Accuracy Aspects of Non-Metric Imageries*
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Photo History Newsletters • Vol
THE AMALGAMATED PHOTO HISTORY NEWSLETTERS • VOL. 2-2 2021 We hope that the Covid pandemic soon passes away so we can get back to normal with regular meetings and events. In the interim here are addi- tional newsletters to keeping you read- ing. Please enjoy. Ken Metcalf of the Graflex Journal has another interesting issue which should entertain you well. Another fine newsletter comes from The Western Canada Photographic Historical Association in British Colum- bia with some fine reading content. Permissions granted: Graflex Journal– Ken Melcalf The Western Canada Photographic Historical Association– Tom Parkinsion SHARING INFORMATION ABOUT GRAFLEX AND THEIR CAMERAS ISSUE 3 2020 FEATURES some leather that was a good match. Thickness was right, color was good, and the pebble grain was close National Graflex Gets a New Coat by Paul S. Lewis……..….....….....….1 enough. So, I had them send me a large sheet; 12x17. Camera Group - Roger Beck………….…….………...….…..…………....2 Having a good supply would allow for some mistakes Viewing Wild Animals at Night by William V. Ward …….…...…………..4 and assure me that there would be enough length and Hold It! Part 1 by Ken Metcalf.……………….…………….…………….....5 width to cover the missing panels with one complete Graflex Patents by Joel Havens….…..………………...…………….…...12 piece. The source I used was Cameraleather ([email protected]). I did just check with them to be sure similar material is available. The report is that although the material is available, supply is limited. So, with material and camera in hand, the next step Ed: Mr. Lewis is a Graflex Journal subscriber and author was to get the new cover panels cut out and attached. -

Graflex Historic Quarterly the Quarterly Is Dedicated to Enriching the Study of the Graflex Company, Its History, and Products
G RAFLEX Since 1996 HISTORIC QUARTERLY VOLUME 19 ISSUE 1 FIRST QUARTER 2014 FEATURES Arthur L. Princehorn Arthur L. Princehorn and His Camera by Ken Metcalf with Linda Grimm……………………………………………………...……...1 Linda Grimm writes that in the fall of 1894, Arthur L. Prince- Two Graflex Home Portrait Bodies Made for Big Bertha Use by Doug horn set out from Ohio for New Rochelle, New York, with Frank……………………………………………………………....6 his bride, Agnes, to begin a new career as a photographer and Reviews: Mizu-san, SHORPY and PhotoHistory XVI....………..….….7 naturalist at John H. Starin’s Glen Island Resort. There he Chicken or the Egg...or Evolved Chicken?.....…………………………………………..8 joined his former Oberlin College colleague, Lewis M. McCormick, in a program to develop a natural history mu- seum at the famous family day resort on Long Island Sound. The skills they brought were honed in the college museum and included mounting specimens (taxidermy), maintaining displays, and organizing materials for laboratory classes. In addition, they both had years of experience as amateur field naturalists and shared an avid interest in photography. This was a rare opportunity for two very talented young men, and by all indications they made a great success of it over the ten- year period they worked at Glen Island. The museum grew year-by-year as Lewis gathered material on trips to distant locales in Europe, Africa, the Middle East, Asia, and the Pa- cific. They continued to prepare specimens from the local area and develop exhibits to excite the public’s interest in natural history. Mr. Princehorn increasingly used photogra- phy in his work, seeking images of animals in both natural and captive settings. -
Basic View Camera
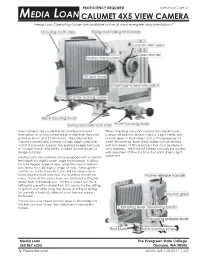
PROFICIENCY REQUIRED Operating Guide for MEDIA LOAN CALUMET 4X5 VIEW CAMERA Media Loan Operating Guides are available online at www.evergreen.edu/medialoan/ View cameras are usually tripod mounted and lend When checking out a 4x5 camera from Media Loan, themselves to a more contemplative style than the more patrons will need to obtain a tripod, a light meter, one portable 35mm and 2 1/4 formats. The Calumet 4x5 or both types of film holders, and a changing bag for Standard model view camera is a lightweight, portable sheet film loading. Each sheet holder can be loaded tool that produces superior, fine grained images because with two sheets of film, a process that must be done in of its large format and ability to adjust for a minimum of total darkness. The Polaroid holders can only be loaded image distortion. with one sheet of film at a time, but each sheet is light Media Loan's 4x5 cameras come equipped with a 150mm protected. lens which is a slightly wider angle than normal. It allows for a 44 degree angle of view, while the normal 165mm lens allows for a 40 degree angle of view. Although the controls on each of Media Loan's 4x5 lens may vary in terms of placement and style, the functions remain the same. Some of the lenses have an additional setting for strobe flash or flashbulb use. On these lenses, use the X setting for use with a strobe flash (It’s crucial for the setting to remain on X while using the studio) and the M setting for use with a flashbulb (Media Loan does not support flashbulbs). -

GRAFLEX F'~- '3F/Uueu«J ~ with the NEW Ektalite Field Lens GRAFLEX CAMERAS OFFER YOU ALL THESE ADVANTAGES
GRAFLEX f'~- '3f/UueU«J ~ with the NEW Ektalite Field Lens GRAFLEX CAMERAS OFFER YOU ALL THESE ADVANTAGES: • A Sing le Lens System Free From Parallax • Full Vision Ground Glass Focusing • W ide Range, High Speed Focal Plane Shutter • Interchangeability of Lenses • Revolving Back • Interchangeable Film Attachments PLUS The Ektalite Field Lens-Newest aid for better pictures The GRAFLEX Single Lens Reflex at Work ... 1. As you look into the focusing hood you see on the ground glass, up to the instant of exposure, a brilliant, reflected image, right side-up and full picture size, revealing exactly the sharpness of focus and composition of the subject matter that will be recorded on the film. 2. When the pleasingly composed image is clear on the ground glass, the subject is in sharp focus. 3. The mirror reflects the image to the ground glass. When the exposure release is pressed, the mirror swings upward out of the way, instantly releasing the focal plane shutter-securing the desired picture. 4. Focusing is under convenient, positive control to the very instant of exposure. 5. Superior lens gathers ample light for the focal plane shutter, which transmits appreciably more light than does any other type of shutter. Since the lens through which you focused is the lens which makes the picture, it entirely elim inates any problem of parallax. 2U. x 3U. REVOLVING BACK GRAFLEX CAMERA ~S(J~l'ake 9M S(J 9~ '[)~I OMPLETE with standard Graflex fea a complete range of speeds from 1/10 to C tures this camera is a favorite among 1/1000. -

Big Bertha/Baby Bertha
Big Bertha /Baby Bertha by Daniel W. Fromm Contents 1 Big Bertha As She Was Spoke 1 2 Dreaming of a Baby Bertha 5 3 Baby Bertha conceived 8 4 Baby Bertha’s gestation 8 5 Baby cuts her teeth - solve one problem, find another – and final catastrophe 17 6 Building Baby Bertha around a 2x3 Cambo SC reconsidered 23 7 Mistakes/good decisions 23 8 What was rescued from the wreckage: 24 1 Big Bertha As She Was Spoke American sports photographers used to shoot sporting events, e.g., baseball games, with specially made fixed lens Single Lens Reflex (SLR) cameras. These were made by fitting a Graflex SLR with a long lens - 20" to 60" - and a suitable focusing mechanism. They shot 4x5 or 5x7, were quite heavy. One such camera made by Graflex is figured in the first edition of Graphic Graflex Photography. Another, used by the Fort Worth, Texas, Star-Telegram, can be seen at http://www.lurvely.com/photo/6176270759/FWST_Big_Bertha_Graflex/ and http://www.flickr.com/photos/21211119@N03/6176270759 Long lens SLRs that incorporate a Graflex are often called "Big Berthas" but the name isn’t applied consistently. For example, there’s a 4x5 Bertha in the George Eastman House collection (http://geh.org/fm/mees/htmlsrc/mG736700011_ful.html) identified as a "Little Bertha." "Big Bertha" has also been applied to regular production Graflexes, e.g., a 5x7 Press Graflex (http://www.mcmahanphoto.com/lc380.html ) and a 4x5 Graflex that I can’t identify (http://www.avlispub.com/garage/apollo_1_launch.htm). These cameras lack the usual Bertha attributes of long lens, usually but not always a telephoto, and rapid focusing. -

Graflex Historic Quarterly the Quarterly Is Dedicated to Enriching the Study of the Graflex Company, Its History, and Products
G RAFLEX Since 1996 HISTORIC QUARTERLY VOLUME 18 ISSUE 1 FIRST QUARTER 2013 FEATURES In 1950 the “45” and “34” Pacemaker Speed and Crown Graph- ics were sold with Graflok backs. An accessory 4x5 or 3¼ x 4¼ The Graflex Graflok Back 1949-1973 by Bill Inman, Sr.………………….1 Graflok back for the Anniversary Speed Graphic also became The Evolution of a Graflex Collection by Ronn Tuttle...……...…………...3 available. All the backs could be supplied with or without a metal four-sided removable viewing hood. The 4x5 dividing The Graflex Electroswitch by Ken Metcalf………………….………..........4 back was also supplied with a Graflok back frame, less the fo- Triple Lens Graphic……………………………………………..………….5 cusing panel. When the dividing back is fitted to a 4x5 Graphic or Graphic View camera with a Graflok back, the focusing The Story of the Century by Jim Chasse..……………….………..…...…...6 panel is transferred from the camera to the dividing back for focusing and viewing the image. THE GRAFLEX GRAFLOK BACK 1949-1973 Copyright 2013 William E. Inman, Sr. Graflok back on “45” Pacemaker Speed Graphic. T he Century Graphic 23, with the Graflok back, was born in The Graflex service department could, on special order, convert 1949 in answer to the demand for a lower-priced press-type the 4x5 Super D Graflex camera to a Graflok back, instead of camera for amateurs, and a second camera for professionals the original Graflex back. who preferred a smaller negative size for 120 color roll film. Competition at that time included the Rolleiflex and the Rollei- The conversion of a cord. -

THE GRAPHIC 35 ELECTRIC by Michael Parker
SHARING INFORMATION ABOUT GRAFLEX AND THEIR CAMERAS ISSUE 3, 2017 FEATURES The Graphic 35 Electric by Michael Parker……………………………………………………...1 The Press Graflex by Jim Chasse……………………………….……………………………….5 Book Review, Images of America, Oak Ridge…………………………………………………..9 Graflex Identification Cameras by Ken Metcalf………………………………………………...10 Graflex Ads by George Dunbar………………….……………………………….…..…..…...…11 John Adams Letter to Tim Holden, June 1, 1983…………………………………...………….12 THE GRAPHIC 35 ELECTRIC By Michael Parker The Graphic 35 Electric was a game changer. It was the first 35mm camera with electric film advance; it used a leaf shutter synchronised for electronic flash at all speeds up to 1/500 sec; the lens was inter- changeable by bayonet with a variety of quality German lenses from 35mm to 135mm, and to top it all the camera viewfinder with parallax correction, showed the wide base rangefinder-coupled to all lenses, bright line frames for different focal lengths and the pointer for the built -in exposure meter. Figure 1 In 1959 no other camera could beat it on specifications. The Voigtlander Prominent II came close but had manual lever film wind and no expo- sure meter. The best available Leica models (IIIg and M3) had manual lever wind, no exposure meter and a focal plane shutter that would syn- chronise with electronic flash at only 1/50 sec and below. Figure 1: The Graflex Graphic 35 Electric with Iloca- The Graphic 35 Electric is an Iloca Quinon 50mm f/1.9 lens. Electric in all but name and was made in Hamburg, Germany, by Iloca Kamera-Werk owned by Wilhelm Witt. Figure 2 The differences are the engraved name ‘Graphic 35 Electric’ on the top plate, the name repeated next to the rangefinder window, a small round Graflex logo on the camera front below the viewfinder window and the addition of strap lugs. -
Graflex and Graphic Cameras; 1914
F X AIND I 1914 FOLMER & SCHWING DIVISION EASTMAN KODAK COMPANY ROCHESTER, N. Y. THE CIIIAifrLEX OU who photograph for pleasure or profit, have not fully realized the joys of photography until you have used a Gra.flex. The business-like ~ertainty of operation, the accuracy of construction, and the finished beauty of the instru ment, combine to make the Graflex pre eminently the quality Camera. The purchase of a Graflex brings with it the pride of possession, the satis faction of knowing you have the best, and-what is more important- the ability to do work im possible with cameras of the usual type. Before the intro duction of the Graflex, extremely short exposures were possible only under the most favorable light conditions, and it was impossible to make satisfactory photographs of mov ing objects on dark or cloudy days. Without the elaborate preparation of focusing on the ground glass under the awkward focusing cloth, or accurately measuring the dis tance between the camera and subject, the photographer had no assurance that his picture was accurately focused. Very often the pictures most desired are the ones that cameras of the usual type are unable to secure-snapshots of children playing indoors, pictures of moving objects taken in the soft light of a cloudy day; or, when the light is bright,- sharp, clear pictures of objects moving with the utmost rapidity. It is photography of this kind that has made the Graflex the first choice of photographers who wish a camera with the widest possible range of utility. The Graflex, employing well known optical principles in a new way, completely eliminates uncertainty of focus and makes it possible to obtain fully timed negatives in doors, in the shade, or on cloudy days, with exposures of 3 very short duration, while under favorable light conditions exposures as brief as one one-thousandth, or even one fifteen-hundredth, of a second may be made with full assurance of a fully timed negative. -

Camera Clinics Held at Crealdé Main Campus: Withdrawal Deadline Is One Week Prior to the Start Date of Each Camera Clinic
Camera Each workshop will be specifically geared towards the functions and practical applications of specific vintage cameras, which all have recently exploded in popularity and value as part of the Clinics re-emergence of film-based or analog photography. Sessions will include an overview of camera Crealdé half-day clinics for owners & enthusiasts controls, special lenses and accessories. of popular vintage film cameras Each instructor has used the particular camera type Co-sponsored by Kiwi Camera Service in their professional work and will share personal and historic images with students. The workshop will culminate with a short field session, applying the specific characteristics of the camera. Camera Clinics held at Crealdé Main Campus: Withdrawal deadline is one week prior to the start date of each camera clinic. Hasselblad Camera Clinic with Chris Casler Saturday, June 22, 2019 | 2pm–6pm Members: $75 | Non: $95 The standard for professional film cameras prior to digital age and – the camera that went to the moon. Twin Lens Reflex (TLR) Camera Clinic with Peter Schreyer Saturday, August 17, 2019 | 2pm–6pm Members: $75 | Non: $95 The most popular camera for documentary, journalistic and street-photography in the 1940s to the 1960s. 4x5 Press Camera Clinic with Jon P. Manchester Saturday, November 23, 2019 | 2pm–6pm Members: $75 | Non: $95 The Graflex press camera is the smallest and most portable camera that carries a 4x5 negative and was the most common camera used by photo-journalists and documentary photographers in the 1920s to the 1950s. To register or for more information visit crealde.org or call 407-671-1886 Crealdé School of Art is a nonprofit community arts organization located in Winter Park, Florida.. -

SUPER SPEED and SUPER GRAPH IC® CAMERAS SUPER GRAPHIC and SUPER SPEED GRAPHIC MANUAL
SUPER SPEED and SUPER GRAPH IC® CAMERAS SUPER GRAPHIC AND SUPER SPEED GRAPHIC MANUAL The Super Graphic a nd Super Speed Graphic, today's most modern 4 x 5 cameras, boast many new features in a ddition to those now found in Grafiex made press cameras. The following pages will review basic operation, but even more important, they will explain as fully as possible the purpose and use of the new features. To "get the most for your money," be sure you study the instructions thor oughly. A fine camera, like any piece of precision equipment, cannot be operated at its best unless its advantages are understood. A bibliography appears on page 30 for those wishing to make a more thorough study of lighting, exposure, and other areas of photographic information. Note: All instructions apply to both the Super Speed and the Super Graphic Cameras. GRAPHIC, PACEMAKER, GRAFLITE, STROBOFLASH are registered trademarks of GRAFLEX, INC. 2 IN 0 EX BACKS FOCUSING Focusing Back ........ 14 Ground Glass. 13 Revolving Back. 15 Rangefinder .... .. 10-11 Scale. 12 BATTERIES, Changing. .24-25 BELLOWS-Extension ......... 16 FRONT STANDARD ADJUSTMENTS BIBLIOGRAPHY .. 30 Drop Bed. 22 CAMERA-Opening. 6 Rise ..... 18 -Closing ........ .... 7 Side Shift. 19 Swing .. 20 CARE of the Camera. 29 Tilt. 21 ELECTRIC SHUTTER TRIPPING . 24 ILLUSTRATIONS-MAIN. 4-5 FACTORY SERVICE ... 31 INFINITY STOPS .. 9 Location-Back Cover LENSES FLASH Interchanging. 8 Bulbs. 27 Lens Fitting Service ... 9 Flash Exposure Scale. 12 PRESSLOK TRIPOD MOUNT . 23 Grafiite .. .26-27 Strobofiash .. 28 -

Tethered Balloon for Archaeological Photos
jULI.-\N HILL 'v\!HITTLESEY* 1700 Broadway _Yew York, N. Y., 10019 \ Tethered Balloon for Archaeological Photos Various cameras were suspended over sites in Greece and Turkey for photo grammetric compilation. (Abstract 01/. next page) FIr.. 1. Filling a lelherecl balloon to carry all aerial c;unera. over a 7th Century H.C. I.ydian site being' UMEROUS ARCHAEOLOGICAL studies were excavated by the archaeologists from the N completed over the past three years Harvard-Cornell expedition in Turkey. The using halloon photography for various expedi balloon and camera on its platform lI'ere then tions in Turkey, Greece, I taly and Cyprus. walked to another nearby site (Figure 4), the Three years ago, in Sardis, Turkey, at the site of King Croesus capital in ancient I.ydia, we filled our 600-cubic-foot balloon with hydrogen under 200 atmospheres pressure from divers' back tanks (Figure I). The balloon was made by Ballonfabrik of Augs burg, Germany, and cost approximately $350. The three-meter sphere, made of impregnated cotton, coated with aluminum and free of static, weighed approximately 15 pounds. Vile hung the camera, a Linhof 6 X9 centimeter format with Schneider Kreutsnach wide-angle lens, in a gimbal prepara tory to lift (Figure 2). 1t had a pneumatic release from a hand bulb on the ground. The camera was 150 feet abo\'e the ground and the balloon 30 feet above the camera. True vertical photos (Figure 3) \\'ere taken • Presented at the symposium, Earth Observa tions from Balloons, sponsored by the American Society of Photogrammetry in Washington, D. -

The First 2¼ X 3¼ Speed Graphic and Its Lenses by Jim Chasse…...……1 Different Choices, Just for the Miniature Speed Graphic
SHARING INFORMATION ABOUT GRAFLEX AND THEIR CAMERAS ISSUE 2, 2017 shutter combinations would be needed for all the cameras FEATURES being made. The August 1939 Graflex catalog listed 10 The First 2¼ x 3¼ Speed Graphic and Its Lenses by Jim Chasse…...……1 different choices, just for the Miniature Speed Graphic. Graflex Strobomatic by John Fleming……...…………………….…...….…...4 Over the lifespan of the camera, over 30 lens/shutter op- Graflex Identification Cameras by Ken Metcalf…………………...………….6 tions were available. Graflex Ads by George Dunbar…………………………………..……...…...11 5x7 Bare-wood Graflex by Doug Frank....………………………...………...12 THE FIRST 2¼ x 3¼ SPEED GRAPHIC AND ITS LENSES By Jim Chasse In January 1947, Graflex introduced the Pacemaker se- ries, but that's a story for another day. This article will cover just the original miniature and some of the many, many lenses available, as almost all were fitted to the Miniature at the Graflex factory. The 2¼ x 3¼ Miniature Speed Graphic will now be referred to as the “2x3 mini.” I just recently located a very unusual lens and shutter combina- tion mounted on a Graflex 2x3 mini lens- In October 1938, in the middle of a world-wide depres- board. It is an f/3.7 sion, Folmer Graflex introduced the 2¼ x 3¼ Miniature 107mm Kodak Anas- Speed Graphic, above. Over 47,000 were manufactured tigmat Ektar number by December 1946. 22,000 were made between May 1313, with no letter 1938 and November 1941. 2,000 more were made be- date code, mounted in tween January 1942 to late 1944. From July 1945 a No.