Integration of Orbital and Ground Data for Martian Crater Mapping A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
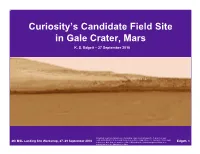
Curiosity's Candidate Field Site in Gale Crater, Mars
Curiosity’s Candidate Field Site in Gale Crater, Mars K. S. Edgett – 27 September 2010 Simulated view from Curiosity rover in landing ellipse looking toward the field area in Gale; made using MRO CTX stereopair images; no vertical exaggeration. The mound is ~15 km away 4th MSL Landing Site Workshop, 27–29 September 2010 in this view. Note that one would see Gale’s SW wall in the distant background if this were Edgett, 1 actually taken by the Mastcams on Mars. Gale Presents Perhaps the Thickest and Most Diverse Exposed Stratigraphic Section on Mars • Gale’s Mound appears to present the thickest and most diverse exposed stratigraphic section on Mars that we can hope access in this decade. • Mound has ~5 km of stratified rock. (That’s 3 miles!) • There is no evidence that volcanism ever occurred in Gale. • Mound materials were deposited as sediment. • Diverse materials are present. • Diverse events are recorded. – Episodes of sedimentation and lithification and diagenesis. – Episodes of erosion, transport, and re-deposition of mound materials. 4th MSL Landing Site Workshop, 27–29 September 2010 Edgett, 2 Gale is at ~5°S on the “north-south dichotomy boundary” in the Aeolis and Nepenthes Mensae Region base map made by MSSS for National Geographic (February 2001); from MOC wide angle images and MOLA topography 4th MSL Landing Site Workshop, 27–29 September 2010 Edgett, 3 Proposed MSL Field Site In Gale Crater Landing ellipse - very low elevation (–4.5 km) - shown here as 25 x 20 km - alluvium from crater walls - drive to mound Anderson & Bell -

Turbulence and Aeolian Morphodynamics in Craters on Mars: Application to Gale Crater, Landing Site of the Curiosity Rover
16TH EUROPEAN TURBULENCE CONFERENCE, 21-24 AUGUST, 2017, STOCKHOLM,SWEDEN TURBULENCE AND AEOLIAN MORPHODYNAMICS IN CRATERS ON MARS: APPLICATION TO GALE CRATER, LANDING SITE OF THE CURIOSITY ROVER William Anderson1, Gary Kocurek2 & Kenzie Day2 1Mechanical Engineering Dept., Univ. Texas at Dallas, Richardson, Texas, USA 2Dept. Geological Sciences, Jackson School of Geosciences, Univ. Texas at Austin, Austin, Texas, USA Mars is a dry planet with a thin atmosphere. Aeolian processes – wind-driven mobilization of sediment and dust – are the dominant mode of landscape variability on the dessicated landscapes of Mars. Craters are common topographic features on the surface of Mars, and many craters on Mars contain a prominent central mound (NASA’s Curiosity rover was landed in Gale crater, shown in Figure 1a [1], while Figures 1b and 1c show Henry and Korolev crater, respectively). These mounds are composed of sedimentary fill and, therefore, they contain rich information on the evolution of climatic conditions on Mars embodied in the stratigraphic “layering” of sediments. Many other craters no longer house a mound, but contain sediment and dust from which dune fields and other features form (see, for example, Victoria Crater, Figure 1d). Using density-normalized large-eddy simulations, we have modeled turbulent flows over crater-like topographies that feature a central mound. Resultant datasets suggest a deflationary mechanism wherein vortices shed from the upwind crater rim are realigned to conform to the crater profile via stretching and tilting. This was accomplished using three- dimensional datasets (momentum and vorticity) retrieved from LES. As a result, helical vortices occupy the inner region of the crater and, therefore, are primarily responsible for aeolian morphodynamics in the crater (radial katabatic flows are also important to aeolian processes within the crater [2]). -

Educator's Guide
EDUCATOR’S GUIDE ABOUT THE FILM Dear Educator, “ROVING MARS”is an exciting adventure that This movie details the development of Spirit and follows the journey of NASA’s Mars Exploration Opportunity from their assembly through their Rovers through the eyes of scientists and engineers fantastic discoveries, discoveries that have set the at the Jet Propulsion Laboratory and Steve Squyres, pace for a whole new era of Mars exploration: from the lead science investigator from Cornell University. the search for habitats to the search for past or present Their collective dream of Mars exploration came life… and maybe even to human exploration one day. true when two rovers landed on Mars and began Having lasted many times longer than their original their scientific quest to understand whether Mars plan of 90 Martian days (sols), Spirit and Opportunity ever could have been a habitat for life. have confirmed that water persisted on Mars, and Since the 1960s, when humans began sending the that a Martian habitat for life is a possibility. While first tentative interplanetary probes out into the solar they continue their studies, what lies ahead are system, two-thirds of all missions to Mars have NASA missions that not only “follow the water” on failed. The technical challenges are tremendous: Mars, but also “follow the carbon,” a building block building robots that can withstand the tremendous of life. In the next decade, precision landers and shaking of launch; six months in the deep cold of rovers may even search for evidence of life itself, space; a hurtling descent through the atmosphere either signs of past microbial life in the rock record (going from 10,000 miles per hour to 0 in only six or signs of past or present life where reserves of minutes!); bouncing as high as a three-story building water ice lie beneath the Martian surface today. -

Exploration of Victoria Crater by the Mars Rover Opportunity
Exploration of Victoria Crater by the Mars Rover Opportunity The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Squyres, Steven W., Andrew H. Knoll, Raymond E. Arvidson, James W. Ashley, James F. III Bell, Wendy M. Calvin, Philip R. Christensen, et al. 2009. Exploration of Victoria Crater by the Mars rover Opportunity. Science 324(5930): 1058-1061. Published Version doi:10.1126/science.1170355 Citable link http://nrs.harvard.edu/urn-3:HUL.InstRepos:3934552 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Open Access Policy Articles, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#OAP Exploration of Victoria Crater by the Rover Opportunity S.W. Squyres1, A.H. Knoll2, R.E. Arvidson3, J.W. Ashley4, J.F. Bell III1, W.M. Calvin5, P.R. Christensen4, B.C. Clark6, B.A. Cohen7, P.A. de Souza Jr.8, L. Edgar9, W.H. Farrand10, I. Fleischer11, R. Gellert12, M.P. Golombek13, J. Grant14, J. Grotzinger9, A. Hayes9, K.E. Herkenhoff15, J.R. Johnson15, B. Jolliff3, G. Klingelhöfer11, A. Knudson4, R. Li16, T.J. McCoy17, S.M. McLennan18, D.W. Ming19, D.W. Mittlefehldt19, R.V. Morris19, J.W. Rice Jr.4, C. Schröder11, R.J. Sullivan1, A. Yen13, R.A. Yingst20 1 Dept. of Astronomy, Space Sciences Bldg., Cornell University, Ithaca, NY 14853, USA 2 Botanical Museum, Harvard University, Cambridge MA 02138, USA 3 Dept. -

Mars Reconnaissance Orbiter and Opportunity Observations Of
PUBLICATIONS Journal of Geophysical Research: Planets RESEARCH ARTICLE Mars Reconnaissance Orbiter and Opportunity 10.1002/2014JE004686 observations of the Burns formation: Crater Key Point: hopping at Meridiani Planum • Hydrated Mg and Ca sulfate Burns formation minerals mapped with MRO R. E. Arvidson1, J. F. Bell III2, J. G. Catalano1, B. C. Clark3, V. K. Fox1, R. Gellert4, J. P. Grotzinger5, and MER data E. A. Guinness1, K. E. Herkenhoff6, A. H. Knoll7, M. G. A. Lapotre5, S. M. McLennan8, D. W. Ming9, R. V. Morris9, S. L. Murchie10, K. E. Powell1, M. D. Smith11, S. W. Squyres12, M. J. Wolff3, and J. J. Wray13 1 2 Correspondence to: Department of Earth and Planetary Sciences, Washington University in Saint Louis, Missouri, USA, School of Earth and Space R. E. Arvidson, Exploration, Arizona State University, Tempe, Arizona, USA, 3Space Science Institute, Boulder, Colorado, USA, 4Department of [email protected] Physics, University of Guelph, Guelph, Ontario, Canada, 5Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, California, USA, 6U.S. Geological Survey, Astrogeology Science Center, Flagstaff, Arizona, USA, 7 8 Citation: Department of Organismic and Evolutionary Biology, Harvard University, Cambridge, Massachusetts, USA, Department Arvidson, R. E., et al. (2015), Mars of Geosciences, Stony Brook University, Stony Brook, New York, USA, 9NASA Johnson Space Center, Houston, Texas, USA, Reconnaissance Orbiter and Opportunity 10Applied Physics Laboratory, Johns Hopkins University, Laurel, Maryland, USA, 11NASA Goddard Space Flight Center, observations of the Burns formation: Greenbelt, Maryland, USA, 12Department of Astronomy, Cornell University, Ithaca, New York, USA, 13School of Earth and Crater hopping at Meridiani Planum, J. -

LAYERED SULFATE-BEARING TERRAINS on MARS: INSIGHTS from GALE CRATER and MERIDIANI PLANUM. K.E. Powell1,2, R.E. Arvidson3, and C.S
Ninth International Conference on Mars 2019 (LPI Contrib. No. 2089) 6316.pdf LAYERED SULFATE-BEARING TERRAINS ON MARS: INSIGHTS FROM GALE CRATER AND MERIDIANI PLANUM. K.E. Powell1,2, R.E. Arvidson3, and C.S. Edwards1, 1Department of Physics & Astrono- my, Northern Arizona University, 2School of Earth & Space Exploration, Arizona State University, 3Department of Earth & Planetary Sciences, Washington University in St. Louis. Introduction: Sulfate species have been detected ronment, with episodes of diagenesis and weathering in late Noachian and Hesperian terrains on Mars lying to form a crystalline hematite lag deposit [4, 5]. The stratigraphically above clay minerals, which has been lag deposit masks the CRISM spectral signature of interpreted as documenting a shift from wetter to more sulfate in most locations. Sulfate minerals including arid environments on the surface. Sulfate detections kieserite and gypsum have been detected in impact are associated with layered deposits in numerous loca- crater walls and windswept regions [6]. The Oppor- tions including Gale Crater, Meridiani Planum, Vallis tunity rover explored southern Meridiani Planum Marineris, and Terra Sirenum, and Aram Chaos [1]. through a campaign of crater-hopping, using craters as These sulfates and clays been identified using their a natural drill to expose strata [6]. The deepest expo- diagnostic absorption features in visible and near- sures explored by Opportunity directly are ~10 meters infrared reflectance (VNIR) data acquired from Mars thick at Victoria Crater. Opportunity results indicate orbit. Additionally, two rover missions have explored that the top layers of Burns formation contain up to sites with massive sulfate deposits. The first, the MER 40% sulfate and included Mg, Ca, and Fe species. -

Testable Hypotheses for Opportunity's Traverse
42nd Lunar and Planetary Science Conference (2011) 2199.pdf TESTABLE HYPOTHESES FOR OPPORTUNITY’S TRAVERSE FROM SANTA MARIA TO THE RIM OF ENDEAVOUR CRATER. A. A. Fraeman1, R. E. Arvidson1, S. L. Murchie2, F. P. Seelos2, and J. A. McGo- vern2, 1Washington University in St. Louis, Dept. of Earth and Planetary Science, St. Louis, MO (afrae- [email protected]), 2Johns Hopkins University Applied Physics Laboratory, Laurel, MD Introduction: As of January 2011, the Mars rover Botany Bay and the southern tip of Cape York: Opportunity was located at Santa Maria crater, ~6 km In contrast to the plains, CRISM normal [1] and over- away from the closest rim segment of the ~20 km di- sampled FRT data show signatures of hydrated phases, ameter Noachian-aged impact crater Endeavour (Fig. including hydrated sulfates, present throughout Botany 1). Endeavour predates the sedimentary rocks ex- Bay and the southern point of Cape York (Fig. 3). amined by Opportunity for the past 7 years, and Com- These phases have not been detected from orbit at any pact Reconnaissance Imaging Spectrometer for Mars other location along Opportunity’s ~26km traverse (CRISM) data indicate that Fe-Mg smectites are (with the exception of a small group of CRISM pixels present on the rim of this highly degraded crater [1]. on the SE rim of Santa Maria crater [3]), and suggests The purpose of this abstract is to present working a change in mineralogy occurs, probably at a strati- hypotheses to help guide the acquisition and analysis of graphic contact within Botany Bay. Opportunity’s continued Mars Reconnaissance Orbiter (MRO) cover- ground-truth observations will be essential in determin- age and Opportunity observations as the rover departs ing the nature of these phases as the rover approaches Santa Maria, traverses across the plains, and ascends Cape York, the closest rim segment. -

GRAIL Reveals Secrets of the Lunar Interior
GRAIL Reveals Secrets of the Lunar Interior — Dr. Patrick J. McGovern, Lunar and Planetary Institute A mini-flotilla of spacecraft sent to the Moon in the past few years by several nations has revealed much about the characteristics of the lunar surface via techniques such as imaging, spectroscopy, and laser ranging. While the achievements of these missions have been impressive, only GRAIL has seen deeply enough to reveal inner secrets that the Moon holds. LRecent Lunar Missions Country Name Launch Date Status ESA Small Missions for Advanced September 27, 2003 Ended with lunar surface impact on Research in Technology-1 (SMART-1) September 3, 2006 USA Acceleration, Reconnection, February 27, 2007 Extension of the THEMIS mission; ended Turbulence and Electrodynamics of in 2012 the Moon’s Interaction with the Sun (ARTEMIS) Japan SELENE (Kaguya) September 14, 2007 Ended with lunar surface impact on June 10, 2009 PChina Chang’e-1 October 24, 2007 Taken out of orbit on March 1, 2009 India Chandrayaan-1 October 22, 2008 Two-year mission; ended after 315 days due to malfunction and loss of contact USA Lunar Reconnaissance Orbiter (LRO) June 18, 2009 Completed one-year primary mission; now in five-year extended mission USA Lunar Crater Observation and June 18, 2009 Ended with lunar surface impact on Sensing Satellite (LCROSS) October 9, 2009 China Chang’e-2 October 1, 2010 Primary mission lasted for six months; extended mission completed flyby of asteroid 4179 Toutatis in December 2012 USA Gravity Recovery and Interior September 10, 2011 Ended with lunar surface impact on I Laboratory (GRAIL) December 17, 2012 To probe deeper, NASA launched the Gravity Recovery and Interior Laboratory (GRAIL) mission: twin spacecraft (named “Ebb” and “Flow” by elementary school students from Montana) flying in formation over the lunar surface, tracking each other to within a sensitivity of 50 nanometers per second, or one- twenty-thousandth of the velocity that a snail moves [1], according to GRAIL Principal Investigator Maria Zuber of the Massachusetts Institute of Technology. -

Terrestrial Planets 1- 4 from the Sun Mercury in Sight
Terrestrial Planets 1- 4 from the Sun Image courtesy: http://commons.wikimedia.org/wiki/Image:Terrestrial_planet_size_comparisons_edit.jpg First ever ‘whole Earth’ picture from deep space, taken by Bill Anders on Apollo 8 Apollo 8 crew, Bill Anders centre: courtesy Nasa Mercury, Venus, Earth and Mars are four The Earth is just a planet astonishingly different planets Mercury and Venus have only been seen in any detail within the last 30 years Mercury in sight Mercury Mercury is like the Earth inside and the Moon outside Courtesy NASA (Mariner 10) Mercury has had a cooling and bombardment history Mercury is visible only soon after the setting similar to the moon sun or shortly before dawn It appears as cratered lava the Mariner 10 probe (1974/75) is the source of most information about Mercury – Messenger, launched 2004, with scarps first flypast in 2008 and orbit Mercury in 2011. ESA’s Its rocks are Earth-like BepiColombo, to be launched in 2013 Mariner 10 image Messenger images Messenger image ↑ Double-ringed crater – a Mercury feature courtesy: http://messenger.jhuapl.edu/gallery/sciencePhotos/pics/S trom02.jpg ← Courtesy: http://messenger.jhuapl.edu/gal lery/sciencePhotos/pics/EN010 8828161M.jpg Courtesy: http://messenger.jhuapl.edu/gallery/sciencePhotos/pics/Prockter06.jpg Messenger image Mercury Close-up Mercury’s topography was formed under stronger The gravity than on the Moon caloris The Caloris basin is an impact crater ~1400 km across, basin is the beneath which is thought to be a dense mass large 2 Mercury’s rotation period is exactly /3 of its orbital circular period of 87.97 days. -

FIELD STUDIES of CRATER GRADATION in GUSEV CRATER and MERIDIANI PLANUM USING the MARS EXPLORATION ROVERS. J. A. Grant1, M. P. Golombek2, A
Role of Volatiles and Atmospheres on Martian Impact Craters 2005 3004.pdf FIELD STUDIES OF CRATER GRADATION IN GUSEV CRATER AND MERIDIANI PLANUM USING THE MARS EXPLORATION ROVERS. J. A. Grant1, M. P. Golombek2, A. F. C. Haldemann2, L. Crumpler3, R. Li4, W. A. Watters5, and the Athena Science Team 1Center for Earth and Planetary Studies, National Air and Space Museum, Smithsonian Institution, Washington, DC 20560, 2Jet Propulsion Laboratory, California Institute of Tech- nology, Pasadena, CA 91109, 3New Mexico Museum of Natural History and Science, Albuquerque, NM 87104, 4Department of Civil Engineering and Remote Sensing, The Ohio State University, Columbus, OH 43210, 5Department of Earth, Atmospheric, and Planetary Sciences, Massachusetts Institute of Technology, Cambridge, MA 02139. Introduction: The Mars Exploration Rovers Spirit Impact Structures in Meridiani Planum: Craters and Opportunity investigated numerous craters since explored at Meridiani are fewer and farther between landing in Gusev crater (14.569oS, 175.473oE) and than at Gusev and all are formed into sulfate bedrock Meridiani Planum (1.946oS, 354.473oE) over the first [3]. With the exception of the most degraded examples, 400 sols of their missions [1-4]. Craters at both sites Meridiani craters have depth-to-diameter ratios >0.10 are simple structures and vary in size and preservation and preserve walls sloped generally >10 degrees. En- state. Comparing observed and expected pristine mor- durance crater is 150 m-in-diameter, 22 m deep, and phology and using process-specific gradational signa- possesses walls sloped between 15-30 degrees, but tures around terrestrial craters as a template [5-7] al- locally exceeding the repose angle (Table 1). -

14Yearsofdiscovery
14 YEARS OF DISCOVERIES 14 years of discoveries 14 YEARS OF DISCOVERIES DesignedMARS to last 90 days, Opportunity survived for over a 1 Martian solar decade on Mars. Here day (Sol) we look back on how = the record-breaking 1.027 rover changed the way Earth days we see the Red Planet 2 14 years of discoveries 39 Sols 91 Sols Opportunity’s Opportunity from orbit Opportunity’s journey across Mars has objectives been closely watched and calibrated by the satellites in orbit around the Red Search for signs of past Planet. This image from NASA’s Mars ✔ Global Surveyor shows some of the liquid water tracks of the rover, the craters it was visiting, its back shell and parachute, Determine distribution along with the location of its discarded and composition of heat shield. It was taken on 26 April Martian rocks ✔ 2004 on Sol 91 from a distance of around 400 kilometres (249 miles). Discover the geological processes which formed the Martian terrain ✔ Validate measurements made by probes orbiting Mars ✔ Search for iron containing minerals that may have been formed in water ✔ Signs of past water This is a microscopic image of part of a rock called 'Last Determine the texture of Chance'. The view here is around five centimetres (two rocks and soils and what inches) across and was taken on Opportunity’s 39th created them ✔ Martian day. The texture of the rock has led scientists to believe that water was once present in the area in which Assess whether Mars’ climate it was found – the Meridiani Planum area of Mars, which was ever fit for life ✔ is close to its equator. -
2011-2 Sidereal-Times
The Official Publication of the Amateur Astronomers Association of Princeton Director Treasurer Program Chairman Ludy D’Angelo Michael Mitrano John Church 609-882-9336 (609)-737-6518 (609) 799-0723 [email protected] [email protected] [email protected] Assistant Director Secretary Editors Jeff Bernardis Larry Kane Bryan Hubbard, Ira Pollans and Michael Wright (609) 466-4238 (609) 273-1456 (908) 859-1670 and (609) 371-5668 [email protected] [email protected] [email protected] Also online at princetonastronomy.wordpress.com Volume 40 February 2011 Number 2 From the Director again starting in April. We’ll be doing some equip- ment upgrading from another generous donation to Snow! And more snow! And very cold! I used to the club. Also, there will be Super Science day at the State Planetarium coming up soon. never mind it, but this year it’s bugging me. It’s stopping or delaying many things. Our last meet- ing cancelled (a rarity!), very cold observing Also, we will soon be looking for another round of nights, very cold Outreach nights. But you know nominations for the next Board of Trustees of the club. This needs to be done by the May meeting. We what’s coming? SPRING! March and April bring need a volunteer to lead a nomination committee by chances at Messier Marathons. Maybe we could do one, maybe it won’t snow, or rain, or sleet, or our March meeting. We will be taking nominations hail. Who am I kidding, this is New Jersey, and for Director, Assistant Director, Program Chair, Sec- retary, and Treasurer.