Comparison of Ipad Pro®'S Lidar and Truedepth Capabilities with An
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
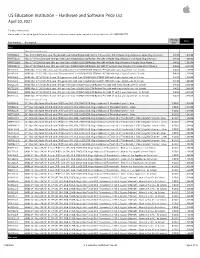
Apple US Education Price List
US Education Institution – Hardware and Software Price List April 30, 2021 For More Information: Please refer to the online Apple Store for Education Institutions: www.apple.com/education/pricelists or call 1-800-800-2775. Pricing Price Part Number Description Date iMac iMac with Intel processor MHK03LL/A iMac 21.5"/2.3GHz dual-core 7th-gen Intel Core i5/8GB/256GB SSD/Intel Iris Plus Graphics 640 w/Apple Magic Keyboard, Apple Magic Mouse 2 8/4/20 1,049.00 MXWT2LL/A iMac 27" 5K/3.1GHz 6-core 10th-gen Intel Core i5/8GB/256GB SSD/Radeon Pro 5300 w/Apple Magic Keyboard and Apple Magic Mouse 2 8/4/20 1,699.00 MXWU2LL/A iMac 27" 5K/3.3GHz 6-core 10th-gen Intel Core i5/8GB/512GB SSD/Radeon Pro 5300 w/Apple Magic Keyboard & Apple Magic Mouse 2 8/4/20 1,899.00 MXWV2LL/A iMac 27" 5K/3.8GHz 8-core 10th-gen Intel Core i7/8GB/512GB SSD/Radeon Pro 5500 XT w/Apple Magic Keyboard & Apple Magic Mouse 2 8/4/20 2,099.00 BR332LL/A BNDL iMac 21.5"/2.3GHz dual-core 7th-generation Core i5/8GB/256GB SSD/Intel IPG 640 with 3-year AppleCare+ for Schools 8/4/20 1,168.00 BR342LL/A BNDL iMac 21.5"/2.3GHz dual-core 7th-generation Core i5/8GB/256GB SSD/Intel IPG 640 with 4-year AppleCare+ for Schools 8/4/20 1,218.00 BR2P2LL/A BNDL iMac 27" 5K/3.1GHz 6-core 10th-generation Intel Core i5/8GB/256GB SSD/RP 5300 with 3-year AppleCare+ for Schools 8/4/20 1,818.00 BR2S2LL/A BNDL iMac 27" 5K/3.1GHz 6-core 10th-generation Intel Core i5/8GB/256GB SSD/RP 5300 with 4-year AppleCare+ for Schools 8/4/20 1,868.00 BR2Q2LL/A BNDL iMac 27" 5K/3.3GHz 6-core 10th-gen Intel Core i5/8GB/512GB -

Managing Research with the Ipad
Managing Research with the iPad Center for Innovation in Teaching and Research Presenter: Sara Settles Instructional Technology Systems Manager Email: [email protected] ©Copyright 2013 Center for Innovation in Teaching and Research Western Illinois University * Contact S. Settles for Permission to Reprint or Copy (V1.2) 1 Overview iPads have brought new abilities to research within the education field adding mobility and ease of use. With the mobility of the iPad along with the development of many apps there are numerous ways the iPad can be used for research. Researchers can now take the iPad into the field and record data and information in a timelier manner. The iPad is being used to record audio, movies, and enter statistics as a means of collecting and analyzing data. Below are iPad apps which can easily be used in research. Dragon Dictation (Free) – Voice recognition uses Dragon® NaturallySpeaking® technology. This application records the users voice and turns into text allowing editing and the ability to share with others via email or SMS. Google Forms – Use Google Docs > Forms to create forms on a laptop or desktop computer. Information can then be entered on the mobile iPad. Login to Google Docs and use the Create > Form button. Create the form using the settings and save. The information can then be accessed using the iPad. Center for Innovation in Teaching & Research • Malpass Library 637 • Phone: 309.298.2434 2 Grafio Lite – Diagrams & Ideas (Formerly - iDesk Lite) (Free) Mind Mapping – Create diagrams with this application. Users can brainstorm creating mind mapping diagrams and flow charts. -

Apple Buys Digital Magazine Subscription Service 12 March 2018
Apple buys digital magazine subscription service 12 March 2018 producing beautifully designed and engaging stories for users." The Texture application launched in 2012, the product of a joint venture created two years earlier. "We could not imagine a better home or future for the service," Texture chief executive John Loughlin said. Despite Apple's spectacular trajectory in the decade since the introduction of the iPhone, the California technology titan is facing challenges on whether it can continue growth. Apple is buying digital magazine subscription service While iPhone sales are at the heart of Apple's Texture, adding to the side of its business aimed at money-making machine, the company has taken to making money from online content or services spotlighting revenue from the App Store, iCloud, Apple Music, iTunes and other content and services people tap into using its devices. Apple announced Monday it is buying digital Texture could add digital magazine subscription magazine subscription service Texture, adding to revenue to that lineup. the side of its business aimed at making money from online content or services. Apple reported that it finished last year with cash reserves of $285 billion—much of that stashed The iPhone maker did not disclose financial terms overseas. of the deal to buy Texture from its owners—publishers Conde Nast, Hearst, Meredith, The company said it would bring back most of its Rogers Media and global investment firm KKR. profits from abroad to take advantage of a favorable tax rate in legislation approved by Texture gives subscribers unlimited access to Congress last year. more than 200 magazines, such as Forbes, Esquire, GQ, Wired, People, The Atlantic and The repatriation will result in a tax bill of about $38 National Geographic for a $10 monthly fee. -

For Immediate Release
FOR IMMEDIATE RELEASE THE JIM HENSON COMPANY AND REHAB ENTERTAINMENT PARTNER WITH AUTHOR/ILLUSTRATOR KAREN KATZ ON LENA!, A NEW ANIMATED PRESCHOOL SERIES Original Series Inspired by Katz’s Award-Winning Title “The Colors of Us” and the Upcoming “My America” Hollywood, CA (July 28, 2020) Rehab Entertainment and The Jim Henson Company are partnering with award- winning author and illustrator Karen Katz to develop Lena!, an original 2D animated preschool series inspired by Katz’s acclaimed picture book The Colors of Us and her upcoming release My America, a new book from MacMillan Publishers (spring, 2021) that celebrates the experiences and stories of U.S. immigrants. Created by Katz and Sidney Clifton, Lena! follows a 7-year-old Guatemalan girl who uses her unique and imaginative way of thinking to explore her culturally diverse neighborhood, identifying ways to help her friends and neighbors along the way. There’s no problem too big or too unusual for Lena's whimsical approach to creative problem-solving in this series all about connection, and she draws from the rich diversity in her community for the resources, support, and inspiration she needs to succeed. For more than twenty years, prolific author and illustrator Karen Katz has released over 85 picture books and board books for children that have been recognized and embraced by critics and parents. Her award-winning titles, including the number-one best-selling Where is Baby’s Bellybutton? and Counting Kisses, have sold 16 million copies worldwide, in over a dozen countries. Katz and Clifton will executive produce Lena! along with John W. -

Music 5 September 2020 Content
St. Michael-Albertville Middle School Music 5 Teacher: Michael Hilden September 2020 Content Skills Learning Targets Assessment Resources & Technology CEQ: A. Tone Color A. Tone Color A. Tone Color A. Tone Color WHAT ARE THE A1-2. "Tone Color ELEMENTS OF A1. Identify tone Digital Video with student MUSIC? color aurally 1. I can identify the CFA A1-2. Tone Color UEQ: "phones" by what they are study guide A1. Identify tone made of and how they Quiz. What do tone colors color producers visually. produce their sound. A1-2. Notebook/SM sound like? ART board World A1. Identify the 2. I can organize Instrument file What instruments create characteristics of tone instruments into their tone colors and what do color correct families. A1-2. GarageBand they look like? computer program A2. Identify tone How do you produce color aurally A1-2. Pachelbel's tone colors? "Canon" MIDI piece on A2. Identify tone A. Tone Color color producers visually. GarageBand A1. Vocal A1-2. Mac computer A2. Identify the characteristics of tone with MIDI keyboard A2. Instrument color controller A2. Choose A1-2. "Bach's Fight appropriate tone colors for For Freedom" DVD. a MIDI piece www.curriculummapper.com 114 Music 5 St. Michael-Albertville Middle Schools October Content Skills Learning Targets Assessment Resources & Technology ACEQ: A. Tone Color 1. I can identify the A. Tone Color A. Tone Color "phones" by what they are WHAT ARE THE made of and how they A1-2. Britten's ELEMENTS OF A1. Identify tone produce their sound. "Young Person's Guide to A1-2. -

Camera Module Comparison 2021 Vol. 2 Apple Iphone Evolution
REVERSEREVERSE COSTING COSTING® –®STRUCTURE?– STRUCTURAL, PROCESS PROCESS AND & COST REPORT Camera Module Comparison 2021 Vol. 2 –CLICKApple TO iPhone EDIT MASTEREvolution TITLE STYLE Apple's camera design choices from the iPhone 6S Plus to the 12 Pro Max. SPR21553 - Imaging report by Peter BONANNO Physical analysis by Véronique LE TROADEC & Guillaume CHEVALIER June 2021 – Sample 22 bd Benoni Goullin 44200 NANTES - FRANCE +33 2 40 18 09 16 [email protected] www.systemplus.fr ©2021 by System Plus Consulting | SPR21553 – Camera Module Comparison 2021 Vol. 2 – Apple iPhone Evolution 1 Table of Contents Overview / Introduction 4 Detailed Physical Analysis 84 o Executive Summary o Front Cameras 84 o Reverse Costing Methodology ✓ Infrared o Glossary ✓ iPhone 11 & 12 Companies & Supply Chain 8 ✓ iPhone XS Max o Apple, Sony, LG Innotek, STMicro ✓ o Players & Market iPhone X o Supply Chain ✓ iPhone 8 Plus Physical Comparison & Evolution 21 ✓ iPhone 7 Plus o Camera Overviews ✓ iPhone 6S Plus o Physical Comparison o Rear Cameras 115 o Overview of the Physical Analysis ✓ iPhone 12 Pro Max Manufacturing Processes 53 ✓ iPhone 11 Pro Max o Camera Module Structure ✓ iPhone XS Max o Image Sensor Manufacturing Processes ✓ iPhone X Cost Comparison 65 ✓ iPhone 8 Plus o CMOS Image Sensor Cost Comparison ✓ iPhone 7 Plus o Front-End Comparison ✓ iPhone 6S Plus o Front Camera Die Cost Comparison Feedback 187 o Rear Camera Die Cost Comparison Related Analyses 189 o Camera Module Cost Comparison System Plus Consulting Services 191 o Front Camera Modules o Rear Single and Dual Camera Modules o Rear Triple Camera Modules o Camera Cost Breakdown o Camera Price Comparison ©2021 by System Plus Consulting | SPR21553 – Camera Module Comparison 2021 Vol. -

3Aa7da6d3554e07e7abc52fb2b
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B7, 2016 XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic SCENE CLASSFICATION BASED ON THE SEMANTIC-FEATURE FUSION FULLY SPARSE TOPIC MODEL FOR HIGH SPATIAL RESOLUTION REMOTE SENSING IMAGERY Qiqi Zhua,b,Yanfei Zhonga,b,* , Liangpei Zhanga,b a State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China – [email protected], (zhongyanfei, zlp62)@whu.edu.cn b Collaborative Innovation Center of Geospatial Technology, Wuhan University, Wuhan 430079, China Commission VII, WG VII/4 KEY WORDS: Scene classification, Fully sparse topic model, Semantic-feature, Fusion, Limited training samples, High spatial resolution ABSTRACT: Topic modeling has been an increasingly mature method to bridge the semantic gap between the low-level features and high-level semantic information. However, with more and more high spatial resolution (HSR) images to deal with, conventional probabilistic topic model (PTM) usually presents the images with a dense semantic representation. This consumes more time and requires more storage space. In addition, due to the complex spectral and spatial information, a combination of multiple complementary features is proved to be an effective strategy to improve the performance for HSR image scene classification. But it should be noticed that how the distinct features are fused to fully describe the challenging HSR images, which is a critical factor for scene classification. In this paper, a semantic-feature fusion fully sparse topic model (SFF-FSTM) is proposed for HSR imagery scene classification. In SFF- FSTM, three heterogeneous features—the mean and standard deviation based spectral feature, wavelet based texture feature, and dense scale-invariant feature transform (SIFT) based structural feature are effectively fused at the latent semantic level. -

6 Universal Texture Compression Format Mar17
Universal Texture Compression Format WebGL/WebVR/glTF Meetup Stephanie Hurlburt Introduction I work at Binomial, a company building a texture compressor called Basis. I’m currently fully focused on building this up with my business partner, Rich Geldreich. Since Basis uniquely solves a texture compression problem, especially in the WebGL/WebVR pipelines, we are more than happy to donate our texture file format specification and transcoder as a standard to the Khronos Group. We are standardizing this as a part of glTF. Using JPEG for textures A common way to handle texture data is to compress to JPEG, and store uncompressed on the GPU It has decent reasoning behind it CPU-side (JPEGs are small!), but truly limits your graphical capacity. GPU formats were made to improve upon this pipeline! We should use them! (Side note: You don’t want to compress to JPEG and then turn that into a GPU format. Great CPU storage, but heavy runtime processing and double-artifacts and poor GPU compression) Using GPU formats for textures This is what we want to do, but there exists a problem in the existing pipeline. Right now web developers have to store a copy of every GPU format they want to support (at least ETC for Android/Metal iOS, PVRTC for non-Metal (older) iOS, and DXT for desktop-- and more if you want better quality!) To give some perspective-- even if you’re only storing one GPU format, GPU formats are not meant for CPU storage and are still very big. This is where Basis comes in One format, the size of JPEG, that turns into the GPU format you need when you need it. -
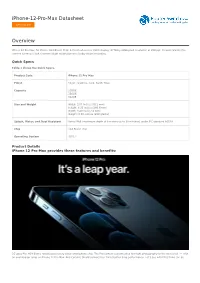
Iphone-12-Pro-Max Datasheet Overview
iPhone-12-Pro-Max Datasheet Get a Quote Overview iPhone 12 Pro Max, 5G Phone. A14 Bionic Chip; 6.7-inch all-screen OLED display; 2778-by-1284-pixel resolution at 458 ppi; Ceramic Shield; Pro camera system; LiDAR Scanner; Night mode portraits; Dolby Vision recording. Quick Specs Table 1 shows the Quick Specs. Product Code iPhone 12 Pro Max Finish Silver, Graphite, Gold, Pacific Blue Capacity 128GB 256GB 512GB Size and Weight Width: 3.07 inches (78.1 mm) Height: 6.33 inches (160.8 mm) Depth: 0.29 inch (7.4 mm) Weight: 8.03 ounces (228 grams) Splash, Water, and Dust Resistant Rated IP68 (maximum depth of 6 meters up to 30 minutes) under IEC standard 60529 Chip A14 Bionic chip Operating System iOS 14 Product Details iPhone 12 Pro Max provides these features and benefits: 5G goes Pro. A14 Bionic rockets past every other smartphone chip. The Pro camera system takes low-light photography to the next level — with an even bigger jump on iPhone 12 Pro Max. And Ceramic Shield delivers four times better drop performance. Let’s see what this thing can do. 5G transforms iPhone with accelerated wireless speeds and better performance on congested networks.5 Now you can download huge files on the go or stream high-quality HDR movies. Without. All. The. Lag. iPhone also has the most 5G bands of any smartphone so you get 5G in more places. And all that speed opens up amazing possibilities for the future of apps. A14 Bionic The only thing even close was our last chip. -

Itunes App Store Promotional Design Specifications the Following Specifications Are Required When Submitting Design Elements for Promotion of App on Itunes
iTunes App Store Promotional Design Specifications The following specifications are required when submitting design elements for promotion of App on iTunes. • Acceptable file types are: layered .psd, transparent .tif, vector .ai, or .eps files. • The following assets are required if an App is selected to be promoted on the iTunes Store. Submission of assets does not guarantee promotion on iTunes. Required Assets Title treatment Include a title treatment / logo for your application (vector .eps, .ai or minimum 600 x 600 px transparent .psd or .tif). The title treatment should be simple and easy to read when scaled down to a small size. Please limit tag or bylines if they are not legible at small scale. Background image Include a background image, texture, color or gradient that corresponds to your application, or is complimentary to your title treatment. App Store “Main” “Splash” Graphic links to individual Application or other location (as programmed by iTunes). Required assets: · title treatment · background image “Brick” Graphic links to individual Application or other location (as programmed by iTunes). Required assets: · title treatment · background image “Icon” Graphic links to individual Application This image is delivered to iTunes via iTunes Connect. Additional Considerations: • Assets that do not follow the above guidelines may be rejected and/or delay potential promotion of application. • "Tags" will be added by iTunes when appropriate, to communicate promotion (i.e. “Application Just Added”). 1 iTunes App Store Promotional Design Specifications (con’t) iTunes may feature your application with a customized page design. If your app is to be featured in this manner, you will be contacted for additional assets The following assets are required if an App is selected for a custom page design on the iTunes Store: Customized Application Page “Background image” The background image, texture, color or gradient should correspond to your application or compliment the title treatment. -

Certified Devices
FIRSTNET CERTIFIED DEVICES Device OEM Device Model Device Name Band 14 FirstNet 5G Support? Support A Beep DTP9751 Yes ABB Enterprise Software T6225C100D201010 TropOS TRO620 Yes Advance Electronic Design Inc. URC-1 Yes AdvanceTec Industries Inc. ATT8564A Yes Advantech B+B Smartworx IRC-3200 Yes Allerio Inc. AMH100 Yes Apple A2200 iPad 7 Yes Apple A2428 iPad 8th gen Yes Apple A2153 iPad Air 3 Yes Apple A2324 iPad Air 4 Yes Apple A2126 iPad Mini 5 Yes Apple A2603 iPad_10.2” (9th Gen) Yes Apple A2568 iPad Mini 5G_8.3” (6th Yes Yes Gen) Apple A2014 iPad Pro 3 12.9 Yes Apple A2013 iPad Pro 11 Yes Apple A2301 iPad Pro 11 (3rd Gen) Yes Yes Apple A2068 iPad Pro 12.9-in (4th gen) Yes Apple A2379 iPad Pro 12.9 (5th Gen) Yes Yes Apple A1984 iPhone XR Yes Apple A1920 iPhone XS Yes Apple A1921 iPhone XS Max Yes Apple A2111 iPhone 11 Yes Apple A2160 iPhone 11 Pro Yes Apple A2161 iPhone 11 Pro Max Yes Apple A2172 iPhone 12 Yes Yes Apple A2176 iPhone 12 Mini Yes Yes Apple A2341 iPhone 12 Pro Yes Yes Apple A2342 iPhone 12 Pro Max Yes Yes Apple A2482 iPhone 13 Yes Yes Apple A2481 iPhone 13 Mini Yes Yes Apple A2483 iPhone 13 Pro Yes Yes Apple A2484 iPhone 13 Pro Max Yes Yes Apple A2275 iPhone SE (2nd Gen) Yes Apple A2294 Watch SE Big Apple A2293 Watch SE Small Apple A1976 Watch Series 4 Big Apple A1975 Watch Series 4 Small Yes Apple A2095 Watch Series 5 Big Yes Apple A2094 Watch Series 5 Small Yes © 2021 AT&T Intellectual Property. -

Apple US Education Institution Price List
US Education Institution – Hardware and Software Price List December 10, 2019 For More Information: Please refer to the online Apple Store for Education Institutions: www.apple.com/education/pricelists or call 1-800-800-2775. Pricing Price Part Number Description Date iMac MMQA2LL/A iMac 21.5"/2.3GHz dual-core 7th-gen Intel Core i5/8GB/1TB hard drive/Intel Iris Plus Graphics 640 w/Apple Magic Keyboard, Apple Magic Mouse 2 6/5/17 1,049.00 MRT32LL/A iMac 21.5" 4K/3.6GHz quad-core 8th-gen Intel Core i3/8GB/1TB hard drive/Radeon Pro 555X w/Apple Magic Keyboard and Apple Magic Mouse 2 3/19/19 1,249.00 MRT42LL/A iMac 21.5" 4K/3.0GHz 6-core 8th-gen Intel Core i5/8GB/1TB Fusion drive/Radeon Pro 560X w/Apple Magic Keyboard and Apple Magic Mouse 2 3/19/19 1,399.00 MRQY2LL/A iMac 27" 5K/3.0GHz 6-core 8th-gen Intel Core i5/8GB/1TB Fusion drive/Radeon Pro 570X w/Apple Magic Keyboard and Apple Magic Mouse 2 3/19/19 1,699.00 MRR02LL/A iMac 27" 5K/3.1GHz 6-core 8th-gen Intel Core i5/8GB/1TB Fusion drive/Radeon Pro 575X w/Apple Magic Keyboard & Apple Magic Mouse 2 3/19/19 1,899.00 MRR12LL/A iMac 27" 5K/3.7GHz 6-core 8th-gen Intel Core i5/8GB/2TB Fusion drive/Radeon Pro 580X w/Apple Magic Keyboard & Apple Magic Mouse 2 3/19/19 2,099.00 BMPP2LL/A BNDL iMac 21.5"/2.3GHz dual-core 7th-generation Core i5/8GB/1TB hard drive/Intel IPG 640 with AppleCare+ for Mac 6/5/17 1,168.00 BNR82LL/A BNDL iMac 21.5" 4K/3.6GHz quad-core 8th-generation Intel Core i3/8GB/1TB hard drive/RP 555X with AppleCare+ for Mac 3/19/19 1,368.00 BNR92LL/A BNDL iMac 21.5" 4K/3.0GHz 6-core