Operation, Tetrode, Pentode in the Single-Ended, Class-A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MI Amplification
MI Amplification Owner’s Manual 1 1. Welcome ....................................................................................................................................... 4 2. Precautions................................................................................................................................... 5 3. Amp Overview .............................................................................................................................. 6 3.1. Preamp.............................................................................................................................................. 6 3.2. Power Amp ....................................................................................................................................... 6 3.3. FX Loops .......................................................................................................................................... 7 3.4. Operating Modes ............................................................................................................................. 7 4. Getting Started ............................................................................................................................. 8 5. The Channels ............................................................................................................................... 9 5.1. Introduction ..................................................................................................................................... 9 5.2. Channel 1 ......................................................................................................................................... -

El156 Audio Power
EL156 AUDIO POWER Gerhard Haas Thanks to its robustness, the legendary EL156 audio power pentode has found its way into many professional amplifier units. Its attraction derives not just from its appealing shape, but also from its impressive audio characteristics. We therefore bring you this classical circuit, updated using high- quality modern components. 28 elektor electronics - 3/2005 AMPLIFIER Return of a legend The EL156 was manufactured in the enough to give adequate sensitivity, electrolytic capacitor: this voltage is legendary Telefunken valve factory in even before allowing any margin for further filtered on the amplifier board. Ulm, near the river Danube in Ger- negative feedback. The ECC81 many. The EL156 made amplifiers with (12AT7), however, which has an open- It is not possible to build an ultra-lin- an output power of up to 130 W possi- loop gain of 60 and which can be oper- ear amplifier using the EL156 with a ble, using just two valves in the output ated with anode currents of up to high anode voltage. The same goes for stage and one driver valve. Genuine 10 mA, can be used to build a suitably the EL34. The output transformer is EL156s are no longer available new at low-impedance circuit. therefore connected in such a way that realistic prices, and hardly any are Two EL156s can be used to produce an the impedance of the grid connection available second-hand. The original output power of 130 W with only 6 % to the output valve is much lower than devices used a metal valve base which distortion. -

Ronnie Earl for a Blackface Vibroverb Today? Surely Something North of $4,000
Mountainview Publishing, LLC INSIDE the The Truth… Rarely given, we know it when we hear it, and you The Player’s Guide to Ultimate Tone TM can only get it here… $15.00 US, December 2013/Vol.15 NO.2 Report The Kansas Tornado… Another immensely tone- Truth ful classic amp that went unclaimed “Three chords and the truth – that’s what a country song is.” – Willie Nelson Size matters… Pressure is being asked point-blank which guitar, amplifier or pickup to buy. This happens frequent- The Warehouse ly enough that we have learned to pose probing personal questions in search of an answer… Well, G15A Alnico what do you think you might want and why? We don’t always know what we want until we want it, Big Fifteen and we still couldn’t always tell you why. Sometimes the things that last seem to materialize out of no where with little forethought or insight, as if we were meant to have them, and that’s the truth. 4 Richard Goodsell and the evolution of the Goodsell Super 17 Our review of the Super 17 Mark IV 10 The Goodsell overdrive 10 John McGuire Guitars Our interview with John McGuire & review of the McGuire Tradition 14 The Eastwood Jupiter Pro… We also must confess that we don’t always understand what motivates guitar players when it Simply cool comes to choosing amplifiers today. This is nothing new – most of the amps we own are immensely in every way toneful classic keepers that were ignored by potential buyers due to stripped or recovered original cabinets or a replaced transformer. -

Valve Biasing
VALVE AMP BIASING Biased information How have valve amps survived over 30 years of change? Derek Rocco explains why they are still a vital ingredient in music making, and talks you through the mysteries of biasing N THE LAST DECADE WE HAVE a signal to the grid it causes a water as an electrical current, you alter the negative grid voltage by seen huge advances in current to flow from the cathode to will never be confused again. When replacing the resistor I technology which have the plate. The grid is also known as your tap is turned off you get no to gain the current draw required. profoundly changed the way we the control grid, as by varying the water flowing through. With your Cathode bias amplifiers have work. Despite the rise in voltage on the grid you can control amp if you have too much negative become very sought after. They solid-state and digital modelling how much current is passed from voltage on the grid you will stop have a sweet organic sound that technology, virtually every high- the cathode to the plate. This is the electrical current from flowing. has a rich harmonic sustain and profile guitarist and even recording known as the grid bias of your amp This is known as they produce a powerful studios still rely on good ol’ – the correct bias level is vital to the ’over-biased’ soundstage. Examples of these fashioned valves. operation and tone of the amplifier. and the amp are most of the original 1950’s By varying the negative grid will produce Fender tweed amps such as the What is a valve? bias the technician can correctly an unbearable Deluxe and, of course, the Hopefully, a brief explanation will set up your amp for maximum distortion at all legendary Vox AC30. -

The EL34 Power Tube HI-'I
The EL34 Power Tube HI-'I .... o.l"r A lp Musical Evaluations of a Classic Design .... A_I . 4.551 Single. Ended EL·84 Stereo Amp ~ _ .... ,���\� . -""" ".. - ...-., p.,.��",-, �. 1""""' -�,�.. � . oPf' ' ".".. ._ '" "'� .,_ "'�•• '" "'� ...- ' ,t\1".' ,w ' � "'\)U'�..,. ,\ 1\ ' ��-;---""\.\. ",.-" " ".,... "", ""�_ " tt"�" ,....-" ...........,...1"'" '�" ""t\1 _,.,.""" ....'" 'r·\ �'� . � ......,. �,,,. � ,..' ",...., \PJOl8'i .... �,�oPf',.,....;:.. O\ �,cl\ ., .... " , � ...,,.. AA �r- . · :::- ,,<,<, ,. ..""'"':k ...0'\1. � ':;: "",;: .. .._ " r ,...,.. _ "" " .-;.,,...""".... ",.... ......,.,.,,, -;;. ,... :;..,� _ """;.... -� . 0 """ " . ,,..,. ,t" ,,'" <""" , .-_,.;.;.''' � .. '''''''-o<f' _ ....;;; .,;::; , -- '" " ,.,...,.. "" .'" ::, ,t"� ��. ...,.,..,.;.;."1"" ''/'''' � _.� "" f"'� . � ' M'''" ' "- """",,; ,.of .,.,..� .. ...,. ' "' 1" '". '_1"""' . .. " ,,,,,,,,,,,,,,,_ f"""";""';..::: .,... " '�,;;.;:' ' ......,,..,..,. _-:: -__':1oPf' ::;;'", --''''"", ""","" ", ' �':::', � ' ""r; """"-"' .''''''''�}.. ,t\1 \ �·, � ot ,;: "" � ,.,. ---� , _.at" � t\JV" �� � 'i"'f'- " .::... .. .... �. , ,�,....,.' .....;. _ ...-:> ".... JC8'I\\ -, \�..- WOl\ """,.""''1"'"- �""'" � '-,�� 6<1\"""- ' ""'..,... � ...... � 6U'." �. - ,t\1 , . _ , "'" 1J>b\"� ��, oPf''' .,..-._ " "" .0. " ..... ���_���\t"�'".. ' ....... "" "",",. N ��:L [\l\'J � ��i y< • D T 0 • , 5 P A G • A N D N D u 5 T • y N • w 5 Beware of FakeNOS Tubes! CE Distribution US Distributor for Electronic Tubes VTV Issue # 1 6 JJ Over the last year or so, we have JJ Electronic, -
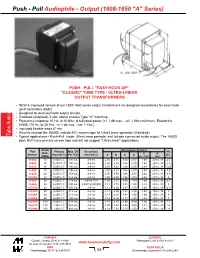
Push - Pull Audiophile - Output (1608-1650 "A" Series)
Push - Pull Audiophile - Output (1608-1650 "A" Series) PUSH - PULL "EASY HOOK-UP" "CLASSIC" TUBE TYPE - ULTRA-LINEAR OUTPUT TRANSFORMERS • NEW & Improved version of our 1608-1650 series output transformers (re-designed secondaries for easy hook- up of secondary loads) • Designed for push-pull tube output circuits. o • Enclosed (shielded), 4 slot, above chassis Type "X" mounting. • Frequency response 30 Hz. to 30 Khz. at full rated power (+/- 1 db max. - ref. 1 Khz) minimum. Except the Audi 1650E (70 Hz. to 30 Khz. +/- 1 db max. - ref. 1 Khz.) be • Insulated flexible leads 8" min. • All units (except the 1650G) include 40% screen taps for Ultra-Linear operation (if desired). Tu • Typical applications - Push-Pull: triode, Ultra-Linear pentode, and tetrode connected audio output. The 1650G does NOT have primary screen taps and will not support "Ultra-Linear" applications. Audio Dimensions (Inches) Part Primary Max. DC Secondary Wt. Watts E G Number Impedance Per Side Impedance A B C D Lbs. (RMS) +/- 1/16” Slot 1608A 10 8,000 C.T. 100 ma. 4-8-16 2.50 2.75 3.06 2.00 1.69 .203 x .38 2.5 1609A 10 10,000 C.T. 100 ma. 4-8-16 2.50 2.75 3.06 2.00 1.69 .203 x .38 2.5 1615A 15 5,000 C.T. 100 ma. 4-8-16 2.50 3.25 3.06 2.00 2.19 .203 x .38 3.25 1650E 15 8,000 C.T. 100 ma. 4-8-16 2.50 3.25 3.06 2.00 2.50 .203 x .38 3.5 1620A 20 6,600 C.T. -

Bias-Easy 1200™ Bias Tester Instructions
Bias-Easy 1200™ Bias Tester Instructions 1. Turn off your amp, and allow to cool down. The Bias-Easy 1200™ is primarily for amplifiers using four 8-pin power tubes with a bias adjustment potentiometer available inside or on the chassis underside or back panel of the amp. 2. Remove one of the power tubes (6L6, EL34, 5881, 6550, 6V6, KT66, KT77, etc) 3. Insert a Bias-Easy™ probe into the power tube socket, making sure to line up the key on the probe post with the key in the center hole of the socket. Repeat for the second, third and fourth power tubes with each of the remaining probes. If your amp only has two power tubes, we suggest using the A and B probes. The C and D probes may be unplugged from the Bias-Easy™ in that case. 4. Insert each tube you removed into each socket of the Bias-Easy™. Make sure the key on the tube base is properly lined up with the key on the center hole of the socket. All power tube(s) must be in place in their sockets during testing. 5. Make certain that a speaker is connected to the amp. If this is an amp head, connect a cable between the speaker jack and the speaker cabinet. 6. Make sure all bias probes to be used in the testing are connected to the jacks at the top of the Bias-Easy™. Connect the power supply cord to the jack on the bottom of the Bias-Easy™, and connect the USB connector on the cord to the power supply. -

Pentodes Connected As Triodes
Pentodes connected as Triodes by Tom Schlangen Pentodes connected as Triodes About the author Tom Schlangen Born 1962 in Cologne / Germany Studied mechanical engineering at RWTH Aachen / Germany Employments as „safety engineering“ specialist and CIO / IT-head in middle-sized companies, now owning and running an IT- consultant business aimed at middle-sized companies Hobby: Electron valve technology in audio Private homepage: www.tubes.mynetcologne.de Private email address: [email protected] Tom Schlangen – ETF 06 2 Pentodes connected as Triodes Reasons for connecting and using pentodes as triodes Why using pentodes as triodes at all? many pentodes, especially small signal radio/TV ones, are still available from huge stock cheap as dirt, because nobody cares about them (especially “TV”-valves), some of them, connected as triodes, can rival even the best real triodes for linearity, some of them, connected as triodes, show interesting characteristics regarding µ, gm and anode resistance, that have no expression among readily available “real” triodes, because it is fun to try and find out. Tom Schlangen – ETF 06 3 Pentodes connected as Triodes How to make a triode out of a tetrode or pentode again? Or, what to do with the “superfluous” grids? All additional grids serve a certain purpose and function – they were added to a basic triode system to improve the system behaviour in certain ways, for example efficiency. We must “disable” the functions of those additional grids in a defined and controlled manner to regain triode characteristics. Just letting them “dangle in vacuum unconnected” will not work – they would charge up uncontrolled in the electron stream, leading to unpredictable behaviour. -

Tube Output (10 - 280 Watts) (1608-1650 Series) - Hammond Mfg
9/6/2021 Tube Output (10 - 280 Watts) (1608-1650 Series) - Hammond Mfg. Quality Products. Service Excellence. Tube Output (10 - 280 Watts) 1608-1650 Series Push-Pull - HI-FI Features Please see our NEW & improved versions (easy wire secondary series). Designed for push-pull tube output circuits. Enclosed (shielded), 4 slot, above chassis Type "X" mounting. Frequency response 30 Hz. to 30 Khz. at full rated power (+/- 1 db max. - ref. 1 Khz) minimum. Insulated flexible leads 8" min. Manufactured with plastic coil forms for coil support and insulation. Typical applications - Push-Pull: triode, Ultra-Linear pentode, pentode and tetrode connected audio output. Due to the unique interleaving of the windings BOTH secondary windings must be engaged to meet specifications (see hook-up diagrams below). For the "ultimate" in Push-Pull output see our line of epoxy potted output transformers. 1645 Only Secondary Connections (Due to the unique interleaving of the windings BOTH secondary windings must be engaged to meet specifications) To hook up 4/8/16 ohm secondary loads - see schematic (do not use the white wire). To hook up secondary to 70V loads, jumper Blk/Yel wire to Grn wire. Connect load to Blk and White wires. Gallery Audio Primary Maximum Secondary Dimensions Watts Impedance DC Impedance E G Weight Part No. (RMS) (Ohms) Per Side (Ohms) A B C D +/- 1/16" Slot (lbs.) https://www.hammfg.com/electronics/transformers/classic/1608-1650 1/2 9/6/2021 Tube Output (10 - 280 Watts) (1608-1650 Series) - Hammond Mfg. Audio Primary Maximum Secondary Dimensions Watts Impedance DC Impedance E G Weight Part No. -

A Relatively Simple Device for Recording Radiation Intensities in The
A RELATIVELY SIMPLE DEVICE FOR RECORDING RADIATION INTENSITIES IN HE ULTRAVIOLET PORTION OF THE SPECTRUM by HENRY WALLACE HENDRICKS A THESIS submitted to OREGON STATE COLLEGE in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE June 19S0 APPROVED: Professor of Physics In Charge of Major Chairman of School Graduate Committee Dean of Graduate School ACKN OWLEDGMENT Sincere appreciation and thanks are expressed to Dr. Weniger for his interest and assistance in the preparation of this thesis. TABLE OF CONThNTS a ge I NTROD[JCTION . ..... , . i Statement of . Problem . i Some Basic Information about Ultraviolet, Sun and Sky Radiation, Its Biological Etc. Effectiveness, . 1 INSTRUMLNTS FOR RECORDING ULTRAVIOLET INTENSITIES . 3 DESIGNOONSIDERATIONS. ... .. .. The R e e e i y e . r ....... The . Receiving Circuit . 9 The R e c o e . rd r . 9 . ThePowerSupply . .10 EX>ERIMENTAL . 1)EVELOPMENT . 11 THE FINAL CIRCUIT AND . 7OER SUPPLY . 16 PREPARATION AND SILVERING OF THE QUARTZ PLATES . 20 THERECEIVERUNIT..................23 TESTOFAPPARATtJS . .26 Adjustment8 . 26 Results and Conclusions . 27 . Data . 3]. BILIOGRAPHY . 37 LIST OF ILLUBTRATIONS Figure Page J. Spectral Sensitivfty of the S Photocathode 6 2 OriginalCircuit . 12 3 First Vacuum Tube Circuit . 12 Lj. Variation of the Counts per Minute with Filament Voltage . 11i The Final Circuit . ........ 17 6 The Power Suoply, Counter and Receiver . 22 The 7 Receiver ............... 2)4. 8 Step-diagram from Data ObtaIned on MaylO,l9O ............. 28 9 Step-diagram from Data Obtained on Mayll,l9O ............. 29 10 Step-diagram from Data Obtained on Mayl2,l95O ......... .. 30 A RELATIVELY SIMPLE DEVICE FOR RECORDING RADIATION .LNTENSITIES IN T}IE ULTRAVIOLET PORTION OF THE SPECTRUM INTRODUCTION Statement of Problem The purpose of this thesis is to develop a more or less portable aiaratua that will measure ultraviolet energy in or near the erythemal region. -

(P-Yjnos) 425.59 Kb
Designed by ® Designed by ® Designed by ® Designed by ® Designed by ® Yellow Jackets® Yellow Jackets® Yellow Jackets® Yellow Jackets® Yellow Jackets® Tube Converter Tube Converter Tube Converter Tube Converter Tube Converter YJNOS YJNOS YJNOS YJNOS YJNOS Includes NOS 6AQ5 Tubes Includes NOS 6AQ5 Tubes Includes NOS 6AQ5 Tubes Includes NOS 6AQ5 Tubes Includes NOS 6AQ5 Tubes Handmade in the U.S.A. Handmade in the U.S.A. Handmade in the U.S.A. Handmade in the U.S.A. Handmade in the U.S.A. Yellow Jackets® Yellow Jackets® Yellow Jackets® Yellow Jackets® Yellow Jackets® • Converts most audio amplifiers with 6L6, EL34, • Converts most audio amplifiers with 6L6, EL34, • Converts most audio amplifiers with 6L6, EL34, • Converts most audio amplifiers with 6L6, EL34, • Converts most audio amplifiers with 6L6, EL34, 7027, or 6V6 tubes to 6AQ5s without modification 7027, or 6V6 tubes to 6AQ5s without modification 7027, or 6V6 tubes to 6AQ5s without modification 7027, or 6V6 tubes to 6AQ5s without modification 7027, or 6V6 tubes to 6AQ5s without modification or rebiasing. or rebiasing. or rebiasing. or rebiasing. or rebiasing. • Converts from Class AB to Class A operation! • Converts from Class AB to Class A operation! • Converts from Class AB to Class A operation! • Converts from Class AB to Class A operation! • Converts from Class AB to Class A operation! • Lowers the overall power in your amplifier. • Lowers the overall power in your amplifier. • Lowers the overall power in your amplifier. • Lowers the overall power in your amplifier. • Lowers the overall power in your amplifier. • Safe for all common amplifiers and transformers. -

The 18 Watt Amp Builder's Guide
The 18 Watt Amp Builder's Guide April 2018, Version 3.0 For the sole personal use of Trinity Amps Customers. Parts © Trinity Amps 2005 - 2017 www.trinityamps.com Trinity Amps 18 Watt Builder’s Guide. Version 3.0 Page - 2 Table of Contents Table of Contents .................................................................................................................................................. 3 Thank You! ............................................................................................................................................................ 5 Introduction .......................................................................................................................................................... 7 Acknowledgements ............................................................................................................................................... 7 WARNING............................................................................................................................................................ 8 Version Control ..................................................................................................................................................... 9 Fender and Marshall Tone controls ..................................................................................................................................................... 13 VOX Tone controls ...............................................................................................................................................................................