Phycore®-Am57x Hardware Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SFF.2009.RG.Pdf
Only Print Single Only Print Single www.smallformfactors.com www.pc104online.com Volume 13 • Number 1 COLUMNS FEATURES 8 PC/104 Consortium THE BIG YET SMALL PICTURE: Embedded marketplace embraces PCI/104-Express By Dr. Paul Haris Small, smaller, smallest 12 The wireless toolbox 9 Small Form Factor SIG By John Schwartz, Digi International Separating interconnects from form factors By Paul Rosenfeld 15 Focus on Form Factors: Pico-ITXe 10 Euro Small Tech By Bob Burckle, WinSystems Compact board powers personal weather station By Hermann Strass TECH SMALL TALK: Insights from the experts 74 Editor’s Insight 16 COMIT hits the embedded computing world Rugged SFFs nail system designs By Bob Burckle, WinSystems By Chris A. Ciufo Only IT’S A SMALL (FORM FACTOR) WORLD: Unique applications DEPARTMENTS 19 PC/104 powers nanosatellite for space situational 24 Editor’s Choice Products awareness By Kristin Allen, Kristin Allen Marketing & Design By Don Dingee Print 22 Prototyping SoCs with customized PCI Express WEB RESOURCES development boards By Stephane Hauradou, PLDA Subscribe to the magazine or E-letter Live industry news • Submit new products RESOURCE GUIDE: http://submit.opensystemsmedia.com White papers: 27 2009 PC/104 and Small Form Factors Resource Guide Read: http://whitepapers.opensystemsmedia.com Submit: http://submit.opensystemsmedia.comSingle Communications and networking ...........27 Complete systems .....................29 ON THE COVER: In a progression from small to smallest, the ADLINK Technology Industrial automation ...................30 MilSystem 800, WinSystems Pico-I/O with VIA Pico-ITXe, and Digi XBee radio module show the latest trends in small form factor Interfaces ..........................32 systems and boards. -

M-501 Datasheet.Pdf
Linux-ready Arm9 System on Module M-501 Features • ATMEL 180MHz AT91RM9200 CPU w/ MMU • Linux kernel 2.6.14 with file system • 64MB SDRAM and 16MB NOR Flash • 1 x 10/100Mbps Ethernet • 2 x USB 2.0 hosts supporting full speed of 12Mbps • 1 x SD (secure digital) interface • 4 x 921.6Kbps UARTs w/ hardware flow control • External bus (A0~A7, D0~D7, RD, WR), with 4 x chip select • Ultra-low power consumption, less than 2.5 Watts • GNU C / C++ toolchain is included H/W Specifications CPU / Memory GPIO (General-purpose I/Os) • CPU: ATMEL 180MHz AT91RM9200 w/ MMU • 32 x GPIOs can be programmed as digital input or output • Memory: 64MB SDRAM, 16MB NOR Flash • Supports interrupt function when GPIOs are set as digital input Network Interface • Signal Level: CMOS / 3.3V compatible • Type: 1 x 10/100Mbps Ethernet Pre-defined Pins • PHY: DAVICOM DM9161 • Reset Button (CN2, pin#35), input • Protection: 1.5KV magnetic isolation • Buzzer (CN2, pin#37), output UART Interface • 2-pin DIP SW (CN2, pin#12, #13), input • Port 0: TXD0, RXD0, RTS0, CTS0, GND • System ready LED (CN2, pin#38), output • Port 1: TXD1, RXD1, RTS1, CTS1, DCD1, DTR1, DSR1, GND • LAN activity LED (CN3, pin#11), output • Port 2: TXD2, RXD2, RTS2, CTS2, GND Undefined Digital I/O Pins (Reserved) • Port 3: TXD3, RXD3, RTS3, CTS3, GND • CN1: pin#23, #24, #25, #26 • Signal Level: CMOS / 3.3V compatible • CN3: pin#23, #24 Common UART Parameters Debug Ports • Baud Rate: Up to 921.6Kbps • Console Port: Tx / Rx serial console (share RTS2, CTS2) • Parity: None, Even, Odd, Mark, Space • Data Bits: -

Zoom™ OMAP-L138 EVM Development Kit
PRODUCT BRIEF: Logic :: Texas Instruments www.logicpd.com/ti Zoom™ OMAP-L138 EVM Development Kit Logic’s product-ready software and hardware platforms fast ZOOM OMAP-L138 EVM :: HIGHLIGHTS: forward your product development while reducing risk and + OMAP-L138 SOM-M1 controlling costs. The Zoom OMAP-L138 EVM Development + TMS320C6748 SOM-M1 Kit is a high-performance application development kit for + Application baseboard + User Interface board evaluating the functionality of Texas Instruments’ energy- + Open source Linux™ BSP efficient OMAP-L138 applications processor, TMS320C6748 + Necessary accessories to immediately Digital Signal Processor (DSP), and Logic’s System on Module get up and running (SOM). OMAP-L138 SOM-M1 :: BENEFITS: Application development is performed right on the product-ready + Product-ready System on Module with a TI OMAP-L138 processor or TMS320C6748 OMAP-L138 SOM-M1 and software Board Support Packages DSP running at 300 MHz (BSPs) included in the kit, which enables you to seamlessly transfer + Compact form factor—SOM-M1 your application code and hardware into production. The included (30.0 x 40.0 x 4.5 mm) SOMs provide easy evaluation of the OMAP-L138 processor and + Long product lifecycle + 0˚C to 70˚C (commercial temp) TMS320C6748 DSP. + RoHS compliant ZOOM OMAP-L138 EVM DEVELOPMENT KIT The OMAP-L138 SOM-M1 is ideal for applications that require high-speed data transfer and high-capacity storage, such as test and measurement, public safety radios, audio applications, The Zoom OMAP-L138 EVM Development Kit and intelligent occupancy sensors. The OMAP-L138 and includes two SOMs (OMAP-L138 SOM-M1 TMS320C6748 offer a universal parallel port (uPP) and are the and TMS320C6748 SOM-M1), application first TI devices with an integrated Serial Advanced Technology baseboard, user interface (UI) board, accessories, Attachment (SATA) interface. -

Vybrid VF6 SOM (System-On-Module) Hardware Architecture
Vybrid VF6 SOM (System-On-Module) Hardware Architecture Document No: VF6-SOM-HA Version: 2.6 Date: September 30, 2015 Emcraft Systems Table of Contents 1. INTRODUCTION ................................................................................................................................. 3 2. HARDWARE PLATFORM .................................................................................................................. 3 2.1. HARDWARE PLATFORM OVERVIEW ...................................................................................................... 3 2.2. FUNCTIONAL BLOCK DIAGRAM ............................................................................................................ 4 2.3. MICROCONTROLLER ........................................................................................................................... 4 2.3.1. Microcontroller Device.............................................................................................................................. 4 2.3.2. Microcontroller Configuration ................................................................................................................... 4 2.3.3. Microcontroller Boot Selection ................................................................................................................. 5 2.4. JTAG INTERFACE .............................................................................................................................. 5 2.5. POWER ........................................................................................................................................... -

Mitysom-5Csx System on Module 25 April 2019 1
Critical Link, LLC MitySOM www.CriticalLink.com MitySOM-5CSx System on Module 25 April 2019 FEATURES Intel Cyclone V - U672 SoC - Up To Dual ARM Cortex- A9 MPU - 925MHz Max clock speed - Dual NEON SIMD Coprocessors - 32 KB L1 Program Cache (per core) - 32 KB L1 Data Cache (per core) - 512 KB L2 Cache (shared) - 64 KB on-chip RAM - ECC Support Mechanical - Up To 133 User FPGA I/O Pins - 314-Pin Card Edge Connector - 44 CPU I/O Pins - Small 82mm (3.2”) x 39mm (1.5”) size - 6 High speed transceivers (SX only) Hard Processor System (HPS) Cyclone V Processor Choices - Selection of boot sources - Cyclone V SX (3.125 Gbps transceivers) - Up to 2 10/100/1000 Mbps Ethernet - Cyclone V SE MACs - Up to 2 USB 2.0 OTG Ports Memory - Up to 2 CAN Interfaces - Up To 2GB DDR3 CPU RAM - Up to 2 UARTs x32 bits + ECC - 1 MMC/SD/SDIO - Up To 512MB DDR3 FPGA RAM - Up to 4 I2C controllers x8 bits (optional) - Up to 2 master/2 slave SPI - Up To 272MB QPSI NOR FLASH - 3 HPS PLLs Integrated Power Management APPLICATIONS JTAG connector on-module Machine Vision Test and Measurement FPGA Fabric Embedded Instrumentation - Up To 110K Logic Elements (LE) Industrial Automation and Control - 460Mhz Global Clock Industrial Instrumentation - Up To 5.1Mb M10K Memory Medical Instrumentation - Up To 621Kb MLAB Memory Closed Loop Motor Control - Up To 112 DSP Blocks - Up To 6 FPGA PLLs BENEFITS - Fractional PLL Outputs on each PLL Rapid Development / Deployment Multiple Connectivity and I/O Options Low Power Serial Transceivers (SX only) Rich User Interfaces - 3.125Gbps Transceivers - PCIe Hard IP Block High System Integration (Gen1.1 x1 or x4) High Level OS Support - Embedded Linux - Micrium uC/OS (via 3rd Party) Power, Reset and Clock Management rd - Android (via 3 Party) - QNX (via 3rd Party) DESCRIPTION The MitySOM-5CSx series of highly configurable, small form-factor System-on-Modules (SoM) feature an Intel Cyclone V System-on-Chip (SoC). -

System on Module and Carrier Board Hardware Manual
phyCORE-LPC3250 System on Module and Carrier Board Hardware Manual Document No: L-714e_1 Product No: PCM-040 SOM PCB No: 1304.1 CB PCB No: 1305.2, 1305.3 Edition: January 27, 2009 A product of a PHYTEC Technology Holding Company Table of Contents L-714e_1 Table of Contents List of Tables . .iii List of Figures . v Conventions, Abbreviations and Acronyms. .vi Preface . .viii Part I: PCM-040/phyCORE-LPC3250 System on Module . 1 1 Introduction . 2 1.1 Block Diagram . 4 1.2 View of the phyCORE-LPC3250 . 5 2 Pin Description . 7 3 Jumpers . 19 4 Power . 24 4.1 Primary System Power (VCC) . 24 4.2 Secondary Battery Power (VBAT) . 24 4.3 Analog-to-Digital Converter Power (VCC_AD_EXT) . 24 4.4 SDIO Controller Power (VCC_SDIO) . 25 4.5 On-board Voltage Regulators . 25 4.5.1 Primary 1.2V and 1.8V Supplies (U23) . 26 4.5.2 Adjustable Core Voltage Supply (U27) . 27 4.5.3 SDRAM and RTC Supplies (U22) . 27 4.5.4 Selecting Shunt Resistors for Current Measurements. 27 4.6 Voltage Supervisor (U16, U17) . 28 5 Deep Sleep . 30 6 External RTC (U26). 32 7 External Watchdog . 33 8 System Configuration and Booting . 34 8.1 Boot Process and Boot Modes . 34 8.1 Stage 1 Loader . 37 9 System Memory . 39 9.1 SDRAM (U10, U11) . 39 9.2 NAND Flash (U8). 39 9.3 NOR Flash (U12, U13) . 40 9.4 NOR vs. NAND . 40 9.5 EEPROM (U9) . 40 9.6 Memory Map . 42 10 Serial Interfaces . -
User Guide Version 1.0
M-502 Linux ARM9 System on Module User Guide Version 1.0 Copyright © Artila Electronics Co., Ltd. All Rights Reserved. Table of Contents 1. Introduction ................................................................................................................ 1 2. Layout ......................................................................................................................... 2 3. Hardware Specifications ............................................................................................ 3 4. Software Specifications ............................................................................................. 6 4.1 General ............................................................................................................................... 6 4.2 Protocol Stacks ................................................................................................................... 6 4.3 Utilities ................................................................................................................................. 6 4.4 Daemon ............................................................................................................................... 6 4.5 Toolchain for Windows / Linux ............................................................................................ 6 4.6 Standard Device Drivers ..................................................................................................... 6 4.7 Default Setting.................................................................................................................... -

Embedded Solutions
Our mission is to provide embedded computing and I/O solutions for demanding industrial applications while maximizing innovation, reliability and flexibility. Technology Partners Germany Embedded FPGA Technology and NIOS Soft MEN Mikro Elektronik GmbH Standard Product Overview 2006 Processor Cores from Altera (Headquarters) Corporation Neuwieder Straße 5-7 90411 Nürnberg Product Overview 2006 PowerPC Processors from Member of Freescale Semiconductor Phone: +49 (0) 911 99335-0 The international user group for Solutions mezzanine technologies Fax: +49 (0) 911 99335-901 [email protected] QNX Real-time Operating System PXI Systems Alliance www.men.de from QNX Open Standards Alliance 19“ Rack Technology France from Schroff Profibus User Group MEN Mikro Elektronik SA 18, rue René Cassin Profibus Protocol Stack from Softing ZA de la Châtelaine PC/104 Embedded Consortium 74240 Gaillard Embedded Linux from Phone: +33 (0) 450 955 312 Sysgo Real-Time Solutions Fax: +33 (0) 450 955 211 CAN in Automation [email protected] CANopen Protocol Stack www.men-france.fr from Vector Informatik PCI Industrial Computer Embedded Solutions Manufacturers Group VxWorks Real-time Operating System from WindRiver USA MEN Micro Inc. PO Box 4160 Lago Vista, TX 78645-4160 Phone: (512) 267-8883 Board-Level Fax: (512) 267-8803 [email protected] Computers for Ordering and Shipping Information www.menmicro.com ■ For product ordering numbers please refer to the corresponding data sheets on MEN's websites. ■ Hardware and software user manuals are ready for download from our websites. Industrial ■ Software packages are ready for download from our websites. ■ For technical support please refer to our websites or mail to [email protected] or call our support hotline in Germany under +49-911-99335-161 ■ Shipment is done ex works, excluding insurance, according to ZVEI (General Conditions of Applications Supply and Delivery for Products and Services of the Electrical Industry). -
System on Module and Carrier Board Hardware Manual Phycore-AM3517
phyCORE-AM3517 System on Module and Carrier Board Hardware Manual Document No: L-761e_2 Product No: PCM-048/PCM-961 SOM PCB No: 1335.1 CB PCB No: 1336.1 Edition: March 21, 2012 A product of a PHYTEC Technology Holding Company phyCORE-AM3517 L-761e_2 In this manual are descriptions for copyrighted products that are not explicitly indicated as such. The absence of the trademark (™) and copyright (©) symbols does not imply that a product is not protected. Additionally, registered patents and trademarks are similarly not expressly indicated in this manual. The information in this document has been carefully checked and is believed to be entirely reliable. However, PHYTEC America LLC assumes no responsibility for any inaccuracies. PHYTEC America LLC neither gives any guarantee nor accepts any liability whatsoever for consequential damages resulting from the use of this manual or its associated product. PHYTEC America LLC reserves the right to alter the information contained herein without prior notification and accepts no responsibility for any damages which might result. Additionally, PHYTEC America LLC offers no guarantee nor accepts any liability for damages arising from the improper usage or improper installation of the hardware or software. PHYTEC America LLC further reserves the right to alter the layout and/or design of the hardware without prior notification and accepts no liability for doing so. © Copyright 2011 PHYTEC America LLC, Bainbridge Island, WA. Rights - including those of translation, reprint, broadcast, photomechanical or similar reproduction and storage or processing in computer systems, in whole or in part - are reserved. No reproduction may occur without the express written consent from PHYTEC America LLC. -

Dev Board Datasheet Beta Version
Dev Board Datasheet Beta version Copyright 2019 Google LLC. All rights reserved. Features Edge TPU Module (SOM) Audio connections NXP i.MX 8M SOC (Quad-core Cortex-A53, plus 3.5mm audio jack (CTIA compliant) Cortex-M4F) Digital PDM microphone (x2) Google Edge TPU ML accelerator coprocessor 2.54mm 4-pin terminal for stereo speakers Cryptographic coprocessor Video connections Wi-Fi 2x2 MIMO (802.11b/g/n/ac 2.4/5GHz) HDMI 2.0a (full size) Bluetooth 4.1 39-pin FFC connector for MIPI-DSI display (4-lane) 8GB eMMC 24-pin FFC connector for MIPI-CSI2 camera (4-lane) 1GB LPDDR4 MicroSD card slot USB connections Gigabit Ethernet port USB Type-C power port (5V DC) 40-pin GPIO expansion header USB 3.0 Type-C OTG port Supports Debian Linux USB 3.0 Type-A host port USB 2.0 Micro-B serial console port Overview The Coral Dev Board is a single-board computer with a removable system-on-module (SOM) that contains eMMC, SOC, wireless radios, and the Edge TPU. You can use the Dev Board as a single-board computer when you need accelerated ML processing in a small form factor, but it also serves as an evaluation kit for the SOM. You can use the dev board to prototype internet-of-things (IOT) devices and other embedded systems that demand fast on-device ML inferencing, and then scale to production using just the 40 mm × 48 mm SOM board combined with your custom PCB hardware using board-to-board connectors. The SOM is based on NXP's iMX8M system-on-chip (SOC), but its unique power comes from the Edge TPU coprocessor. -
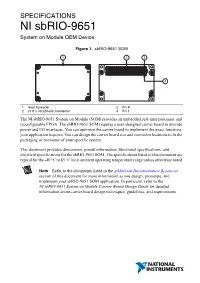
NI Sbrio-9651 System on Module OEM Device Specifications
SPECIFICATIONS NI sbRIO-9651 System on Module OEM Device Figure 1. sbRIO-9651 SOM 1 2 3 4 1 Heat Spreader 3Pin 8 2 J1 8 × 40 320-pin Connector 4Pin 1 The NI sbRIO-9651 System on Module (SOM) provides an embedded real-time processor and reconfigurable FPGA. The sbRIO-9651 SOM requires a user-designed carrier board to provide power and I/O interfaces. You can optimize the carrier board to implement the exact functions your application requires. You can design the carrier board size and connector locations to fit the packaging or enclosure of your specific system. This document provides dimensions, pinout information, functional specifications, and electrical specifications for the sbRIO-9651 SOM. The specifications listed in this document are typical for the -40 °C to 85 °C local ambient operating temperature range unless otherwise noted. Note Refer to the documents listed in the Additional Documentation Resources section of this document for more information as you design, prototype, and implement your sbRIO-9651 SOM application. In particular, refer to the NI sbRIO-9651 System on Module Carrier Board Design Guide for detailed information about carrier board design techniques, guidelines, and requirements. Contents Part Numbers and Accessories .................................................................................................2 Selecting an Appropriate Mating Connector ....................................................................3 Selecting Appropriate Standoffs.......................................................................................4 -
Freescale Embedded Solutions Based on ARM Technology Guide
Embedded Solutions Based on ARM Technology Kinetis MCUs MAC5xxx MCUs i.MX applications processors QorIQ communications processors Vybrid controller solutions freescale.com/ARM ii Freescale Embedded Solutions Based on ARM Technology Table of Contents ARM Solutions Portfolio 2 i.MX Applications Processors 18 i.MX 6 series applications processors 20 Freescale Embedded Solutions Chart 4 i.MX53 applications processors 22 i.MX28 applications processors 23 Kinetis MCUs 6 Kinetis K series MCUs 7 i.MX and QorIQ Kinetis L series MCUs 9 Processor Comparison 24 Kinetis E series MCUs 11 Kinetis V series MCUs 12 Kinetis M series MCUs 13 QorIQ Communications Kinetis W series MCUs 14 Processors 25 Kinetis EA series MCUs 15 QorIQ LS1 family 26 QorIQ LS2 family 29 MAC5xxx MCUs 16 MAC57D5xx MCUs 17 Vybrid Controller Solutions 31 Vybrid VF3xx family 33 Vybrid VF5xx family 34 Vybrid VF6xx family 35 Design Resources 36 Freescale Enablement Solutions 37 Freescale Connect Partner Enablement Solutions 51 freescale.com/ARM 1 Scalable. Innovative. Leading. Your Number One Choice for ARM Solutions Freescale is the leader in embedded control, offering the market’s broadest and best-enabled portfolio of solutions based on ARM® technology. Our end-to-end portfolio of high-performance, power-efficient MCUs and digital networking processors help realize the potential of the Internet of Things, reflecting our unique ability to deliver scalable, systems- focused processing and connectivity. Our large ARM-powered portfolio includes enablement (software and tool) bundles scalable MCU and MPU families from small from Freescale and the extensive ARM ultra-low-power Kinetis MCUs to i.MX ecosystem.