IFAC MECHATRONICS & NOLCOS 2019 Conference Booklet
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1957 Dbl Jaargang 6
HET GESLACHT LIPS UIT BAVEL Gedurende minsten halvn ee s e eeuw hebben sommig- ge e nealogen getrach oplossinn ee t e vindengt bakermae d m o , e t t achterhale deznvan e familie haadie , r naa ontleenmwel dzal middeleeuwsn hebbeee n naa e stamvader e voornaad e di , m Lubbrecht Liebrecht— ( ) voerde drie d t feitet overgeHe .da , - bleven grafstenen van Bavel, die een wapen vertonen, alle op deze familie betrekking hebben, wijst er op, dat zij destijds tot de notabele e plaatdi n s nva moet hebbek n oo behoord t za j Zi . vanaf de XVe tot de XVII eeuw regelmatig in de schepenbank van Ginneke Baveln ne hunnern Ee . , Jacob Janszn. Lips, sche- pen (1526—1543), voerde blijkens zijn zegel, hangende aan een charter van 13-7-1535 : twee in elkaar geschoven open driehoe- t ' harn klei n ee i (croin t nt ke Davie vierblaxd me , d?) f o d kruisje, alles in de vorm van een zespuntige ster. Maar een Laurens Lips, ontvange e Eindhovet r e XVIIId n i n e eeuw, bezigde het Hollandse wapen Lips (met de dwarsbalk en de koeken) in zijn cachet (medegedeeld door de Heer A. R. Kleyn e Zeist)t j hebbeWi . n than e genealogid s e kunnen opvoeren tot Rombout Lips, geb. omstr zoon . ee 1390ne haddi ,Lipsn :Ja , geb. omstr. 1420, wonende „opden Leeghen Eyckbergh" te Ba- vel. Waarui voo— t r zove j bekenmi r vied— r kinderen sproten: 1. Rombotit Janszn. Lips, schepen van Ginneken en Bavel (1512) . Lysbeth2 ; n RomboutJa Lips, . -
The Creation of a Secular Inquisition in Early Modern Brabant
Orthodoxy and Opposition: The Creation of a Secular Inquisition in Early Modern Brabant Item Type text; Electronic Dissertation Authors Christman, Victoria Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction or presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 10/10/2021 08:36:02 Link to Item http://hdl.handle.net/10150/195502 ORTHODOXY AND OPPOSITION: THE CREATION OF A SECULAR INQUISITION IN EARLY MODERN BRABANT by Victoria Christman _______________________ Copyright © Victoria Christman 2005 A Dissertation Submitted to the Faculty of the DEPARTMENT OF HISTORY In Partial Fulfillment of the Requirements For the Degree of DOCTOR OF PHILOSOPHY In the Graduate College THE UNIVERSITY OF ARIZONA 2 0 0 5 2 THE UNIVERSITY OF ARIZONA GRADUATE COLLEGE As members of the Dissertation Committee, we certify that we have read the dissertation prepared by Victoria Christman entitled: Orthodoxy and Opposition: The Creation of a Secular Inquisition in Early Modern Brabant and recommend that it be accepted as fulfilling the dissertation requirement for the Degree of Doctor of Philosophy Professor Susan C. Karant Nunn Date: 17 August 2005 Professor Alan E. Bernstein Date: 17 August 2005 Professor Helen Nader Date: 17 August 2005 Final approval and acceptance of this dissertation is contingent upon the candidate’s submission of the final copies of the dissertation to the Graduate College. I hereby certify that I have read this dissertation prepared under my direction and recommend that it be accepted as fulfilling the dissertation requirement. -

M&T Bank, NMLS ID # 381076 Authorized Mortgage Originators Last Name First Name NMLS ID # Registration Expires Aaron Samanth
M&T Bank, NMLS ID # 381076 Authorized Mortgage Originators Last Name First Name NMLS ID # Registration Expires Aaron Samantha 722898 12/31/2020 Abalo Ann 475257 12/31/2020 Abando Billy Jonathan 480656 12/31/2020 Abarno Sharon 432098 12/31/2020 Abass-Awodeyi Derin 491366 12/31/2020 Abbas Anam 1453096 12/31/2020 Abou Slaiby Jessica 1846949 12/31/2020 Abuzov Mikhail 1486752 12/31/2020 Acevedo Christine 1424044 12/31/2020 ACEVEDO IVETTE 1894486 12/31/2020 Ackerman Kimberly 468424 12/31/2020 Ackiam Balwantee 491241 12/31/2020 Acosta Gina 1763001 12/31/2020 Adamczyk Alicia 1422866 12/31/2020 Adamczyk Shannon 491483 12/31/2020 Adamo James 624505 12/31/2020 Adams Charla 1188316 12/31/2020 Adams Ibrahim 825308 12/31/2020 Adams Lisa 1453226 12/31/2020 Adams Sara 467574 12/31/2020 Addison Brittany 1402472 12/31/2020 Adhikari Bishnu 1739862 12/31/2020 Adsit Mary 474867 12/31/2020 Afolabi Akinlolu 1806799 12/31/2020 Afshar Maryam 474958 12/31/2020 Agbo Christiana 1886331 12/31/2020 Agendia Xavia 1945073 12/31/2020 Agida Augustine 1965839 12/31/2020 Ahearn Jennifer 468316 12/31/2020 Ahmad Imtiyaz 1916484 12/31/2020 Ahmad Samah 1545727 12/31/2020 Ahmad Shakeel 467774 12/31/2020 Ahmed Anum 1865046 12/31/2020 Ahmed Shahbaz 567154 12/31/2020 AHOEY PARIVASH 1926103 12/31/2020 Akbarzadeh Hosai 942669 12/31/2020 Akchurin Lisa 1856180 12/31/2020 Akhtar Fatima 1599631 12/31/2020 Akinkuowo Olutoyin 1138506 12/31/2020 Albano Hallie 1721464 12/31/2020 Albano Nancy 467244 12/31/2020 Alberici Jennifer 1958607 12/31/2020 Albert Michelle 1419752 12/31/2020 Albert -

The PHILIP KARNS, SR. Families
The PHILIP KARNS, SR. Families and PETER MEARKLE Families Including Allied Families of Virginia and Pennsylvania [Including those coming from Germany and moving to many parts of the USA] Researched and Compiled by Jean Karns Ladd <2013> Forrest E. Ladd, Jr. - Pictures/Graphics FTWDATA_2008_11 thb_Book_Karns_Mearkle_2012.ftw The PHILIP KARNS, SR. and PETER MEARKLE Families including Allied Families of Virginia and Pennsylvania Copyright 2013 All rights reserved. COPY PERMISSION PRIVATIZATION OF LIVING PERSONS IS REQUIRED FOR PROTECTION EXCEPTIONS: Descendants of PHILIP KARNS, Sr., or PETER MEARKLE or Others in this Database ..... for Family Sharing ONLY * * * * * * * PERMISSION IS NOT GIVEN FOR ANY LIVING PERSONS TO BE PUBLISHED, COPIED OR PLACED ON ANY ELECTRONIC MEDIA, INCLUDING WEBPAGES. [FTWDATA KARNS_NEW V. 7 and V. 11, 2011] [thb-Book_Karns_Mearkle_2012.FTW] * * * * * * * Ph: 405-350-8670 E-Mail: [email protected] The PHILIP KARNS, SR. and PETER MEARKLE Families including Allied Families of Virginia and Pennsylvania VOLUME 8 2257 Table of Contents HINTS TO HELP -- Important to Read! . .............................................. 11 A Family .....................................................................15 VOLUME 1 .................................................17 "MY SPECIAL LIST" ............................................................ 19 —FROM WHENCE THEY CAME—BADEN, GERMANY . 21 BADEN, GERMANY ............................................................. 23 BADENROOTS ............................................................... -

Of Walter Ellis Lansing*
THE FAMILY OF WALTER ELLIS LANSING [JllllllllllllllllllllllOUllllOUllllllTWIJIQIHQill[QIJ]llJUIQUU!!nzn· I THE }"AMILY OF WALTER ELLIS LANSING* PRfil'ACE Several genealogists have one Gerrit Frederiskse Lansing as the progenitor of the LansinP; Family in America. Among these have been Claude G. ~ unsell, "The Lansing Family", Jonathan Pearson, '"Geneal ogies of the First Settlers of Albany" (New York) and, S. V. Talcott, "New York and New England Families". In the New York r.enealogical and Biographical RECORD . Vol. 65 (1934), pages 56-58~ and Vol. 72 (1941) pages 26~28(a), contributions by William J. Hoffman, M.E., cites convincinP: research to the effect that the name of the progenitor was r.errit Gerritse (or Gerritze) Lansing and that he died in The Netherlands, probably in 16~3, and that his wife Elizabeth Hendrickse and her six children came to Ameri~a with her 2nd husband, Wouter Albertse (van den Uythoff) in the fall of 1655. This and other documents relatizu.r to this family are attached as background information. I am taking the position that (1) Gerrit Gerritse Lansing, a baker, was the father of the six children who came to America with their mother in 1655, (2) that Gerrit Gerritse Lansing died in The Netherlands and never came to America and \3) that Wouter Albertse van den Uythoff \baker), the 2nd husband, came with (or shortly before) the mother and six children (3 boys and 3 girls ) to America. Munsell states: "The Lansing family comprise one of America's oldest and most distinguished families. The family is closely associated with the found ing of the first European settlements in the valley of the Upper Hudson, a.t what is now Albany. -

De Nakomelingen Van Anthonis Jansz Van Dam
een genealogieonline publicatie De nakomelingen van Anthonis Jansz van Dam door Marjan van Dam 5 augustus 2021 De nakomelingen van Anthonis Jansz van Dam Marjan van Dam De nakomelingen van Anthonis Jansz van Dam Generatie 1 1. Anthonis Jansz van Dam, zoon van Jan van Dam, is geboren 1485 in Stolwijk(geb dt ntv). Hij is getrouwd 1480 in Stolwijk met Lijsbeth Vrouw. Zij kregen 1 kind: Pieter Antonisz van Dam, volg 2. Anthonis Jansz is overleden op 17 mei 1578 in Berkenwoude. Generatie 2 2. Pieter Antonisz van Dam, zoon van Anthonis Jansz van Dam en Lijsbeth Vrouw, is geboren 1497 in Stolwijk(geb dt ntv). Hij is getrouwd met Aeltge Jans. Zij kregen 1 kind: Willem Pietersz van Dam, volg 3. Pieter Antonisz is overleden op 17 mei 1578 in Berkenwoude. Generatie 3 3. Willem Pietersz van Dam, zoon van Pieter Antonisz van Dam en Aeltge Jans, is geboren 1535 in Berkenwoude(geb dt ntv). Hij is getrouwd 1560 met Marrigje Jansdr Dirck Geerlofsz. Zij kregen 1 kind: Jan Willemsz van Dam, volg 4. Willem Pietersz is overleden 1572 in Berkenwoude. Generatie 4 4. Jan Willemsz van Dam, zoon van Willem Pietersz van Dam en Marrigje Jansdr Dirck Geerlofsz, is geboren 1565 in Bovenkerk(geb dt ntv). Hij is getrouwd (2) 1587 in Stolwijk met Neeltje Claasdr Bleijnck. Zij kregen 1 kind: Claas Willem Jansz van Dam, volg 6. Jan Willemsz is overleden op 18 juni 1612. https://www.genealogieonline.nl/familiestamboom-van-dam/ 1 De nakomelingen van Anthonis Jansz van Dam Marjan van Dam Generatie 5 5. -
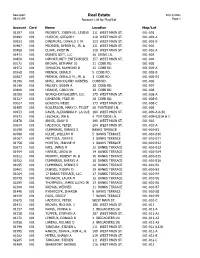
Real Estate 02/10/2021 08:53 AM Account List by Map/Lot Page 1
Searsport Real Estate 02/10/2021 08:53 AM Account List by Map/Lot Page 1 Account Card Name Location Map/Lot 01297 001 PROBERT, JOSEPH B., LIVING 111 WEST MAIN ST. 001-001 00491 001 HUSTON, GREGORY 119 WEST MAIN ST. 001-001-A 00623 001 DINSMORE, DONALD C JR 123 WEST MAIN ST. 001-001-B 00487 001 PROSSER, BYRON N., JR. & 131 WEST MAIN ST. 001-002 00488 001 CLARK, KRISTIN 129 WEST MAIN ST. 001-002-A 01471 001 IRENE'S GIFT, LLC 16 IRENE LN. 001-003 00850 001 OPPORTUNITY ENTERPRISES 157 WEST MAIN ST. 001-004 00172 001 BROWN, BETHANY JO 11 COBB RD. 001-005 01972 001 JOHNSON, RAYMOND D 15 COBB RD. 001-005-A 00568 001 FRENCH, GERALD 5 COBB RD. 001-005-B 00567 001 FRENCH, GERALD M., JR. & 3 COBB RD. 001-005-B1 01296 001 SMALL WOODLAND OWNERS COBB RD. 001-006 01149 001 MULREY, SUSAN A 38 COBB RD. 001-007 00400 001 HEARNE, CAROLYN 18 COBB RD. 001-008 01050 001 WORKSHOP/GALLERY, LLC 175 WEST MAIN ST. 001-008-A 01327 001 CAMERON, FRED JR 28 COBB RD. 001-008-B 00027 001 GORDON, HEIDI 173 WEST MAIN ST. 001-008-C 01405 001 ROLLERSON, MARY D. TRUST 20 PORTSIDE LN. 001-009 00933 001 DAVIS, ALEXANDRA P. LA RUE 164 WEST MAIN ST. 001-009-A & B1 00571 001 LELCHUK, IRA & 4 PORTSIDE LN. 001-009-B,B1A & C 00478 001 ANNIS, GARY O 190 WEST MAIN ST. 001-010 00674 001 HADDOCK, PETER 204 WEST MAIN ST. -

PORTUGAL E a QUESTÃO DOS BENS CULTURAIS DESLOCADOS DURANTE a II GUERRA MUNDIAL Conjunturas, Factos, Protagonistas E O Actual Estado Da Arte Volume I
UNIVERSIDADE DE LISBOA FACULDADE DE BELAS-ARTES PORTUGAL E A QUESTÃO DOS BENS CULTURAIS DESLOCADOS DURANTE A II GUERRA MUNDIAL Conjunturas, Factos, Protagonistas e o Actual Estado da Arte Volume I Iolanda Cristina Barreira Pereira Dissertação Mestrado em Museologia e Museografia 2014 UNIVERSIDADE DE LISBOA FACULDADE DE BELAS-ARTES PORTUGAL E A QUESTÃO DOS BENS CULTURAIS DESLOCADOS DURANTE A II GUERRA MUNDIAL Conjunturas, Factos, Protagonistas e o Actual Estado da Arte Volume I Iolanda Cristina Barreira Pereira Dissertação orientada pelo Prof(a). Doutor(a) Luísa Arruda Dissertação co-orientada pelo Prof(a). Doutor(a) Elsa Garrett Pinho Mestrado em Museologia e Museografia 2014 Aos meus pais, que me têm permitido, de todas as formas, percorrer este caminho. A ti, mãe. ii AGRADECIMENTOS Agradeço primeiramente às minhas orientadoras a Professora Doutora Luísa Arruda bem como à Professora Doutora Elsa Garrett Pinho, pelo seu incondicional apoio em todas as frentes deste trabalho, desde o seu traçado inicial, até à sua redação final. Um muito obrigada porque sem este amparo este trabalho teria sido impossível de concretizar. E, finalmente, a todos aqueles que individualmente ou em representação de entidades coletivas se disponibilizaram e colaboraram nas investigações que culminaram neste trabalho. Nomeadamente o Sr. Embaixador Manuel Côrte-Real, Drª. Anne Webber do Looted Art Commission, Carlos Guerreiro do blog Aterrem em Portugal, Tiago Gouveia do Museu do Caramulo, Maria Mayer da Casa-Museu Medeiros de Almeida, Inês Fialho Brandão, Professor Doutor Miguel Cabral Moncada e Luís Melo. iii ABREVIATURAS Alt. – altura Atrib. – atribuição C./ca. – cerca de Coord. Coordenação DL – Decreto-Lei Séc. – século Vol. -

Real Estate 08/17/2016 10:21 AM Account List by Map/Lot Page 1
Searsport Real Estate 08/17/2016 10:21 AM Account List by Map/Lot Page 1 Account Card Name Location Map/Lot 01297 001 PROBERT, JOSEPH B., LIVING 111 WEST MAIN ST. 001-001 00491 001 FEDERAL NATIONAL 119 WEST MAIN ST. 001-001-A 00623 001 DINSMORE, DONALD C., JR. & 123 WEST MAIN ST. 001-001-B 00487 001 PROSSER, BYRON N., JR. & 131 WEST MAIN ST. 001-002 00488 001 CLARK, KRISTIN & ADAM 129 WEST MAIN ST. 001-002-A 01471 001 IRENE'S GIFT, LLC 16 IRENE LN. 001-003 00850 001 KIMMERLY, GEORGE & HELEN 157 WEST MAIN ST. 001-004 00172 001 BROWN, BETHANY JO 11 COBB RD. 001-005 01972 001 DAKIN, DONNA 15 COBB RD. 001-005-A 00568 001 FRENCH, GERALD & PHOEBE 5 COBB RD. 001-005-B 00567 001 FRENCH, GERALD M., JR. & 3 COBB RD. 001-005-B1 01296 001 SMALL WOODLAND OWNERS COBB RD. 001-006 01149 001 MULREY, SUSAN A. 38 COBB RD. 001-007 00400 001 HEARNE, CAROLYN 18 COBB RD. 001-008 01050 001 MCINTIRE, REBECCA 175 WEST MAIN ST. 001-008-A 01327 001 CAMERON, FRED JR. 23 COBB RD. 001-008-B 00027 001 PORTER, ARTHUR, HEIDI & 173 WEST MAIN ST. 001-008-C 01405 001 ROLLERSON, MARY D. TRUST 20 PORTSIDE LN. 001-009 00933 001 DAVIS, ALEXANDRA P. LA RUE 164 WEST MAIN ST. 001-009-A & B1 00571 001 LELCHUK, IRA & 4 PORTSIDE LN. 001-009-B,B1A & C 00478 001 ANNIS, GARY O. 190 WEST MAIN ST. 001-010 00674 001 HADDOCK, PETER 204 WEST MAIN ST. -

Part-Time Honor Roll Fall 2019
PARTTIME LIST Fall 2019 FIRST NAME MI LAST NAME CITY STATE Justin R Ababneh Kansas City KS Franci Abraham Abarca Kansas City KS Roza Gezhagne Abebe Gardner KS Amy Kristin Abele Leawood KS Tigistu Abicho Olathe KS Yisehaq Abraham Olathe KS Arwa A Abuelrish Overland Park KS Rama Achhra Overland Park KS Isabella Acosta Overland Park KS Anna Adams Overland Park KS Travis Adamson Roeland Park KS Eskinder S Adere Olathe KS Derek W Adkins Kansas City MO Peyton Noel Aerni Shawnee KS Taylor Agee Overland Park KS Darlene Aguilar-Jimenez Kansas City KS Alemneh E Akalu Olathe KS Robert Zachary Akin Amland Lenexa KS Vanessa D Aklagi Overland Park KS Sarah E Al-Dugom Olathe KS Zainab Safaa Abdalfattah Al-Janabi Overland Park KS Hayfa Ali Alamri Olathe KS Imtithal Basem Albadawi Overland Park KS Haider Albaldawy Lenexa KS Oliva M Albanez Grandview MO Sarah A Albert Olathe KS Mesfin K Alemu Olathe KS Kiera M Alexander Lenexa KS Carson Taylor Alexander Muck Lawrence KS Razain Alhassein Olathe KS James P Allen Canadian TX Caitlin Allen overland Park KS Abbey Allerheiligen Overland Park KS Tanya Lynn Allison Kansas City MO Jaimee Dawn Allman Gardner KS Jacqueline Leah Allmer Raytown MO Emily J Allphin Olathe KS Emily R Almloff Overland Park KS Caitlin Elizabeth Almquist Overland Park KS Carolyn Marie-Kern Alspaugh Overland Park KS Emily Lauren Alt Lawrence KS Michael Russell Altman Overland Park KS Austin Gabriel Alvarez Overland Park KS Hussam E Aly Olathe KS Victor Amidon Gladstone MO Achour Ammar Khodja Olathe KS PARTTIME LIST Fall 2019 FIRST NAME MI -
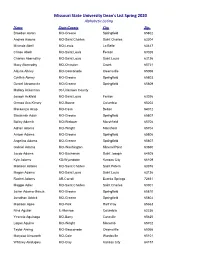
Missouri State University Dean's List Spring 2020 (Sorted Alphabetically)
Missouri State University Dean's List Spring 2020 Alphabetic Listing Name State-County City Zip: Braedon Aaron MO-Greene Springfield 65802 Andrea Aarons MO-Saint Charles Saint Charles 63304 Miranda Abell MO-Lewis La Belle 63447 Chase Abeln MO-Saint Louis Fenton 63026 Charles Abernathy MO-Saint Louis Saint Louis 63126 Macy Abernathy MO-Christian Ozark 65721 Alayna Abney MO-Gasconade Owensville 65066 Cynthia Abney MO-Greene Springfield 65803 Daniel Abramovitz MO-Greene Springfield 65809 Mallary Ackerman 00-Unknown County Joseph Ackfeld MO-Saint Louis Fenton 63026 Oressa Acs-Kinsey MO-Boone Columbia 65202 Mackenzie Acup MO-Cass Belton 64012 Savannah Adair MO-Greene Springfield 65807 Bailey Adamik MO-Webster Marshfield 65706 Adrian Adams MO-Wright Mansfield 65704 Amber Adams MO-Greene Springfield 65806 Angelina Adams MO-Greene Springfield 65807 Gabriel Adams MO-Washington Mineral Point 63660 Jacob Adams MO-Buchanan Saint Joseph 64505 Kyle Adams KS-Wyandotte Kansas City 66109 Madison Adams MO-Saint Charles Saint Peters 63376 Megan Adams MO-Saint Louis Saint Louis 63126 Rachel Adams AR-Carroll Eureka Springs 72631 Maggie Adler MO-Saint Charles Saint Charles 63301 Javier Adorno-Garcia MO-Greene Springfield 65810 Jonathan Adzick MO-Greene Springfield 65802 Madison Agee MO-Polk Half Way 65663 Nina Aguilar IL-Monroe Columbia 62236 Yesenia Aguinaga MO-Barry Cassville 65625 Logan Aguirre MO-Wright Macomb 65702 Taylor Ahring MO-Gasconade Owensville 65066 Maryssa Ainsworth MO-Cole Wardsville 65101 Whitney Akalugwu MO-Clay Kansas City 64157 Missouri -

Family Tree Maker
The PHILIP KARNS, SR. Families and PETER MEARKLE Families Including Allied Families of Virginia and Pennsylvania [Including those coming from Germany and moving to many parts of the USA] Researched and Compiled by Jean Karns Ladd <2013> Forrest E. Ladd, Jr. - Pictures/Graphics FTWDATA_2008_11 thb_Book_Karns_Mearkle_2012.ftw The PHILIP KARNS, SR. and PETER MEARKLE Families including Allied Families of Virginia and Pennsylvania Copyright 2013 All rights reserved. COPY PERMISSION PRIVATIZATION OF LIVING PERSONS IS REQUIRED FOR PROTECTION EXCEPTIONS: Descendants of PHILIP KARNS, Sr., or PETER MEARKLE or Others in this Database ..... for Family Sharing ONLY * * * * * * * PERMISSION IS NOT GIVEN FOR ANY LIVING PERSONS TO BE PUBLISHED, COPIED OR PLACED ON ANY ELECTRONIC MEDIA, INCLUDING WEBPAGES. [FTWDATA KARNS_NEW V. 7 and V. 11, 2011] [thb-Book_Karns_Mearkle_2012.FTW] * * * * * * * Ph: 405-350-8670 E-Mail: [email protected] The PHILIP KARNS, SR. and PETER MEARKLE Families including Allied Families of Virginia and Pennsylvania VOLUME 4 1067 Table of Contents HINTS TO HELP -- Important to Read! . .............................................. 11 A Family .....................................................................15 VOLUME 1 .................................................17 "MY SPECIAL LIST" ............................................................ 19 —FROM WHENCE THEY CAME—BADEN, GERMANY . 21 BADEN, GERMANY ............................................................. 23 BADENROOTS ...............................................................