Introduction to Stream: an Extensible Framework for Data Stream Clustering Research with R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Data Mining – Intro
Data warehouse& Data Mining UNIT-3 Syllabus • UNIT 3 • Classification: Introduction, decision tree, tree induction algorithm – split algorithm based on information theory, split algorithm based on Gini index; naïve Bayes method; estimating predictive accuracy of classification method; classification software, software for association rule mining; case study; KDD Insurance Risk Assessment What is Data Mining? • Data Mining is: (1) The efficient discovery of previously unknown, valid, potentially useful, understandable patterns in large datasets (2) Data mining is the analysis step of the "knowledge discovery in databases" process, or KDD (2) The analysis of (often large) observational data sets to find unsuspected relationships and to summarize the data in novel ways that are both understandable and useful to the data owner Knowledge Discovery Examples of Large Datasets • Government: IRS, NGA, … • Large corporations • WALMART: 20M transactions per day • MOBIL: 100 TB geological databases • AT&T 300 M calls per day • Credit card companies • Scientific • NASA, EOS project: 50 GB per hour • Environmental datasets KDD The Knowledge Discovery in Databases (KDD) process is commonly defined with the stages: (1) Selection (2) Pre-processing (3) Transformation (4) Data Mining (5) Interpretation/Evaluation Data Mining Methods 1. Decision Tree Classifiers: Used for modeling, classification 2. Association Rules: Used to find associations between sets of attributes 3. Sequential patterns: Used to find temporal associations in time series 4. Hierarchical -

CS 61A Streams Summer 2019 1 Streams
CS 61A Streams Summer 2019 Discussion 10: August 6, 2019 1 Streams In Python, we can use iterators to represent infinite sequences (for example, the generator for all natural numbers). However, Scheme does not support iterators. Let's see what happens when we try to use a Scheme list to represent an infinite sequence of natural numbers: scm> (define (naturals n) (cons n (naturals (+ n 1)))) naturals scm> (naturals 0) Error: maximum recursion depth exceeded Because cons is a regular procedure and both its operands must be evaluted before the pair is constructed, we cannot create an infinite sequence of integers using a Scheme list. Instead, our Scheme interpreter supports streams, which are lazy Scheme lists. The first element is represented explicitly, but the rest of the stream's elements are computed only when needed. Computing a value only when it's needed is also known as lazy evaluation. scm> (define (naturals n) (cons-stream n (naturals (+ n 1)))) naturals scm> (define nat (naturals 0)) nat scm> (car nat) 0 scm> (cdr nat) #[promise (not forced)] scm> (car (cdr-stream nat)) 1 scm> (car (cdr-stream (cdr-stream nat))) 2 We use the special form cons-stream to create a stream: (cons-stream <operand1> <operand2>) cons-stream is a special form because the second operand is not evaluated when evaluating the expression. To evaluate this expression, Scheme does the following: 1. Evaluate the first operand. 2. Construct a promise containing the second operand. 3. Return a pair containing the value of the first operand and the promise. 2 Streams To actually get the rest of the stream, we must call cdr-stream on it to force the promise to be evaluated. -

Chapter 2 Basics of Scanning And
Chapter 2 Basics of Scanning and Conventional Programming in Java In this chapter, we will introduce you to an initial set of Java features, the equivalent of which you should have seen in your CS-1 class; the separation of problem, representation, algorithm and program – four concepts you have probably seen in your CS-1 class; style rules with which you are probably familiar, and scanning - a general class of problems we see in both computer science and other fields. Each chapter is associated with an animating recorded PowerPoint presentation and a YouTube video created from the presentation. It is meant to be a transcript of the associated presentation that contains little graphics and thus can be read even on a small device. You should refer to the associated material if you feel the need for a different instruction medium. Also associated with each chapter is hyperlinked code examples presented here. References to previously presented code modules are links that can be traversed to remind you of the details. The resources for this chapter are: PowerPoint Presentation YouTube Video Code Examples Algorithms and Representation Four concepts we explicitly or implicitly encounter while programming are problems, representations, algorithms and programs. Programs, of course, are instructions executed by the computer. Problems are what we try to solve when we write programs. Usually we do not go directly from problems to programs. Two intermediate steps are creating algorithms and identifying representations. Algorithms are sequences of steps to solve problems. So are programs. Thus, all programs are algorithms but the reverse is not true. -

File I/O Stream Byte Stream
File I/O In Java, we can read data from files and also write data in files. We do this using streams. Java has many input and output streams that are used to read and write data. Same as a continuous flow of water is called water stream, in the same way input and output flow of data is called stream. Stream Java provides many input and output stream classes which are used to read and write. Streams are of two types. Byte Stream Character Stream Let's look at the two streams one by one. Byte Stream It is used in the input and output of byte. We do this with the help of different Byte stream classes. Two most commonly used Byte stream classes are FileInputStream and FileOutputStream. Some of the Byte stream classes are listed below. Byte Stream Description BufferedInputStream handles buffered input stream BufferedOutputStrea handles buffered output stream m FileInputStream used to read from a file FileOutputStream used to write to a file InputStream Abstract class that describe input stream OutputStream Abstract class that describe output stream Byte Stream Classes are in divided in two groups - InputStream Classes - These classes are subclasses of an abstract class, InputStream and they are used to read bytes from a source(file, memory or console). OutputStream Classes - These classes are subclasses of an abstract class, OutputStream and they are used to write bytes to a destination(file, memory or console). InputStream InputStream class is a base class of all the classes that are used to read bytes from a file, memory or console. -
C++ Input/Output: Streams 4
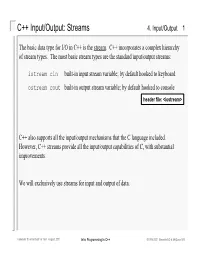
C++ Input/Output: Streams 4. Input/Output 1 The basic data type for I/O in C++ is the stream. C++ incorporates a complex hierarchy of stream types. The most basic stream types are the standard input/output streams: istream cin built-in input stream variable; by default hooked to keyboard ostream cout built-in output stream variable; by default hooked to console header file: <iostream> C++ also supports all the input/output mechanisms that the C language included. However, C++ streams provide all the input/output capabilities of C, with substantial improvements. We will exclusively use streams for input and output of data. Computer Science Dept Va Tech August, 2001 Intro Programming in C++ ©1995-2001 Barnette ND & McQuain WD C++ Streams are Objects 4. Input/Output 2 The input and output streams, cin and cout are actually C++ objects. Briefly: class: a C++ construct that allows a collection of variables, constants, and functions to be grouped together logically under a single name object: a variable of a type that is a class (also often called an instance of the class) For example, istream is actually a type name for a class. cin is the name of a variable of type istream. So, we would say that cin is an instance or an object of the class istream. An instance of a class will usually have a number of associated functions (called member functions) that you can use to perform operations on that object or to obtain information about it. The following slides will present a few of the basic stream member functions, and show how to go about using member functions. -

Subtyping, Declaratively an Exercise in Mixed Induction and Coinduction
Subtyping, Declaratively An Exercise in Mixed Induction and Coinduction Nils Anders Danielsson and Thorsten Altenkirch University of Nottingham Abstract. It is natural to present subtyping for recursive types coin- ductively. However, Gapeyev, Levin and Pierce have noted that there is a problem with coinductive definitions of non-trivial transitive inference systems: they cannot be \declarative"|as opposed to \algorithmic" or syntax-directed|because coinductive inference systems with an explicit rule of transitivity are trivial. We propose a solution to this problem. By using mixed induction and coinduction we define an inference system for subtyping which combines the advantages of coinduction with the convenience of an explicit rule of transitivity. The definition uses coinduction for the structural rules, and induction for the rule of transitivity. We also discuss under what condi- tions this technique can be used when defining other inference systems. The developments presented in the paper have been mechanised using Agda, a dependently typed programming language and proof assistant. 1 Introduction Coinduction and corecursion are useful techniques for defining and reasoning about things which are potentially infinite, including streams and other (poten- tially) infinite data types (Coquand 1994; Gim´enez1996; Turner 2004), process congruences (Milner 1990), congruences for functional programs (Gordon 1999), closures (Milner and Tofte 1991), semantics for divergence of programs (Cousot and Cousot 1992; Hughes and Moran 1995; Leroy and Grall 2009; Nakata and Uustalu 2009), and subtyping relations for recursive types (Brandt and Henglein 1998; Gapeyev et al. 2002). However, the use of coinduction can lead to values which are \too infinite”. For instance, a non-trivial binary relation defined as a coinductive inference sys- tem cannot include the rule of transitivity, because a coinductive reading of transitivity would imply that every element is related to every other (to see this, build an infinite derivation consisting solely of uses of transitivity). -

Anytime Algorithms for Stream Data Mining
Anytime Algorithms for Stream Data Mining Von der Fakultat¨ fur¨ Mathematik, Informatik und Naturwissenschaften der RWTH Aachen University zur Erlangung des akademischen Grades eines Doktors der Naturwissenschaften genehmigte Dissertation vorgelegt von Diplom-Informatiker Philipp Kranen aus Willich, Deutschland Berichter: Universitatsprofessor¨ Dr. rer. nat. Thomas Seidl Visiting Professor Michael E. Houle, PhD Tag der mundlichen¨ Prufung:¨ 14.09.2011 Diese Dissertation ist auf den Internetseiten der Hochschulbibliothek online verfugbar.¨ Contents Abstract / Zusammenfassung1 I Introduction5 1 The Need for Anytime Algorithms7 1.1 Thesis structure......................... 16 2 Knowledge Discovery from Data 17 2.1 The KDD process and data mining tasks ........... 17 2.2 Classification .......................... 25 2.3 Clustering............................ 36 3 Stream Data Mining 43 3.1 General Tools and Techniques................. 43 3.2 Stream Classification...................... 52 3.3 Stream Clustering........................ 59 II Anytime Stream Classification 69 4 The Bayes Tree 71 4.1 Introduction and Preliminaries................. 72 4.2 Indexing density models.................... 76 4.3 Experiments........................... 87 4.4 Conclusion............................ 98 i ii CONTENTS 5 The MC-Tree 99 5.1 Combining Multiple Classes.................. 100 5.2 Experiments........................... 111 5.3 Conclusion............................ 116 6 Bulk Loading the Bayes Tree 117 6.1 Bulk loading mixture densities . 117 6.2 Experiments.......................... -

Improving Iot Data Stream Analytics Using Summarization Techniques Maroua Bahri
Improving IoT data stream analytics using summarization techniques Maroua Bahri To cite this version: Maroua Bahri. Improving IoT data stream analytics using summarization techniques. Machine Learn- ing [cs.LG]. Institut Polytechnique de Paris, 2020. English. NNT : 2020IPPAT017. tel-02865982 HAL Id: tel-02865982 https://tel.archives-ouvertes.fr/tel-02865982 Submitted on 12 Jun 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Improving IoT Data Stream Analytics Using Summarization Techniques These` de doctorat de l’Institut Polytechnique de Paris prepar´ ee´ a` Tel´ ecom´ Paris Ecole´ doctorale n◦626 Denomination´ (Sigle) Specialit´ e´ de doctorat : Informatique NNT : 2020IPPAT017 These` present´ ee´ et soutenue a` Palaiseau, le 5 juin 2020, par MAROUA BAHRI Composition du Jury : Albert Bifet Professor, Tel´ ecom´ Paris Co-directeur de these` Silviu Maniu Associate Professor, Universite´ Paris-Sud Co-directeur de these` Joao˜ Gama Professor, University of Porto President´ Cedric´ Gouy-Pailler Engineer-Researcher, CEA-LIST Examinateur Ons Jelassi -

Frequent Item Set Mining Using INC MINE in Massive Online Analysis Frame Work
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 45 ( 2015 ) 133 – 142 International Conference on Advanced Computing Technologies and Applications (ICACTA- 2015) Frequent Item set Mining using INC_MINE in Massive Online Analysis Frame work Prof.Dr.P.K.Srimania, Mrs. Malini M. Patilb* aFormer Chairman and Director, R & D, Bangalore University, Karnataka, India bAssistant Professor , Dept of ISE , J.S.S. Academy of Technical Education, Bangalore-560060, Karnataka, India Research Scholar, Bharthiar University, Coimbatore, Tamilnadu Abstract Frequent Pattern Mining is one of the major data mining techniques, which is exhaustively studied in the past decade. The technological advancements have resulted in huge data generation, having increased rate of data distribution. The generated data is called as a 'data stream'. Data streams can be mined only by using sophisticated techniques. The paper aims at carrying out frequent pattern mining on data streams. Stream mining has great challenges due to high memory usage and computational costs. Massive online analysis frame work is a software environment used to perform frequent pattern mining using INC_MINE algorithm. The algorithm uses the method of closed frequent mining. The data sets used in the analysis are Electricity data set and Airline data set. The authors also generated their own data set, OUR-GENERATOR for the purpose of analysis and the results are found interesting. In the experiments five samples of instance sizes (10000, 15000, 25000, 35000, 50000) are used with varying minimum support and window sizes for determining frequent closed itemsets and semi frequent closed itemsets respectively. The present work establishes that association rule mining could be performed even in the case of data stream mining by INC_MINE algorithm by generating closed frequent itemsets which is first of its kind in the literature. -

Data Stream Clustering Techniques, Applications, and Models: Comparative Analysis and Discussion
big data and cognitive computing Review Data Stream Clustering Techniques, Applications, and Models: Comparative Analysis and Discussion Umesh Kokate 1,*, Arvind Deshpande 1, Parikshit Mahalle 1 and Pramod Patil 2 1 Department of Computer Engineering, SKNCoE, Vadgaon, SPPU, Pune 411 007 India; [email protected] (A.D.); [email protected] (P.M.) 2 Department of Computer Engineering, D.Y. Patil CoE, Pimpri, SPPU, Pune 411 007 India; [email protected] * Correspondence: [email protected]; Tel.: +91-989-023-9995 Received: 16 July 2018; Accepted: 10 October 2018; Published: 17 October 2018 Abstract: Data growth in today’s world is exponential, many applications generate huge amount of data streams at very high speed such as smart grids, sensor networks, video surveillance, financial systems, medical science data, web click streams, network data, etc. In the case of traditional data mining, the data set is generally static in nature and available many times for processing and analysis. However, data stream mining has to satisfy constraints related to real-time response, bounded and limited memory, single-pass, and concept-drift detection. The main problem is identifying the hidden pattern and knowledge for understanding the context for identifying trends from continuous data streams. In this paper, various data stream methods and algorithms are reviewed and evaluated on standard synthetic data streams and real-life data streams. Density-micro clustering and density-grid-based clustering algorithms are discussed and comparative analysis in terms of various internal and external clustering evaluation methods is performed. It was observed that a single algorithm cannot satisfy all the performance measures. -

Performance Analysis of Hoeffding Trees in Data Streams by Using Massive Online Analysis Framework
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by ePrints@Bangalore University Int. J. Data Mining, Modelling and Management, Vol. 7, No. 4, 2015 293 Performance analysis of Hoeffding trees in data streams by using massive online analysis framework P.K. Srimani R & D Division, Bangalore University Jnana Bharathi, Mysore Road, Bangalore-560056, Karnataka, India Email: [email protected] Malini M. Patil* Department of Information Science and Engineering, J.S.S. Academy of Technical Education, Uttaralli-Kengeri Main Road, Mylasandra, Bangalore-560060, Karnataka, India Email: [email protected] *Corresponding author Abstract: Present work is mainly concerned with the understanding of the problem of classification from the data stream perspective on evolving streams using massive online analysis framework with regard to different Hoeffding trees. Advancement of the technology both in the area of hardware and software has led to the rapid storage of data in huge volumes. Such data is referred to as a data stream. Traditional data mining methods are not capable of handling data streams because of the ubiquitous nature of data streams. The challenging task is how to store, analyse and visualise such large volumes of data. Massive data mining is a solution for these challenges. In the present analysis five different Hoeffding trees are used on the available eight dataset generators of massive online analysis framework and the results predict that stagger generator happens to be the best performer for different classifiers. Keywords: data mining; data streams; static streams; evolving streams; Hoeffding trees; classification; supervised learning; massive online analysis; MOA; framework; massive data mining; MDM; dataset generators. -

Massive Online Analysis, a Framework for Stream Classification and Clustering
MOA: Massive Online Analysis, a Framework for Stream Classification and Clustering. Albert Bifet1, Geoff Holmes1, Bernhard Pfahringer1, Philipp Kranen2, Hardy Kremer2, Timm Jansen2, and Thomas Seidl2 1 Department of Computer Science, University of Waikato, Hamilton, New Zealand fabifet, geoff, [email protected] 2 Data Management and Exploration Group, RWTH Aachen University, Germany fkranen, kremer, jansen, [email protected] Abstract. In today's applications, massive, evolving data streams are ubiquitous. Massive Online Analysis (MOA) is a software environment for implementing algorithms and running experiments for online learn- ing from evolving data streams. MOA is designed to deal with the chal- lenging problems of scaling up the implementation of state of the art algorithms to real world dataset sizes and of making algorithms compa- rable in benchmark streaming settings. It contains a collection of offline and online algorithms for both classification and clustering as well as tools for evaluation. Researchers benefit from MOA by getting insights into workings and problems of different approaches, practitioners can easily compare several algorithms and apply them to real world data sets and settings. MOA supports bi-directional interaction with WEKA, the Waikato Environment for Knowledge Analysis, and is released under the GNU GPL license. Besides providing algorithms and measures for evaluation and comparison, MOA is easily extensible with new contri- butions and allows the creation of benchmark scenarios through storing and sharing setting files. 1 Introduction Nowadays data is generated at an increasing rate from sensor applications, mea- surements in network monitoring and traffic management, log records or click- streams in web exploring, manufacturing processes, call detail records, email, blogging, twitter posts and others.