Mp-Avt-146-16
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Innovation in Ecosystem Business Models: an Application to Maas and Autonomous Vehicles in Urban Mobility System
Innovation in ecosystem business models : An application to MaaS and Autonomous vehicles in urban mobility system Rodrigo Gandia To cite this version: Rodrigo Gandia. Innovation in ecosystem business models : An application to MaaS and Autonomous vehicles in urban mobility system. Economics and Finance. Université Paris-Saclay; University of Lavras, UFLA (Brésil), 2020. English. NNT : 2020UPASC018. tel-02895349 HAL Id: tel-02895349 https://tel.archives-ouvertes.fr/tel-02895349 Submitted on 9 Jul 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Innovation in Ecosystem Business Models: An Application to MaaS and Autonomous Vehicles in Urban Mobility System Thèse de doctorat de l'université Paris-Saclay École doctorale n° 573 Interfaces : approches interdisciplinaires, fon- dements, applications et innovation (Interfaces) Spécialité de doctorat : Ingénierie des systèmes complexes Unité de recherche : Université Paris-Saclay, CentraleSupélec, Laboratoire Genie Industriel, 91190, Gif-sur-Yvette, France. Référent : CentraleSupélec Thèse présentée et -

Autonomous Vehicle, Sensing and Communication Survey 1 Introduction
Autonomous Vehicle, Sensing and Communication Survey Edited and submitted by Shraga Shoval Prepared by Shlomi Hacohen and Oded Medina Department of Mechanical Engineering, Ariel University, Ariel, Israel. August 2020 Abstract Autonomous vehicles introduce dramatic changes to the way in which we travel. This technology has the potential to impact the transportation across a wide array of categories including safety, congestion, and travel behavior. In this report we review the main issues involved in autonomous driving as discussed in the literature and shed light on topics that we believe require further development. 1 Introduction The challenges in autonomous driving require a combination of many capabilities, among them: localization, motion planning, vehicle’s systems control (steering, acceleration/deceleration, signaling, etc.), road perception, prediction of other road-users behavior, awareness of dangers, etc. These capabilities have a various level of importance for various levels of driving automation. Even though the first autonomous vehicle (AV) was experimented in 1926 [104], a real-modern autonomous vehicle was first presented in 1986 by a team from Carnegie Mellon University [58]. Since 2010, many major automotive manufacturers, such as GM, Mercedes Benz, Ford, Toyota, and many more are developing AVs [90]. A demonstration of AV equipped with numerous sensors and communication systems was presented by Toyota in 2013 [10]. In 2016, Google’s AV has passed over one million kilometers. These events present a glimpse to the landmarks in the development of AV that, due to the complexity of the task, progresses slowly with considerable amount of attention to safety and reliability. AVs need a large amount of data for reliable decision making. -
An Off-Road Autonomous Vehicle for DARPA's Grand Challenge
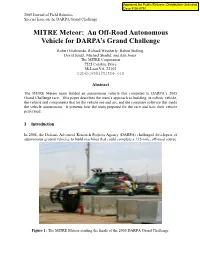
2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge MITRE Meteor: An Off-Road Autonomous Vehicle for DARPA’s Grand Challenge Robert Grabowski, Richard Weatherly, Robert Bolling, David Seidel, Michael Shadid, and Ann Jones. The MITRE Corporation 7525 Colshire Drive McLean VA, 22102 [email protected] Abstract The MITRE Meteor team fielded an autonomous vehicle that competed in DARPA’s 2005 Grand Challenge race. This paper describes the team’s approach to building its robotic vehicle, the vehicle and components that let the vehicle see and act, and the computer software that made the vehicle autonomous. It presents how the team prepared for the race and how their vehicle performed. 1 Introduction In 2004, the Defense Advanced Research Projects Agency (DARPA) challenged developers of autonomous ground vehicles to build machines that could complete a 132-mile, off-road course. Figure 1: The MITRE Meteor starting the finals of the 2005 DARPA Grand Challenge. 2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge 195 teams applied – only 23 qualified to compete. Qualification included demonstrations to DARPA and a ten-day National Qualifying Event (NQE) in California. The race took place on October 8 and 9, 2005 in the Mojave Desert over a course containing gravel roads, dirt paths, switchbacks, open desert, dry lakebeds, mountain passes, and tunnels. The MITRE Corporation decided to compete in the Grand Challenge in September 2004 by sponsoring the Meteor team. They believed that MITRE’s work programs and military sponsors would benefit from an understanding of the technologies that contribute to the DARPA Grand Challenge. -

Using Fuzzy Logic in Automated Vehicle Control
Intelligent Transportation Systems Using Fuzzy Logic in Automated Vehicle Control José E. Naranjo, Carlos González, Ricardo García, and Teresa de Pedro, Instituto de Automática Industrial Miguel A. Sotelo, Universidad de Alcalá de Henares ntil recently, in-vehicle computing has been largely relegated to auxiliary U tasks such as regulating cabin temperature, opening doors, and monitoring Automated versions fuel, oil, and battery-charge levels. Now, however, computers are increasingly assum- of a mass-produced ing driving-related tasks in some commercial models. Among those tasks are vehicle use fuzzy logic • maintaining a reference velocity or keeping a safe nomous robots and fuzzy control systems and the distance from other vehicles, Universidad de Alcalá de Henares’s knowledge of techniques to both • improving night vision with infrared cameras, and artificial vision. (The “Intelligent-Vehicle Systems” • building maps and providing alternative routes. sidebar discusses other such projects.) We’re devel- address common oping a testbed infrastructure for vehicle driving that Still, many traffic situations remain complex and includes control-system experimentation, strategies, challenges and difficult to manage, particularly in urban settings. and sensors. All of our facilities and instruments are The driving task belongs to a class of problems that available for collaboration with other research groups incorporate human depend on underlying systems for logical reasoning in this field. So far, we’ve automated and instru- and dealing with uncertainty. So, to move vehicle mented two Citroën Berlingo mass-produced vans procedural knowledge computers beyond monitoring and into tasks related to carry out our objectives. to environment perception or driving, we must inte- into the vehicle control grate aspects of human intelligence and behaviors Automated-vehicle equipment so that vehicles can manage driving actuators in a Figure 1 shows two mass-produced electric Cit- algorithms. -

Oshkosh Corporation
AT-A-GLANCE Oshkosh Corporation is a leading designer, The top priorities of our 13,800 team members manufacturer and marketer of a broad range are to serve and delight our customers as well of access equipment, specialty military, fire & as drive superior operating performance to emergency and commercial vehicles and vehicle benefit our shareholders. We do this through bodies. Our products are valued worldwide by rental execution of our MOVE strategy and by leveraging companies, defense forces, concrete placement our strengths and resources in engineering, and refuse businesses, fire & emergency departments manufacturing, purchasing and distribution and municipal and airport services, where high across our four business segments. quality, superior performance, rugged reliability and long-term value are paramount. Approximately 24% of our revenues came from outside the United States in fiscal 2016 and we We partner with our customers to deliver superior have manufacturing operations in eight U.S. states solutions that safely and efficiently move people and in Australia, Belgium, Canada, China, France, and materials at work, around the globe and around Mexico, Romania and the United Kingdom as well the clock. as operations to support sales or deliver service in over 150 countries. We believe our business model makes us a different integrated global industrial and supports our Our company was founded in 1917 and we look goals of driving superior value for both customers forward to celebrating our 100th anniversary in and shareholders. Our business model brings 2017. We are proud of our strong culture and together a unique set of integrated capabilities and operating performance that contribute to our diverse end markets to position our company to be positive outlook as we prepare to celebrate 100 successful in a variety of economic environments. -
The Terramax Autonomous Vehicle Concludes the 2005 DARPA Grand Challenge
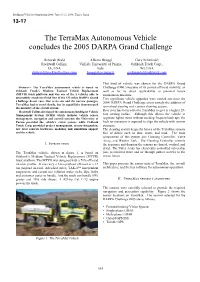
Intelligent Vehicles Symposium 2006, June 13-15, 2006, Tokyo, Japan 13-17 The TerraMax Autonomous Vehicle concludes the 2005 DARPA Grand Challenge Deborah Braid Alberto Broggi Gary Schmiedel Rockwell Collins, VisLab, University of Parma, Oshkosh Truck Corp., IA, USA Italy WI, USA [email protected] [email protected] [email protected] This kind of vehicle was chosen for the DARPA Grand Abstract— The TerraMax autonomous vehicle is based on Challenge (DGC) because of its proven off-road mobility, as Oshkosh Truck’s Medium Tactical Vehicle Replacement well as for its direct applicability to potential future (MTVR) truck platform and was one of the 5 vehicles able to autonomous missions. successfully reach the finish line of the 132 miles DARPA Grand Two significant vehicle upgrades were carried out since the Challenge desert race. Due to its size and the narrow passages, 2004 DARPA Grand Challenge event namely the addition of TerraMax had to travel slowly, but its capabilities demonstrated rear-wheel steering and a sensor cleaning system. the maturity of the overall system. Rear steer has been added to TerraMax to give it a tighter 29- Rockwell Collins developed the autonomous intelligent Vehicle Management System (iVMS) which includes vehicle sensor foot turning radius. Although this allows the vehicle to management, navigation and control systems; the University of negotiate tighter turns without needing frequent back ups, the Parma provided the vehicle’s vision system, while Oshkosh back up maneuver is required to align the vehicle with narrow Truck Corp. provided project management, system integration, passages. low level controls hardware, modeling and simulation support The cleaning system keeps the lenses of the TerraMax sensors and the vehicle. -

Connected and Autonomous Vehicles: Implications for Policy and Practice in City and Transportation Planning
Connected and Autonomous Vehicles: Implications for Policy and Practice in City and Transportation Planning by Charles Ng supervised by Laura Taylor A Major Paper submitted to the Faculty of Environmental Studies in partial fulfillment of the requirements for the degree of Master in Environmental Studies York University, Toronto, Ontario, Canada December 8, 2017 Acknowledgments This paper could not have been completed without the help and support of the caring individuals that I am thankful to have in my life. I would like to thank and acknowledge my mother, Maria, and my sister, Ka Lang for providing me with love and support; my advisor, Peter Timmerman, and my supervisor, Laura Taylor, for providing me with academic and non-academic support; and my invaluable friends that I have made in the MES program for their encouragement, support and relief. i Foreword My Area of Concentration for my Plan of Study is sustainable transportation planning for growth management. Connected and Autonomous Vehicles will change the urban landscape, the roles of governments and present new challenges to planners. This paper has allowed me to view transportation planning through the lens of emerging technologies and how this affects cities in the short and long term. There are many sustainability and growth management implications with Connected and Autonomous Vehicles. For example, automated vehicles can foster decentralization because it easily enables travel however, if utilized correctly, automated vehicles can also compliment local transit systems to support intensification. This is especially important in Ontario (Canada’s first province to allow testing of autonomous vehicles on public roads) as it directly relates to the goals and policies related to sprawl and sustainability as outlined in Ontario’s four provincial land use plans: The Growth Plan for the Greater Golden Horseshoe (GGH), The Greenbelt Plan, The Oak Ridges Moraine Conservation Plan and the Niagara Escarpment Plan. -

State-Of-The-Art Remote Sensing Geospatial Technologies In
STATE-OF-THE-ART REMOTE SENSING GEOSPATIAL TECHNOLOGIES IN SUPPORT OF TRANSPORTATION MONITORING AND MANAGEMENT DISSERTATION Presented in Partial Fulfillment of the Requirements for The Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Eva Petra Paska, M.S. ***** The Ohio State University 2009 Dissertation Committee: Approved by Dr. Dorota Grejner-Brzezinska, Adviser Dr. Mark McCord ____________________________________ Dr. Alper Yilmaz Adviser Dr. Charles K. Toth, Co-Adviser Geodetic Science and Surveying Graduate Program ABSTRACT The widespread use of digital technologies, combined with rapid sensor advancements resulted in a paradigm shift in geospatial technologies the end of the last millennium. The improved performance provided by the state-of-the-art airborne remote sensing technology created opportunities for new applications that require high spatial and temporal resolution data. Transportation activities represent a major segment of the economy in industrialized nations. As such both the transportation infrastructure and traffic must be carefully monitored and planned. Engineering scale topographic mapping has been a long-time geospatial data user, but the high resolution geospatial data could also be considered for vehicle extraction and velocity estimation to support traffic flow analysis. The objective of this dissertation is to provide an assessment on what state-of-the- art remote sensing technologies can offer in both areas: first, to further improve the accuracy and reliability of topographic, in particular, roadway corridor mapping systems, and second, to assess the feasibility of extracting primary data to support traffic flow computation. The discussion is concerned with airborne LiDAR (Light Detection And Ranging) and digital camera systems, supported by direct georeferencing. -

U.S. Army Awards $6.7 Billion Joint Light Tactical Vehicle Contract to Oshkosh Corporation
NEWS RELEASE U.S. Army Awards $6.7 Billion Joint Light Tactical Vehicle Contract to Oshkosh Corporation 8/25/2015 Oshkosh’s JLTV is the Next Generation Light Vehicle Designed to Move and Protect Our Troops in Future Missions OSHKOSH, Wis.--(BUSINESS WIRE)-- The U.S. Army Tank-automotive and Armaments Command (TACOM) Life Cycle Management Command (LCMC) has awarded Oshkosh Defense, LLC, an Oshkosh Corporation (NYSE: OSK) company, a $6.7 billion firm fixed price production contract to manufacture the Joint Light Tactical Vehicle (JLTV). The JLTV program fills a critical capability gap for the U.S. Army and Marine Corps by replacing a large portion of the legacy HMMWV fleet with a light tactical vehicle with far superior protection and off-road mobility. During the contract, which includes both Low Rate Initial Production (LRIP) and Full Rate Production (FRP), Oshkosh expects to deliver approximately 17,000 vehicles and sustainment services. “Following a rigorous, disciplined JLTV competition, the U.S. Army and Marine Corps are giving our nation’s Warfighters the world’s most capable light vehicle – the Oshkosh JLTV,” said Charles L. Szews, Oshkosh Corporation chief executive officer. “Oshkosh is honored to be selected for the JLTV production contract, which builds upon our 90-year history of producing tactical wheeled vehicles for U.S. military operations at home and abroad. We are fully prepared to build a fleet of exceptional JLTVs to serve our troops in future missions.” The JLTV program provides protected, sustained and networked light tactical mobility for American troops across the full spectrum of military operations and missions anywhere in the world. -

The Study on Innovation, Development and Implementation
ISSN (Online) 2581-9429 IJAR SCT ISSN (Print) 2581-XXXX International Journal of Advanced Research in Science, Communication and Technology (IJARSCT) Volume 11, Issue 1, November 2020 Impact Factor: 4.819 The Study on Innovation, Development and Implementation of the Self-driving Car Aniruddha Chaki Student, Department of Electrical Engineering Siliguri Institute of Technology, Siliguri, India Abstract: The development of the self-driving car is one of the greatest inventions of the century. With the technological advancement, the implementation of the autonomous vehicle has become the major attention among the researchers. This paper discusses the brief history of self-driving cars, its research and development, key technologies behind the self-driving, main aspects of implementing self-driving cars. The paper also describes some challenges with possible solutions to the fully autonomous vehicle in mass implementation. Keywords: Advanced Driver Assistance System (ADAS), autonomous, navigation, positioning, self- driving technology, radar, lidar, path planning, obstacle avoidance, Full Self driving (FSD), accidents, protests, advantages, challenges. I. INTRODUCTION In this 21st-century progress in technology has made man as omnipotent, omniscient and omnipresent as a god. It is being tried to find out and accomplish any work with higher efficiency, lesser cost, and least possible effort. This makes researchers explore the domain of Automation, Machine learning, and Artificial Intelligence to handle the hardest of the jobs which were once tedious and cumbersome for humans [1]. We are driving towards the future where humans will only be involved in high mental ability skills and all the other works will be automated [2]. In this paper, the previous researches in the field of self-driving have been studied. -

Morgan Stanley NDR
AMBARELLA.COM AMBARELLA.COM December 6th & 9th, 2019 COPYRIGHT COPYRIGHT AMBARELLA 2019 Morgan Stanley NDR Frankfurt, Germany and Milan, Italy Dr. Alberto Broggi, GM Ambarella Italy Casey Eichler, CFO Louis Gerhardy, Corporate Development 1 Forward-Looking Statements This presentation contains forward-looking statements that are subject to many risks and uncertainties. All statements made in this presentation other than statements of historical facts are forward-looking statements, including, without limitation, statements regarding Ambarella’s strategy, future operations, financial targets, future revenues, projected costs, prospects, plans and objectives for future operations, future product introductions, future rate of our revenue growth, the size of markets addressed by the company's solutions and the growth rate of those markets, technology trends, our ability to address market and customer demands and to timely develop new or enhanced solutions to meet those demands, our ability to achieve design wins, and our ability to retain and expand our customer and partner relationships. In some cases, you can identify forward-looking statements by terms such as "may," "will," "should," "could," "would," "expects," "plans," "anticipates," "believes," "estimates," "projects," "predicts," "potential," or the negative of those terms, and similar expressions and comparable terminology intended to identify forward-looking statements. We have based forward-looking statements largely on our estimates of our financial results and our current expectations -

On the Move FISCAL 2014 SUSTAINABILITY REPORT Welcome to Oshkosh Corporation’S Second Annual Corporate Sustainability Report
On The Move FISCAL 2014 SUSTAINABILITY REPORT Welcome to Oshkosh Corporation’s Second Annual Corporate Sustainability Report About This Report Oshkosh Corporation is a publicly traded company on the New York Stock Exchange (NYSE: OSK) and incorporated in the State of Wisconsin. Oshkosh Corporation’s financial reporting follows U. S. Securities and Exchange Commission (SEC) regulations, and our Annual Report on Form 10-K is available on our corporate website at www.oshkoshcorp.com under Investors. All entities which are included in our consolidated SEC financial statements are covered in this report. This sustainability report covers programs and performance for the Oshkosh Corporation fiscal year 2014, which ended on September 30, 2014. In some cases, data is reported on a calendar year basis, to be consistent with U.S. government reporting requirements. In preparing this report, Oshkosh followed the Global Reporting Initiative’s (GRI) G4 Guidelines and general reporting guidance on report content and quality. Please see our detailed GRI Index on pages 30-32 in this report to locate specific GRI indicator information. Our sustainability website, www.sustainability.oshkoshcorp.com, has expanded information on the topics addressed in this report. All data presented in this report has been calculated according to industry standard methodology and is explained in chart footnotes where appropriate. There have not been any restatements of the information provided in last year’s inaugural report, nor have there been any significant changes in the scope and aspect boundaries of the report. There have not been any significant changes in the reporting period regarding the organization’s size, structure, ownership or supply chain.