Accelerating Real-Time Graphics with High Level Shading Languages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Amd Filed: February 24, 2009 (Period: December 27, 2008)
FORM 10-K ADVANCED MICRO DEVICES INC - amd Filed: February 24, 2009 (period: December 27, 2008) Annual report which provides a comprehensive overview of the company for the past year Table of Contents 10-K - FORM 10-K PART I ITEM 1. 1 PART I ITEM 1. BUSINESS ITEM 1A. RISK FACTORS ITEM 1B. UNRESOLVED STAFF COMMENTS ITEM 2. PROPERTIES ITEM 3. LEGAL PROCEEDINGS ITEM 4. SUBMISSION OF MATTERS TO A VOTE OF SECURITY HOLDERS PART II ITEM 5. MARKET FOR REGISTRANT S COMMON EQUITY, RELATED STOCKHOLDER MATTERS AND ISSUER PURCHASES OF EQUITY SECURITIES ITEM 6. SELECTED FINANCIAL DATA ITEM 7. MANAGEMENT S DISCUSSION AND ANALYSIS OF FINANCIAL CONDITION AND RESULTS OF OPERATIONS ITEM 7A. QUANTITATIVE AND QUALITATIVE DISCLOSURE ABOUT MARKET RISK ITEM 8. FINANCIAL STATEMENTS AND SUPPLEMENTARY DATA ITEM 9. CHANGES IN AND DISAGREEMENTS WITH ACCOUNTANTS ON ACCOUNTING AND FINANCIAL DISCLOSURE ITEM 9A. CONTROLS AND PROCEDURES ITEM 9B. OTHER INFORMATION PART III ITEM 10. DIRECTORS, EXECUTIVE OFFICERS AND CORPORATE GOVERNANCE ITEM 11. EXECUTIVE COMPENSATION ITEM 12. SECURITY OWNERSHIP OF CERTAIN BENEFICIAL OWNERS AND MANAGEMENT AND RELATED STOCKHOLDER MATTERS ITEM 13. CERTAIN RELATIONSHIPS AND RELATED TRANSACTIONS AND DIRECTOR INDEPENDENCE ITEM 14. PRINCIPAL ACCOUNTANT FEES AND SERVICES PART IV ITEM 15. EXHIBITS, FINANCIAL STATEMENT SCHEDULES SIGNATURES EX-10.5(A) (OUTSIDE DIRECTOR EQUITY COMPENSATION POLICY) EX-10.19 (SEPARATION AGREEMENT AND GENERAL RELEASE) EX-21 (LIST OF AMD SUBSIDIARIES) EX-23.A (CONSENT OF ERNST YOUNG LLP - ADVANCED MICRO DEVICES) EX-23.B -
Scalability of Terrain Visualization in Large Virtual Environments
WORDT ' Facultyof Mathematics and Natural Department of NIET UITGELEEND Mathematics and Computing Science Scalability of Terrain Visualization in Large Virtual Environments Esger G.N. Abbink Advisors: dr. J.B.TM. Roerdink Department of Mathematics and Computing Science University of Groningen drs. M.J.B. van Delden drs. M. Wierda Virtual Environments, Systems, and Consultancy Zeegse .(,-,-, June,2000 Rkunlv,,,IOIOi*S DDothk W1s*ud. 'iMP* IRS&SIICSIWI'U :.'von S r-;tus800 9' Avr')1rs.r Scalability of terrain visualization in large Virtual Environments Esger G.N. Abbink Department of Mathematics and Computing Science Graduate specialization High Performance Computing and Imaging Studentnumber 0831425 Gerkesklooster/ Zeegse, April 2000 Rapport vesc WR-2000/3 •1 Table of Contents Scalability of terrain visualization in large Virtual Environments..1 1. Introduction 4 2. Virtual Environments 6 2.1 Startingpoints 6 2.2 Means-end analysis 6 2.3 Man-in-the-loop 6 2.4 Hardware 8 2.5 Real-world simulators 9 2.5.1 Flight Simulators 9 2.5.2 Driving Simulators 9 2.5.3 Rail vehicle simulators 10 2.5.4 Ship Simulator 11 2.5.5 yE Walkthrough 11 2.5.6 Entertainment Simulators 12 2.5.7 Telepresence 12 2.5.8 Virtual GIS 13 2.6 Summary & practical continuation 13 3. Scalable terrain visualization 15 3.1 Introduction 15 3.2 The sample implementation 15 3.2.1 Introduction 15 3.2.2 Getting it to work 15 3.2.3 Porting the sample implementation to 4Space 16 3.3 Design 16 3.3.1 Goal 16 3.3.2 Requirements 16 3.3.3 Terrain representation 16 3.3.4 Basic setup 18 3.3.5 Tessellation algorithm 19 3.3.6 Implementation approach 23 3.4 Implementation 24 3.4.1 Terrain data generation 24 3.4.2 Implementing Central Differencing 24 3.4.2 Interfacing 4Space 28 3.4.3 Memory management 29 3.4.4 Dynamic data storages 30 3.4.4.1 Queue 30 3.4.4.2 Dynamic List & Pool 31 3.4.4.3 Red-Black Tree 31 3.4.4.4 Dynamic Storage 32 3.4.4.5 Evaluating performance 33 2 4. -
DRAFT - DATED MATERIAL the CONTENTS of THIS REVIEWER’S GUIDE IS INTENDED SOLELY for REFERENCE WHEN REVIEWING Rev a VERSIONS of VOODOO5 5500 REFERENCE BOARDS
Voodoo5™ 5500 for the PC Reviewer’s Guide DRAFT - DATED MATERIAL THE CONTENTS OF THIS REVIEWER’S GUIDE IS INTENDED SOLELY FOR REFERENCE WHEN REVIEWING Rev A VERSIONS OF VOODOO5 5500 REFERENCE BOARDS. THIS INFORMATION WILL BE REGULARLY UPDATED, AND REVIEWERS SHOULD CONTACT THE PERSONS LISTED IN THIS GUIDE FOR UPDATES BEFORE EVALUATING ANY VOODOO5 5500BOARD. 3dfx Interactive, Inc. 4435 Fortran Dr. San Jose, Ca 95134 408-935-4400 Brian Burke 214-570-2113 [email protected] PT Barnum 214-570-2226 [email protected] Bubba Wolford 281-578-7782 [email protected] www.3dfx.com www.3dfxgamers.com Copyright 2000 3dfx Interactive, Inc. All Rights Reserved. All other trademarks are the property of their respective owners. Visit the 3dfx Virtual Press Room at http://www.3dfx.com/comp/pressweb/index.html. Voodoo5 5500 Reviewers Guide xxxx 2000 Table of Contents Benchmarking the Voodoo5 5500 Page 5 • Cures for common benchmarking and image quality mistakes • Tips for benchmarking • Overclocking Guide INTRODUCTION Page 11 • Optimized for DVD Acceleration • Scalable Performance • Trend-setting Image quality Features • Texture Compression • Glide 2.x and 3.x Compatibility: The Most Titles • World-class Window’s GUI/video Acceleration SECTION 1: Voodoo5 5500 Board Overview Page 12 • General Features • 3D Features set • 2D Features set • Voodoo5 Video Subsystem • SLI • Texture compression • Fill Rate vs T&L • T-Buffer introduction • Alternative APIs (Al Reyes on Mac, Linux, BeOS and more) • Pricing & Availability • Warranty • Technical Support • Photos, screenshots, -

Advanced Computer Graphics to Do Motivation Real-Time Rendering
To Do Advanced Computer Graphics § Assignment 2 due Feb 19 § Should already be well on way. CSE 190 [Winter 2016], Lecture 12 § Contact us for difficulties etc. Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir Motivation Real-Time Rendering § Today, create photorealistic computer graphics § Goal: interactive rendering. Critical in many apps § Complex geometry, lighting, materials, shadows § Games, visualization, computer-aided design, … § Computer-generated movies/special effects (difficult or impossible to tell real from rendered…) § Until 10-15 years ago, focus on complex geometry § CSE 168 images from rendering competition (2011) § § But algorithms are very slow (hours to days) Chasm between interactivity, realism Evolution of 3D graphics rendering Offline 3D Graphics Rendering Interactive 3D graphics pipeline as in OpenGL Ray tracing, radiosity, photon mapping § Earliest SGI machines (Clark 82) to today § High realism (global illum, shadows, refraction, lighting,..) § Most of focus on more geometry, texture mapping § But historically very slow techniques § Some tweaks for realism (shadow mapping, accum. buffer) “So, while you and your children’s children are waiting for ray tracing to take over the world, what do you do in the meantime?” Real-Time Rendering SGI Reality Engine 93 (Kurt Akeley) Pictures courtesy Henrik Wann Jensen 1 New Trend: Acquired Data 15 years ago § Image-Based Rendering: Real/precomputed images as input § High quality rendering: ray tracing, global illumination § Little change in CSE 168 syllabus, from 2003 to -
Mobile 3D Devices They're Not Little
Mobile 3D Devices -- They’re not little PCs! Stephen Wilkinson – Graphics Software Technical Lead Texas Instruments CSSD/OMAP Who is this guy? ! Involved with simulation and games since 1995 ! Worked on SIMNET for the US Army ! PC gaming ! Titles include WarBirds 1 & 2, Fighter Squadron, AMA SuperBike, NHRA Drag Racing, NHRA Main Event ! 30+ Casino Games (yeah, yeah) ! Worked on core technology for several console games ! D&D Heroes, Mission Impossible: Operation SURMA, and T3: Redemption (NGC, PS2, Xbox) ! Former member of the Graphics and Computer Vision group at Nokia Research Center ! Now the CSSD graphics software technical lead at Texas Instruments working on OMAP Introduction ! Mobile 3D hardware is not a “Mini-me” of your desktop PC. ! To obtain similar features and relatively high levels of performance, mobile hardware has made some tradeoffs compared to the power of your desktop Introduction… ! If you are just learning mobile 3D or have learned about graphics and performance on a more “traditional” platform such as a PC or console, this presentation should help you: ! Recognize the most important areas in mobile power and performance for 3D and game development ! Take appropriate lessons learned from desktop development whenever possible… ! Avoid lessons from the desktop which can make your game slower or more power-hungry than it could be! Mobile performance preview ! Some you know, some you may not… Sorted by acronym the main problems are: ! CPU ! GPU ! Memory ! Your game The Mobile CPU ! No, it doesn’t have a Hemi. The Mobile GPU ! No, there’s not really a tiny 3dfx Voodoo™ card in that handset Mobile Memory ! It’s SLOOOOOOOW…. -
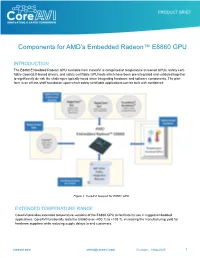
AMD Radeon E8860
Components for AMD’s Embedded Radeon™ E8860 GPU INTRODUCTION The E8860 Embedded Radeon GPU available from CoreAVI is comprised of temperature screened GPUs, safety certi- fiable OpenGL®-based drivers, and safety certifiable GPU tools which have been pre-integrated and validated together to significantly de-risk the challenges typically faced when integrating hardware and software components. The plat- form is an off-the-shelf foundation upon which safety certifiable applications can be built with confidence. Figure 1: CoreAVI Support for E8860 GPU EXTENDED TEMPERATURE RANGE CoreAVI provides extended temperature versions of the E8860 GPU to facilitate its use in rugged embedded applications. CoreAVI functionally tests the E8860 over -40C Tj to +105 Tj, increasing the manufacturing yield for hardware suppliers while reducing supply delays to end customers. coreavi.com [email protected] Revision - 13Nov2020 1 E8860 GPU LONG TERM SUPPLY AND SUPPORT CoreAVI has provided consistent and dedicated support for the supply and use of the AMD embedded GPUs within the rugged Mil/Aero/Avionics market segment for over a decade. With the E8860, CoreAVI will continue that focused support to ensure that the software, hardware and long-life support are provided to meet the needs of customers’ system life cy- cles. CoreAVI has extensive environmentally controlled storage facilities which are used to store the GPUs supplied to the Mil/ Aero/Avionics marketplace, ensuring that a ready supply is available for the duration of any program. CoreAVI also provides the post Last Time Buy storage of GPUs and is often able to provide additional quantities of com- ponents when COTS hardware partners receive increased volume for existing products / systems requiring additional inventory. -

John Carmack Archive - .Plan (1998)
John Carmack Archive - .plan (1998) http://www.team5150.com/~andrew/carmack March 18, 2007 Contents 1 January 5 1.1 Some of the things I have changed recently (Jan 01, 1998) . 5 1.2 Jan 02, 1998 ............................ 6 1.3 New stuff fixed (Jan 03, 1998) ................. 7 1.4 Version 3.10 patch is now out. (Jan 04, 1998) ......... 8 1.5 Jan 09, 1998 ............................ 9 1.6 I AM GOING OUT OF TOWN NEXT WEEK, DON’T SEND ME ANY MAIL! (Jan 11, 1998) ................. 10 2 February 12 2.1 Ok, I’m overdue for an update. (Feb 04, 1998) ........ 12 2.2 Just got back from the Q2 wrap party in vegas that Activi- sion threw for us. (Feb 09, 1998) ................ 14 2.3 Feb 12, 1998 ........................... 15 2.4 8 mb or 12 mb voodoo 2? (Feb 16, 1998) ........... 19 2.5 I just read the Wired article about all the Doom spawn. (Feb 17, 1998) .......................... 20 2.6 Feb 22, 1998 ........................... 21 1 John Carmack Archive 2 .plan 1998 3 March 22 3.1 American McGee has been let go from Id. (Mar 12, 1998) . 22 3.2 The Old Plan (Mar 13, 1998) .................. 22 3.3 Mar 20, 1998 ........................... 25 3.4 I just shut down the last of the NEXTSTEP systems running at id. (Mar 21, 1998) ....................... 26 3.5 Mar 26, 1998 ........................... 28 4 April 30 4.1 Drag strip day! (Apr 02, 1998) ................. 30 4.2 Things are progressing reasonably well on the Quake 3 en- gine. (Apr 08, 1998) ....................... 31 4.3 Apr 16, 1998 .......................... -

AMD Codexl 1.7 GA Release Notes
AMD CodeXL 1.7 GA Release Notes Thank you for using CodeXL. We appreciate any feedback you have! Please use the CodeXL Forum to provide your feedback. You can also check out the Getting Started guide on the CodeXL Web Page and the latest CodeXL blog at AMD Developer Central - Blogs This version contains: For 64-bit Windows platforms o CodeXL Standalone application o CodeXL Microsoft® Visual Studio® 2010 extension o CodeXL Microsoft® Visual Studio® 2012 extension o CodeXL Microsoft® Visual Studio® 2013 extension o CodeXL Remote Agent For 64-bit Linux platforms o CodeXL Standalone application o CodeXL Remote Agent Note about installing CodeAnalyst after installing CodeXL for Windows AMD CodeAnalyst has reached End-of-Life status and has been replaced by AMD CodeXL. CodeXL installer will refuse to install on a Windows station where AMD CodeAnalyst is already installed. Nevertheless, if you would like to install CodeAnalyst, do not install it on a Windows station already installed with CodeXL. Uninstall CodeXL first, and then install CodeAnalyst. System Requirements CodeXL contains a host of development features with varying system requirements: GPU Profiling and OpenCL Kernel Debugging o An AMD GPU (Radeon HD 5000 series or newer, desktop or mobile version) or APU is required. o The AMD Catalyst Driver must be installed, release 13.11 or later. Catalyst 14.12 (driver 14.501) is the recommended version. See "Getting the latest Catalyst release" section below. For GPU API-Level Debugging, a working OpenCL/OpenGL configuration is required (AMD or other). CPU Profiling o Time-Based Profiling can be performed on any x86 or AMD64 (x86-64) CPU/APU. -

Opengl ES, XNA, Directx for WP8) Plan
Mobilne akceleratory grafiki Kamil Trzciński, 2013 O mnie Kamil Trzciński http://ayufan.eu / [email protected] ● Od 14 lat zajmuję się programowaniem (C/C++, Java, C#, Python, PHP, itd.) ● Od 10 lat zajmuję się programowaniem grafiki (OpenGL, DirectX 9/10/11, Ray-Tracing) ● Od 6 lat zajmuję się branżą mobilną (SymbianOS, Android, iOS) ● Od 2 lat zajmuję się mobilną grafiką (OpenGL ES, XNA, DirectX for WP8) Plan ● Bardzo krótko o historii ● Mobilne układy graficzne ● API ● Programowalne jednostki cieniowania ● Optymalizacja ● Silniki graficzne oraz silniki gier Wstęp Grafika komputerowa to dziedzina informatyki zajmująca się wykorzystaniem technik komputerowych do celów wizualizacji artystycznej oraz wizualizacji rzeczywistości. Bardzo często grafika komputerowa jest kojarzona z urządzeniem wspomagającym jej generowanie - kartą graficzną, odpowiedzialna za renderowanie grafiki oraz jej konwersję na sygnał zrozumiały dla wyświetlacza 1. Historia Historia Historia kart graficznych sięga wczesnych lat 80-tych ubiegłego wieku. Pierwsze karty graficzne potrafiły jedynie wyświetlać znaki alfabetu łacińskiego ze zdefiniowanego w pamięci generatora znaków, tzw. trybu tekstowego. W późniejszym okresie pojawiły się układy, wykonujące tzw. operacje BitBLT, pozwalające na nałożenie na siebie 2 różnych bitmap w postaci rastrowej. Historia Historia #2 ● Wraz z nadejściem systemu operacyjnego Microsoft Windows 3.0 wzrosło zapotrzebowanie na przetwarzanie grafiki rastrowej dużej rozdzielczości. ● Powstaje interfejs GDI odpowiedzialny za programowanie operacji związanych z grafiką. ● Krótko po tym powstały pierwsze akceleratory 2D wyprodukowane przez firmę S3. Wydarzenie to zapoczątkowało erę graficznych akceleratorów grafiki. Historia #3 ● 1996 – wprowadzenie chipsetu Voodoo Graphics przez firmę 3dfx, dodatkowej karty rozszerzeń pełniącej funkcję akceleratora grafiki 3D. ● Powstają biblioteki umożliwiające tworzenie trójwymiarowych wizualizacji: Direct3D oraz OpenGL. Historia #3 Historia #4 ● 1999/2000 – DirectX 7.0 dodaje obsługę: T&L (ang. -

Sun Opengl 1.3 for Solaris Implementation and Performance Guide
Sun™ OpenGL 1.3 for Solaris™ Implementation and Performance Guide Sun Microsystems, Inc. www.sun.com Part No. 817-2997-11 November 2003, Revision A Submit comments about this document at: http://www.sun.com/hwdocs/feedback Copyright 2003 Sun Microsystems, Inc., 4150 Network Circle, Santa Clara, California 95054, U.S.A. All rights reserved. Sun Microsystems, Inc. has intellectual property rights relating to technology that is described in this document. In particular, and without limitation, these intellectual property rights may include one or more of the U.S. patents listed at http://www.sun.com/patents and one or more additional patents or pending patent applications in the U.S. and in other countries. This document and the product to which it pertains are distributed under licenses restricting their use, copying, distribution, and decompilation. No part of the product or of this document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Third-party software, including font technology, is copyrighted and licensed from Sun suppliers. Parts of the product may be derived from Berkeley BSD systems, licensed from the University of California. UNIX is a registered trademark in the U.S. and in other countries, exclusively licensed through X/Open Company, Ltd. Sun, Sun Microsystems, the Sun logo, SunSoft, SunDocs, SunExpress, and Solaris are trademarks, registered trademarks, or service marks of Sun Microsystems, Inc. in the U.S. and other countries. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. -
Catalyst™ Software Suite Version 9.5 Release Notes
Catalyst™ Software Suite Version 9.5 Release Notes This release note provides information on the latest posting of AMD’s industry leading software suite, Catalyst™. This particular software suite updates both the AMD Display Driver, and the Catalyst™ Control Center. This unified driver has been further enhanced to provide the highest level of power, performance, and reliability. The AMD Catalyst™ software suite is the ultimate in performance and stability. For exclusive Catalyst™ updates follow Catalyst Maker on Twitter. This release note provides information on the following: z Web Content z AMD Product Support z Operating Systems Supported z New Features z Performance Improvements z Resolved Issues for the Windows Vista Operating System z Resolved Issues for the Windows XP Operating System z Resolved Issues for the Windows 7 Operating System z Known Issues Under the Windows Vista Operating System z Known Issues Under the Windows XP Operating System z Known Issues Under the Windows 7 Operating System z Installing the Catalyst™ Vista Software Driver z Catalyst™ Crew Driver Feedback ATI Catalyst™ Release Note Version 9.5 1 Web Content The Catalyst™ Software Suite 9.5 contains the following: z Radeon™ display driver 8.612 z HydraVision™ for both Windows XP and Vista z HydraVision™ Basic Edition (Windows XP only) z WDM Driver Install Bundle z Southbridge/IXP Driver z Catalyst™ Control Center Version 8.612 Caution: The Catalyst™ software driver and the Catalyst™ Control Center can be downloaded independently of each other. However, for maximum stability and performance AMD recommends that both components be updated from the same Catalyst™ release. -

AMD Codexl 1.8 GA Release Notes
AMD CodeXL 1.8 GA Release Notes Contents AMD CodeXL 1.8 GA Release Notes ......................................................................................................... 1 New in this version .............................................................................................................................. 2 System Requirements .......................................................................................................................... 2 Getting the latest Catalyst release ....................................................................................................... 4 Note about installing CodeAnalyst after installing CodeXL for Windows ............................................... 4 Fixed Issues ......................................................................................................................................... 4 Known Issues ....................................................................................................................................... 5 Support ............................................................................................................................................... 6 Thank you for using CodeXL. We appreciate any feedback you have! Please use the CodeXL Forum to provide your feedback. You can also check out the Getting Started guide on the CodeXL Web Page and the latest CodeXL blog at AMD Developer Central - Blogs This version contains: For 64-bit Windows platforms o CodeXL Standalone application o CodeXL Microsoft® Visual Studio®