential for any evolving railway undertaking. It has been the objective of the author of this study to determine whether it is essential that the history and development of a railway undertaking be known and understood by its management and staff in order for the railway to function in an efficient manner and for it to be able to develop robust and appropriate improvement strategies in a cost-effective manner. -

Amtrak Cascades Fleet Management Plan
Amtrak Cascades Fleet Management Plan November 2017 Funding support from Americans with Disabilities Act (ADA) Information The material can be made available in an alternative format by emailing the Office of Equal Opportunity at [email protected] or by calling toll free, 855-362-4ADA (4232). Persons who are deaf or hard of hearing may make a request by calling the Washington State Relay at 711. Title VI Notice to Public It is the Washington State Department of Transportation’s (WSDOT) policy to assure that no person shall, on the grounds of race, color, national origin or sex, as provided by Title VI of the Civil Rights Act of 1964, be excluded from participation in, be denied the benefits of, or be otherwise discriminated against under any of its federally funded programs and activities. Any person who believes his/her Title VI protection has been violated, may file a complaint with WSDOT’s Office of Equal Opportunity (OEO). For additional information regarding Title VI complaint procedures and/or information regarding our non-discrimination obligations, please contact OEO’s Title VI Coordinator at 360-705-7082. The Oregon Department of Transportation ensures compliance with Title VI of the Civil Rights Act of 1964; 49 CFR, Part 21; related statutes and regulations to the end that no person shall be excluded from participation in or be denied the benefits of, or be subjected to discrimination under any program or activity receiving federal financial assistance from the U.S. Department of Transportation on the grounds of race, color, sex, disability or national origin. -

Opening of Tohoku Shinkansen Extension to Shin Aomori and Development of New Faster Carriages—Overview of Series E5/E6 Shinichiro Tajima
Expansion of High-Speed Rail Services Opening of Tohoku Shinkansen Extension to Shin Aomori and Development of New Faster Carriages—Overview of Series E5/E6 Shinichiro Tajima Introduction FASTECH 360 Z were started in June 2010. These carriages will be coupled with Series E5 carriages in commercial In preparation for the December 2010 opening of the Tohoku operation to run at 320 km/h. Shinkansen extension to Shin Aomori, JR East worked steadily from 2002 on technologies to increase speed, Path to Speed Increase finally settling on a commercial operating speed of 320 km/h after various considerations, including running tests using The Tohoku Shinkansen started operation in 1982 at a the FASTECH 360 test train. Furthermore, Series E5 pre- maximum speed of 210 km/h. Today, the commercial production models were built to determine the specifications operation speed is 275 km/h but 20 years have passed since of carriages used for commercial operations; running tests the first 275 km/h operation with Series 200 carriages on the confirmed the final specifications ahead of introduction of the Joetsu Shinkansen in 1990. Full-scale operation at 275 km/h Series E5 in spring 2011. Moreover, Series E6 pre-production started with the introduction of the E3 and E2 at the opening models reflecting development successes using the of the Akita Shinkansen and Nagano Shinkansen in 1997. Figure 1 Path to Speed Increase km/h 450 JNR JR 425 km/h (STAR21, 1993) Max. test speed 400 345.8 km/h (400 series, 1991) 350 319 km/h 320 km/h (961 series, 1979) 300 km/h (2013) (2011) 300 275 km/h (1990) Max. -

Federal Railroad Administration Office of Safety Headquarters Assigned Accident Investigation Report HQ-2007-55
Federal Railroad Administration Office of Safety Headquarters Assigned Accident Investigation Report HQ-2007-55 Amtrak/Union Pacific (ATK/UP) Martinez, California October 1, 2007 Note that 49 U.S.C. §20903 provides that no part of an accident or incident report made by the Secretary of Transportation/Federal Railroad Administration under 49 U.S.C. §20902 may be used in a civil action for damages resulting from a matter mentioned in the report. DEPARTMENT OF TRANSPORTATION FRA FACTUAL RAILROAD ACCIDENT REPORT FRA File # HQ-2007-55 FEDERAL RAILROAD ADMINISTRATION 1.Name of Railroad Operating Train #1 1a. Alphabetic Code 1b. Railroad Accident/Incident No. Amtrak [ATK ] ATK 105753 2.Name of Railroad Operating Train #2 2a. Alphabetic Code 2b. Railroad Accident/Incident No. Union Pacific RR Co. [UP ] UP 1007RS003 3.Name of Railroad Operating Train #3 3a. Alphabetic Code 3b. Railroad Accident/Incident No. N/A N/A N/A 4.Name of Railroad Responsible for Track Maintenance: 4a. Alphabetic Code 4b. Railroad Accident/Incident No. Union Pacific RR Co. [UP ] UP 1007RS003 5. U.S. DOT_AAR Grade Crossing Identification Number 6. Date of Accident/Incident 7. Time of Accident/Incident Month 10 Day 01 Year 2007 05:35: AM PM 8. Type of Accident/Indicent 1. Derailment 4. Side collision 7. Hwy-rail crossing 10. Explosion-detonation 13. Other Code (single entry in code box) 2. Head on collision 5. Raking collision 8. RR grade crossing 11. Fire/violent rupture (describe in narrative) 3. Rear end collision 6. Broken Train collision 9. Obstruction 12. Other impacts 09 9.