Collision Dynamics Modeling of Crash Energy Management Passenger Rail Equipment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

4. Rail Capacity
69719 Public Disclosure Authorized Public Transport Capacity Analysis Procedures for Developing Cities Public Disclosure Authorized Public Disclosure Authorized Jack Reilly and Herbert Levinson September, 2011 World Bank, Transport Research Support Program, TRS Public Disclosure Authorized With Support from UK Department for International Development 1 The authors would like to acknowledge the contributions of a number of people in the development of this manual. Particular among these were Sam Zimmerman, consultant to the World Bank and Mr. Ajay Kumar, the World Bank project manager. We also benefitted greatly from the insights of Dario Hidalgo of EMBARQ. Further, we acknowledge the work of the staff of Transmilenio, S.A. in Bogota, especially Sandra Angel and Constanza Garcia for providing operating data for some of these analyses. A number of analyses in this manual were prepared by students from Rensselaer Polytechnic Institute. These include: Case study – Bogota Ivan Sanchez Case Study – Medellin Carlos Gonzalez-Calderon Simulation modeling Felipe Aros Vera Brian Maleck Michael Kukesh Sarah Ritter Platform evacuation Kevin Watral Sample problems Caitlynn Coppinger Vertical circulation Robyn Marquis Several procedures and tables in this report were adapted from the Transit Capacity and Quality of Service Manual, published by the Transportation Research Board, Washington, DC. Public Transport Analysis Procedures for Developing Cities 2 Contents Acknowledgements .................................................................................... -

MDTA Metromover Extensions Transfer Analysis Final Technical Memorandum 3, April 1994
Center for Urban Transportation Research METRO-DADE TRANSIT AGENCY MDTA Metromover Extensions Transfer Analysis FINAL Technical Memorandum Number 3 Analysis of Impacts of Proposed Transfers Between Bus and Mover CUllR University of South Florida College of Engineering (Cf~-~- METRO-DADE TRANSIT AGENCY MDTA Metromover Extensions Transfer Analysis FINAL Technical Memorandum Number 3 Analysis of Impacts of Proposed Transfers Between Bus and Mover Prepared for Metro-Dade.. Transit Agency lft M E T R 0 D A D E 1 'I'··.·-.·.· ... .· ','··-,·.~ ... • R,,,.""' . ,~'.'~:; ·.... :.:~·-·· ,.,.,.,_, ,"\i :··-·· ".1 •... ,:~.: .. ::;·~·~·;;·'-_i; ·•· s· .,,.· - I ·1· Prepared by Center for Urban Transportation Research College of Engineering University of South Florida Tampa, Florida CUTR APRIL 1994 TECHNICAL MEMORANDUM NUMBER 3 Analysis of Impacts of Proposed Transfers between Bus and Mover Technical Memorandum Number 3 analyzes the impacts of the proposed transfers between Metrobus and the new legs of the Metromover scheduled to begin operation in late May 1994. Impacts on passengers walk distance from mover stations versus current bus stops, and station capacity will also be examined. STATION CAPACITY The following sections briefly describe the bus terminal/transfer locations for the Omni and Brickell Metromover Stations. Bus to mover transfers and bus route service levels are presented for each of the two Metromover stations. Figure 1 presents the Traffic Analysis Zones (TAZ) in the CBD, as well as a graphical representation of the Metromover alignment. Omni Station The Omni bus terminal adjacent to the Omni Metromover Station is scheduled to open along with the opening of the Metromover extensions in late May 1994. The Omni bus terminal/Metromover Station is bounded by Biscayne Boulevard, 14th Terrace, Bayshore Drive, and NE 15th Street. -

The Commercial & Technical Evolution of the Ferry
THE COMMERCIAL & TECHNICAL EVOLUTION OF THE FERRY INDUSTRY 1948-1987 By William (Bill) Moses M.B.E. A thesis presented to the University of Greenwich in fulfilment of the thesis requirement for the degree of Doctor of Philosophy October 2010 DECLARATION “I certify that this work has not been accepted in substance for any degree, and is not concurrently being submitted for any degree other than that of Doctor of Philosophy being studied at the University of Greenwich. I also declare that this work is the result of my own investigations except where otherwise identified by references and that I have not plagiarised another’s work”. ……………………………………………. William Trevor Moses Date: ………………………………. ……………………………………………… Professor Sarah Palmer Date: ………………………………. ……………………………………………… Professor Alastair Couper Date:……………………………. ii Acknowledgements There are a number of individuals that I am indebted to for their support and encouragement, but before mentioning some by name I would like to acknowledge and indeed dedicate this thesis to my late Mother and Father. Coming from a seafaring tradition it was perhaps no wonder that I would follow but not without hardship on the part of my parents as they struggled to raise the necessary funds for my books and officer cadet uniform. Their confidence and encouragement has since allowed me to achieve a great deal and I am only saddened by the fact that they are not here to share this latest and arguably most prestigious attainment. It is also appropriate to mention the ferry industry, made up on an intrepid band of individuals that I have been proud and privileged to work alongside for as many decades as covered by this thesis. -
Surface Access Integrated Ticketing Report May 2018 1
SURFACE ACCESS INTEGRATED TICKETING REPORT MAY 2018 1. Contents 1. Executive Summary 3 1.1. Introduction 3 1.2. Methodology 3 1.3. Current Practice 4 1.4. Appetite and Desire 5 1.5. Barriers 5 1.6. Conclusions 6 2. Introduction 7 3. Methodology 8 4. Current Practice 9 4.1. Current Practice within the Aviation Sector in the UK 11 4.2. Experience from Other Modes in the UK 15 4.3. International Comparisons 20 5. Appetite and Desire 25 5.1. Industry Appetite Findings 25 5.2. Passenger Appetite Findings 26 5.3. Passenger Appetite Summary 30 6. Barriers 31 6.1. Commercial 32 6.2. Technological 33 6.3. Regulatory 34 6.4. Awareness 35 6.5. Cultural/Behavioural 36 7. Conclusions 37 8. Appendix 1 – About the Authors 39 9. Appendix 2 – Bibliography 40 10. Appendix 3 – Distribution & Integration Methods 43 PAGE 2 1. Executive Summary 1.1. Introduction This report examines air-to-surface access integrated ticketing in support of one of the Department for Transport’s (DfT) six policy objectives in the proposed new avia- tion strategy – “Helping the aviation industry work for its customers”. Integrated Ticketing is defined as the incorporation of one ticket that includes sur- face access to/from an airport and the airplane ticket itself using one transaction. Integrated ticketing may consider surface access journeys both to the origin airport and from the destination airport. We recognise that some of the methods of inte- grated ticketing might not be truly integrated (such as selling rail or coach tickets on board the flight), but such examples were included in the report to reflect that these exist and that the customer experience in purchasing is relatively seamless. -
High Speed Rail
House of Commons Transport Committee High Speed Rail Tenth Report of Session 2010–12 Volume III Additional written evidence Ordered by the House of Commons to be published 24 May, 7, 14, 21 and 28 June, 12 July, 6, 7 and 13 September and 11 October 2011 Published on 8 November 2011 by authority of the House of Commons London: The Stationery Office Limited The Transport Committee The Transport Committee is appointed by the House of Commons to examine the expenditure, administration, and policy of the Department for Transport and its Associate Public Bodies. Current membership Mrs Louise Ellman (Labour/Co-operative, Liverpool Riverside) (Chair) Steve Baker (Conservative, Wycombe) Jim Dobbin (Labour/Co-operative, Heywood and Middleton) Mr Tom Harris (Labour, Glasgow South) Julie Hilling (Labour, Bolton West) Kwasi Kwarteng (Conservative, Spelthorne) Mr John Leech (Liberal Democrat, Manchester Withington) Paul Maynard (Conservative, Blackpool North and Cleveleys) Iain Stewart (Conservative, Milton Keynes South) Graham Stringer (Labour, Blackley and Broughton) Julian Sturdy (Conservative, York Outer) The following were also members of the committee during the Parliament. Angie Bray (Conservative, Ealing Central and Acton) Lilian Greenwood (Labour, Nottingham South) Kelvin Hopkins (Labour, Luton North) Gavin Shuker (Labour/Co-operative, Luton South) Angela Smith (Labour, Penistone and Stocksbridge) Powers The committee is one of the departmental select committees, the powers of which are set out in House of Commons Standing Orders, principally in SO No 152. These are available on the internet via www.parliament.uk. Publication The Reports and evidence of the Committee are published by The Stationery Office by Order of the House. -

Transit Capacity and Quality of Service Manual (Part B)
7UDQVLW&DSDFLW\DQG4XDOLW\RI6HUYLFH0DQXDO PART 2 BUS TRANSIT CAPACITY CONTENTS 1. BUS CAPACITY BASICS ....................................................................................... 2-1 Overview..................................................................................................................... 2-1 Definitions............................................................................................................... 2-1 Types of Bus Facilities and Service ............................................................................ 2-3 Factors Influencing Bus Capacity ............................................................................... 2-5 Vehicle Capacity..................................................................................................... 2-5 Person Capacity..................................................................................................... 2-13 Fundamental Capacity Calculations .......................................................................... 2-15 Vehicle Capacity................................................................................................... 2-15 Person Capacity..................................................................................................... 2-22 Planning Applications ............................................................................................... 2-23 2. OPERATING ISSUES............................................................................................ 2-25 Introduction.............................................................................................................. -

Load Quantification of the Wheel–Rail Interface of Rail Vehicles for The
Original Article Proc IMechE Part F: J Rail and Rapid Transit 0(0) 1–10 Load quantification of the wheel–rail ! IMechE 2016 Reprints and permissions: interface of rail vehicles for the sagepub.co.uk/journalsPermissions.nav DOI: 10.1177/0954409716684266 infrastructure of light rail, heavy rail, journals.sagepub.com/home/pif and commuter rail transit Xiao Lin, J Riley Edwards, Marcus S Dersch, Thomas A Roadcap and Conrad Ruppert Jr Abstract The type and magnitude of loads that pass through the track superstructure have a great impact on both the design and the performance of the concrete crossties and fastening systems. To date, the majority of North American research that focus on quantifying the rail infrastructure loading conditions has been conducted on heavy-haul freight railroads. However, the results and recommendations of these studies may not be applicable to the rail transit industry due to a variety of factors. Unlike the freight railroads, which have standardized maximum gross rail loads and superstructure design practices for vehicles, the rail transit industry is home to a significant variety of vehicle and infrastructure designs. Some of the current transit infrastructure design practices, which were established decades ago, need to be updated with respect to the current loading environment, infrastructure types, and understanding of the component and system-level behavior. This study focuses on quantifying the current load environment for light rail, heavy rail, and commuter rail transit infrastructure in the United States. As an initial phase of this study, researchers at the University of Illinois at Urbana-Champaign (UIUC) have conducted a literature review of different metrics, which is used to evaluate the static, dynamic, impact, and rail seat loads for the rail transit infrastructure. -

M-7 Long Island Railroad .Montreal EMU .Gallery Car Electric Multiple Unit -M- ~ New York, Usj
APPENDIX 6 . M-7 Long Island Railroad .Montreal EMU .Gallery Car Electric Multiple Unit -M- ~ New York, Usj Under joint agreement to the Metropolitan Transportation Authority / Long Island Rail Road (LIRR) and the Metro-North Railroad (MNR), Bombardier Transportation is providing Electric Multiple Unit (EMU) M- 7 commuter cars to LIRR to begin replacement of its Metropolitan M-I commuter car fleet. Chartered in 1834, the Long The units are equipped with The interior of the LIRR' Island Rail Road is the largest Bombardier's renowned stainless "Car of the Future" was designel Commuter Rail system in North steel carbodies for long life and with the input of the passenger America. low maintenance, and asynchro- and employees and includes a] nous AC motors featuring state- ADA compliant toilet, cellula Bombardier's new Electric of-the-art IGBT {isolated gate bipo- telephone and wide, single-lea Multiple Units, its first railcar lar transistors) inverters. Use of sliding doors for ease of entry an contract for the LIRR, will service outboard-bearing bolsterless fab- exit. the Long Island commuter lines, ricated bogies offers considerable constituting 80% of the system. weight savings over cast bogies. ~ BOMBARDIER BOMBARD" TRANSPORTATION 'V Electric Multiple Unit -M- 7 POWERCAR WITH TOILET ---10' 6' B END FEND I 3,200 mi , -: -" 0 C==- ~=0 :- CJCJ ~~[] CJCJCJCJCJCJ [] I D b 01 " ~) -1::1 1211-1/2 t~J ~~W ~~IL...I ~w -A'-'1~~~- I ~~ 309~mmt ~ 1 I~ 11 m 2205~16~m-! 591..1.6" mm --I I 1- -- 59°6" ° 4°8-1/2. , ~ 16,~:,60~m ~-- -;cl 10435mm ~ .-1 -

COMPREHENSIVE SYSTEM ANALYSIS | Volume II: Service Plan City of Minot
COMPREHENSIVE SYSTEM ANALYSIS | Volume II: Service Plan City of Minot City of Minot COMPREHENSIVE SYSTEM ANALYSIS Volume II: Service Plan December 2013 Nelson\Nygaard Consulting Associates Inc. | i COMPREHENSIVE SYSTEM ANALYSIS | Volume II: Service Plan City of Minot Table of Contents Page 1 Introduction ......................................................................................................................1-1 Community Outreach ............................................................................................................................. 1-2 2 Vision, Goals, and Transit Planning Principles ................................................................2-1 Vision for Transit in Minot ..................................................................................................................... 2-1 Elements of the Complete Transit System .................................................................................... 2-3 Service Allocation and Design Principles .......................................................................................... 2-7 Service Allocation Goals................................................................................................................. 2-7 Service Design Guidelines .............................................................................................................. 2-9 3 Short-Term Service Plan ...................................................................................................3-1 Route Descriptions ................................................................................................................................. -
A Quick Guide to the Railways
BRIEFING PAPER Number CBP 4128, 4 December 2018 A Quick Guide to the By Louise Butcher Railways Contents: 1. How do the railways work? 2. Funding 3. Train operating companies (TOCs) 4. Performance, reliability and default 5. Passenger rights and complaints 6. Compensation 7. Infrastructure: Network Rail 8. Rolling stock 9. Regulation 10. Fares 11. Station funding 12. Freight 13. Community Rail www.parliament.uk/commons-library | intranet.parliament.uk/commons-library | [email protected] | @commonslibrary 2 A Quick Guide to the Railways Contents Summary 3 1. How do the railways work? 4 2. Funding 6 3. Train operating companies (TOCs) 7 3.1 Franchises 7 3.2 Concession agreements 9 3.3 Open access 9 4. Performance, reliability and default 11 5. Passenger rights and complaints 12 6. Compensation 13 7. Infrastructure: Network Rail 14 8. Rolling stock 15 9. Regulation 16 10. Fares 17 11. Station funding 18 12. Freight 20 13. Community Rail 21 Cover page image copyright Crowds at Waterloo Station by Matthew Black. Licensed under CC BY 2.0 / image cropped. 3 Commons Library Briefing, 4 December 2018 Summary This paper provides a brief outline of the GB rail industry, including the bodies responsible for delivering services, how new schemes are chosen and financed. Following privatisation in 1993, British Rail was divided into two main parts: one part being the national rail infrastructure (track, signalling, bridges, tunnels, stations and depots) and the second being the operating companies whose trains run on that network. The infrastructure is owned by Network Rail which is regulated by the Office of Rail and Road (ORR). -

File 4 P. 48 • My Super Dense Crush Load Commute Every Morning I
File 4 p. 48 • My Super Dense Crush Load Commute Every morning I start the day by squeezing into a train that is ‘super dense crush loaded’. These local trains carry more than twice the number of passengers than their capacity, which means I am crushed and sandwiched between at least eight other women from all sides1, hugging me from head to toe. […] There were times during my college days when I was almost hanging on the footboard2 of my train, trying to get myself inside the heavily loaded compartment. I would scream to the highest of my voice asking the women ahead to keep moving in to allow me and other women hanging outside to get inside the compartment. We don’t have any concept of doors closing before the train starts moving away from the station. This is what is really shocking about the world’s busiest railway lines here. […] Another amazing aspect of travelling on the local trains is that people have to board trains even before they halt at the station. I usually time my jump, leap inside the compartment holding the door handles, or even another commuter’s arm, then grab a seat before anyone else. Once this is done it is a feeling of great accomplishment! Kinjal Pandya-Wagh, bbc.co.uk, August 2016 1. Mumbai’s suburban trains have ladies’ carriages. 2. marchepied File 4 p. 49 • Chai Chai India can have no better symbol for national integration than the railways. The railway reservation form doesn’t ask you anything beyond your name, age, gender and address. -
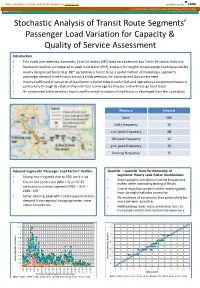
Stochastic Analysis of Transit Route Segments' Passenger Load
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Queensland University of Technology ePrints Archive Stochastic Analysis of Transit Route Segments’ Passenger Load Variation for Capacity & Quality of Service Assessment Introduction • This study uses weekday Automatic Fare Collection (AFC) data on a premium bus line in Brisbane, Australia • Stochastic analysis is compared to peak hour factor (PHF) analysis for insight into passenger loading variability • Hourly design load factor (e.g. 88th percentile) is found to be a useful method of modeling a segment’s passenger demand time-history across a study weekday, for capacity and QoS assessment • Hourly coefficient of variation of load factor is found to be a useful QoS and operational assessment measure, particularly through its relationship with hourly average load factor, and with design load factor • An assessment table based on hourly coefficient of variation of load factor is developed from the case study Measure Inbound Span 18h Early frequency 15 a.m. peak frequency 10 Off-peak frequency 15 p.m. peak frequency 15 Evening frequency 15 Inbound Segments’ Passenger Load Factors’ Profiles Quantile – Quantile Tests for Normality of Segments’ Hourly Load Factor Distributions • Strong morning peak due to CBD work trips • Small sample sizes due to limited frequencies • Crush load conditions (MSL > 1) on 07:25 makes other normality testing difficult service across inner segments MSD – SCH – • Line of equality comparison for morning peak COM - INT hour