Mixture Model of Generalized Chain-Dependent Processes and Its
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Phaedra Upton1, Rachel Skudder2 and the Mackenzie Basin Lakes
Using coupled models to place constraints on fluvial input into Lake Ohau, New Zealand Phaedra Upton1, Rachel Skudder2 and the Mackenzie Basin Lakes Team3 [email protected], 1GNS Science, 2Victoria University of Wellington, 3GNS Science + Otago University + Victoria University of Wellington 2004: no large storms 0 2000 kg/sec 1/1/10 daily rainfall Godley River modelled suspended sediment load Tasman River LakeTekapo 1/1/00 0 200 mm Lake Pukaki 1995: large summer storm 0 2000 kg/sec Hopkins River Box core #1 1/1/90 daily rainfall modelled suspended Lake Ohau Box core #2 Raymond Film Services sediment load Ahuriri River Figure 2: Lake Tekapo following a large rainfall event in its catchment. A sediment laden inflow plunges into the lake and leaves the surface waters clear. We use HydroTrend (Kettner and Syvitski 2008, Computers and 6 m core Daily Rainfall (mm) 0 200 mm Geoscience, 34) to calculate the overall sediment influx into the lake and 1/1/80 couple it to a conceptual model of how this sediment might be distributed 1969: large winter storm through the lake basin depending on the season to produce model cores. 0 2000 kg/sec 0 3 6 12 18 24km Figure 1: Located east of the main divide in the central Southern Alps, the Mackenzie Lakes; Ohau, Pukaki and Tekapo, occupy fault Figure 3: Map of Lake Ohau showing the location of the three cores we controlled glacial valleys and contain high resolution sedimentary compare our models to. daily rainfall records of the last ~17 ka. These sediments potentially contain a 1/1/70 modelled suspended record of climatic events and transitions, earthquakes along the Alpine sediment load Fault to the northwest, landscape response during and following deglaciation and recent human-influenced land use changes. -

Alternative Route to Twizel
AORAKI/MT COOK WHITE HORSE HILL CAMPGROUND MOUNT COOK VILLAGE BURNETT MOUNTAINS MOUNT COOK AIRPORT TASMAN POINT Tasman Valley Track FRED’S STREAM TASMAN RIVER JOLLIE RIVER SH80 Jollie Carpark Braemar-Mount Cook Station Rd GLENTANNER PARK CENTRE LAKE PUKAKI LAKE TEKAPO 54KM LANDSLIP CREEK ALTERNATIVE ROUTE TO TWIZEL TAKAPÕ LAKE TEKAPO MT JOHN OBSERVATORY BRAEMAR ROAD TAKAPŌ/LAKE TEKAPO Tekapo Powerhouse Rd TEKAPO A POWER STATION SH8 3km Hayman Rd Tekapo Canal Rd PATTERSONS PONDS TEKAPO CANAL 9km 15km 24km Tekapo Canal Rd LAKE PUKAKI SALMON FARM TEKAPO RIVER TEKAPO B POWER STATION Hayman Road 30km Lakeside Dr TAKAPŌ/LAKE TEKAPO 35km Tek Church of the apo-Twizel Rd Good Shepherd 8 MARY RANGES Dog Monument SALMONFA RM TO SALMON SHOP SH80 TEKAPO RIVER SH8 r s D 44km e r r C e i e Pi g n on SALMON SHOP n Roto Pl o RUATANIWHA i e a e P r r D CONSERVATION PARK o r A Scott Pond STARTING POINT PUKAKI CANAL SH8 Aorangi Cres 8 8 F Rd Lakeside airlie kapo -Te Car Park PUKAKI RIVER Lochinvar Ave Allan St Lilybank Rd Glen Lyon Rd r D n o P l Glen Lyon Rd ilt ollock P Andrew Don Dr am Old Glen Lyon Rd H N Pukaki Flats Track Rise TWIZEL 54km Murray Pl Rankin PUKAKI FLATS OHAU CANAL LAKE RUATANIWHA SH8KEY: Fitness Easy Traffic Low 800 TEKAPO TWIZEL Onroad left onto Hayman Rd and ride to the Off-road trail 700 start of the off-road Trail on your right Skill Easy Grade 2 Information Centre 35km which follows the Lake Pukaki 600 Picnic Area shoreline. -
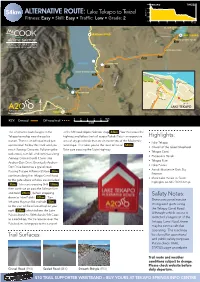
Lake Tekapo to Twizel Highlights
AORAKI/MT COOK WHITE HORSE HILL CAMPGROUND MOUNT COOK VILLAGE BURNETT MOUNTAINS MOUNT COOK AIRPORT TASMAN POINT Tasman Valley Track FRED’S STREAM TASMAN RIVER JOLLIE RIVER SH80 Jollie Carpark Braemar-Mount Cook Station Rd 800 TEKAPO TWIZEL 700 54km ALTERNATIVEGLENTANNER PARK CENTRE ROUTE: Lake Tekapo to Twizel 600 LANDSLIP CREEK ELEVATION Fitness: Easy • Skill: Easy • Traffic: Low • Grade: 2 500 400 KM LAKE PUKAKI 0 10 20 30 40 50 MT JOHN OBSERVATORY LAKE TEKAPO BRAEMAR ROAD Tekapo Powerhouse Rd LAKE TEKAPO TEKAPO A POWER STATION SH8 3km TRAIL GUARDIAN Hayman Rd SALMON FARM TO SALMON SHOP Tekapo Canal Rd PATTERSONS PONDS 9km TEKAPO CANAL 15km Tekapo Canal Rd LAKE PUKAKI SALMON FARM 24km TEKAPO RIVER TEKAPO B POWER STATION Hayman Road LAKE TEKAPO 30km Lakeside Dr Te kapo-Twizel Rd Church of the 8 Good Shepherd Dog Monument MARY RANGES SH80 35km r s D TEKAPO RIVERe SH8 r r 44km C e i e Pi g n on n Roto Pl o i e a e P SALMON SHOP r r D o r A Scott Pond Aorangi Cres 8 PUKAKI CANAL SH8 F Rd airlie-Tekapo PUKAKI RIVER Allan St Glen Lyon Rd Glen Lyon Rd LAKE TEKAPO Andrew Don Dr Old Glen Lyon Rd Pukaki Flats Track Murray Pl TWIZEL PUKAKI FLATS Mapwww.alps2ocean.com current as of 28/7/17 N 54km OHAU CANAL LAKE RUATANIWHA 0 1 2 3 4 5km KEY: Onroad Off-road trail SH8 Scale The alternative route begins in the at the Mt Cook Alpine Salmon shop 44km . You then cross the Tekapo township near the police highway and follow the trail across Pukaki Flats – an expansive Highlights: station. -
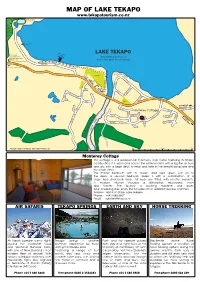
Map of Lake Tekapo
MAP OF LAKE TEKAPO www.tekapotourism.co.nz Tekapo Springs and Winter Park Mt John walkway. Access to Earth and Sky and Astro cafe Boat ramp Power station LAKE TEKAPO Earth and Sky intake Observatory 7.6km KEEP CLEAR www.tekapotourism.co.nz Mackenzie Alpine Horse Trekking 1.5km Your online guide to Lake Tekapo (via Godley Peaks Road) STAT SIDE D E LAKE RIVE HIG Air Safaris airport 1.5km HW AY 8 Boat ramp CHURCH OF THE GOOD SHEPHERD DOMAIN DOG STATUE V I D L R LA IV G R E E E C E E N N T O R I E P E ROT ZI O N S E EA K D A LY C D ’AR O A L C R M A H IA A B C D N P B R G I IV M S E I A W H AL C STATE TE U HIGH R B A WAY LA C E CK RES PARK B 8 B I L L S A Roundhill Ski A P M E S Area 32km S E A AD V LL RO I A LILYBANK L N S LO N R T CHI D J Monterey Cottage E V ER E V E I U S R A N T D V H N E L E E O HAY N P N A R SC BARBAR Mt Dobson D OTT O P U D O K T H L C S L LO E S W I Ski Area 43km T O M T Y A P E H W E R E R R VE O RISE D I ’ IN N K N R MURRA AN Y R PLACE E A B I L U L R O N P ET A T K E T Copyright Tekapo Tourism Ltd. -

Aoraki Mt Cook
Anna Thompson: Aoraki/Mt Cook – cultural icon or tourist “object” The natural areas of New Zealand, particularly national parks, are a key attraction for domestic and international visitors who venture there for a variety of recreation and leisure purposes. This paper discusses the complex cultural values and timeless quality of an iconic landmark - Aoraki/Mt Cook – which is located within the ever-changing Mackenzie Basin. It explores the various human values for the mountain and the surrounding regional landscape which has become iconic in its own right. The landscape has economic, environmental, scientific and social significance with intangible heritage values and connotations of sacred and sublime experiences of place. The paper considers Aoraki/Mt Cook as a ‘wilderness’ region that is also a focal point not only for local inhabitants but also for travellers sightseeing and recreating in the area. The paper also explores how cultural values for the mountain are interpreted to visitors in an attempt to convey a sense of ‘place’. Finally the Mackenzie Basin is discussed as a special ‘in-between’ place – that should be considered significant in its own right and not just as a ‘foreground’ or ‘frame’ for viewing the Southern Alps and Aoraki/Mt Cook itself. The Mackenzie has aesthetic scenic qualities that need careful management of activities such as recent attempts to establish industrialised, dairy factory farming (which does not complement more sustainable economic and social development in the region). Sympathetic projects such as the Nga Haerenga (Ocean to the Alps) cycle way are also under development to encourage activity within the landscape – in conflict with the dairying and other activities that impact negatively on the natural resources of the region.1 Introduction – cultural values for landscape and ‘place’ Aotearoa New Zealand is regarded by many as a ‘young country’ – the last indigenous populated country to be colonised by European cultures. -
TS2-V6.0 11-Aoraki
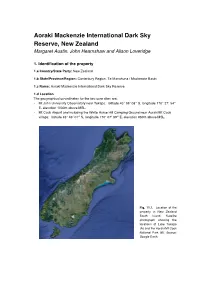
Aoraki Mackenzie International Dark Sky Reserve, New Zealand Margaret Austin, John Hearnshaw and Alison Loveridge 1. Identification of the property 1.a Country/State Party: New Zealand 1.b State/Province/Region: Canterbury Region, Te Manahuna / Mackenzie Basin 1.c Name: Aoraki Mackenzie International Dark Sky Reserve 1.d Location The geographical co-ordinates for the two core sites are: • Mt John University Observatory near Tekapo: latitude 43° 59′ 08″ S, longitude 170° 27′ 54″ E, elevation 1030m above MSL. • Mt Cook Airport and including the White Horse Hill Camping Ground near Aoraki/Mt Cook village: latitude 43° 46′ 01″ S, longitude 170° 07′ 59″ E, elevation 650m above MSL. Fig. 11.1. Location of the property in New Zealand South Island. Satellite photograph showing the locations of Lake Tekapo (A) and the Aoraki/Mt Cook National Park (B). Source: Google Earth 232 Heritage Sites of Astronomy and Archaeoastronomy 1.e Maps and Plans See Figs. 11.2, 11.3 and 11.4. Fig. 11.2. Topographic map showing the primary core boundary defined by the 800m contour line Fig. 11.3. Map showing the boundaries of the secondary core at Mt Cook Airport. The boun- daries are clearly defined by State Highway 80, Tasman Valley Rd, and Mt Cook National Park’s southern boundary Aoraki Mackenzie International Dark Sky Reserve 233 Fig. 11.4. Map showing the boundaries of the secondary core at Mt Cook Airport. The boundaries are clearly defined by State Highway 80, Tasman Valley Rd, and Mt Cook National Park’s southern boundary 234 Heritage Sites of Astronomy and Archaeoastronomy 1.f Area of the property Aoraki Mackenzie International Dark Sky Reserve is located in the centre of the South Island of New Zealand, in the Canterbury Region, in the place known as Te Manahuna or the Mackenzie Basin (see Fig. -

Annual Report 2019/20 Alpine Energy Annual Report 2019/20 Alpine Energy Annual Report 2019/20
ANNUAL REPORT 2019/20 ALPINE ENERGY ANNUAL REPORT 2019/20 ALPINE ENERGY ANNUAL REPORT 2019/20 CONTENTS Highlights ................................................................................................. 2 Chairman and Chief Executive’s report ....................................4 Our vision, purpose and values .................................................... 6 Financial summary ............................................................................... 8 Empowering our people ................................................................. 10 Empowering our network ...............................................................12 Empowering our community ...................................................... 20 Empowering our future .................................................................. 24 Financial statements ........................................................................29 Harsh, unabating, persistent, uncompromising. Beautiful, inspiring, empowering, calming. The power of nature as she empowers our community. 100% of the power we distribute starts its journey in the Southern Alps of our beautiful country. > PAGE 1 > PAGE 2 ALPINE ENERGY ANNUAL REPORT 2019/20 ALPINE ENERGY ANNUAL REPORT 2019/20 FINANCIAL NETWORK $91.31m $11.66m $33.7m $8.16m 33,446 841 140MW Revenue Earnings before interest and tax Customer connections Gigawatt hours Network maximum of electricity demand delivered $21.63m $7.89m $9.92m same as 2019 594km 3,294km 46,000 of distribution & of distribution & LV wood & concrete poles, -

Christchurch to Lake Tekapo
Day 1: Christchurch to Lake Tekapo We stay along this lake in Tekapo. Day Plan Kia Ora and welcome to New Zealand! We begin our South Island tour in its biggest city. Often referred to as the 'Garden City', Christchurch is characterised by wide tree-lined avenues, beautifully maintained gardens, ambling inner-city rivers and restored heritage buildings. Your day begins with an orientation tour of Christchurch’s surrounding area. Unfortunately the earthquakes of September 2010 and February 2011 have damaged many buildings, including the iconic cathedral - but the city is in the re-build stage and things look optimistic for its future. After lunch we leave Christchurch and head south for Lake Tekapo. This picture perfect lakeside village is known as a ski resort in winter and aquatic playground in summer. The landscape of the surrounding Southern Alps is outstanding, sculpted by successive Ice Age glaciers, the remnants of which give the lake its intense turquoise hue. The sky is huge and of extraordinary clarity, making this one of the world’s best locations to probe the heavens. An observatory sits on top of Mt John. Our accommodation is situated right along the edge of the lake. Day 2: Lake Tekapo to Queenstown Mt John has the worlds best star gazing! Day Plan We have time to enjoy Lake Tekapo before leaving for Queenstown in the mid-morning. Your guide will take a break at one of the many salmon farms along the drive to allow you to feed the salmon and taste some sashimi. After heading past Lake Pukaki and Mt Cook (the highest in New Zealand at 3,764 metres) and through the village of Omarama there is a chance to experience some wine tasting just outside of Queenstown. -

Nohoanga Site Information Sheet Whakarukumoana (Lake Mcgregor)
Updated August 2020 NOHOANGA SITE INFORMATION SHEET WHAKARUKUMOANA (LAKE MCGREGOR), SOUTH CANTERBURY Getting there • The site is adjacent to an existing camping area, on the edge of Whakarukumoana (Lake McGregor). • From the Lake Tekapo township, travel towards Twizel on SH8 and turn off into the Godley Peaks Road. • Follow the gravel road for 8-9km and take the second turn on the left. • From the turnoff, the site is about 1km along at the south end of Lake McGregor, opposite the fence from the public camping site. • The site is not signposted or marked. Signage is expected to be installed in late 2020. For further information phone 0800 NOHOANGA or email [email protected] Page 1 of 5 Updated August 2020 Physical description • The nohoanga is quite flat and is bordered by the lake, road, and fence of the public camp site. • The site is large, mostly flat, and suitable for tenting and campervans and caravans. • There is no shade on site. Vehicle access and parking • The site has excellent vehicle access and is suitable for campervans and caravans. • Parking is plentiful on site. Facilities and services • The are no facilities at the Whakarukumoana (Lake McGregor) nohoanga site. Site users need to provide their own toilet (portaloo or chemical toilet) and shower facilities. • Nohoanga site users are required to provide their own water supplies. • The adjacent public camping site has some facilities – toilets (available from the end of September to the beginning of May) and a designated area for solar showers (water available in the creek). People must pay a daily fee per person for the use of these facilities to the Camping Committee. -

The Aoraki Mackenzie International Dark Sky Reserve
The Aoraki Mackenzie International Dark Sky Reserve and light pollution issues in New Zealand John Hearnshaw Emeritus professor of astronomy University of Canterbury, New Zealand IAU General Assembly, Honolulu, 12 August 2015 Professor John Hearnshaw University of Canterbury, IAU GA Honolulu, 12 August 2015 Honolulu, 12 IAU GA Professor John Hearnshaw University of Canterbury, The Mackenzie District Lighting Ordinance 1981 Lighting Ordinance drawn up in Mackenzie District Plan. Enacted through Town & Country Planning Act 1977. Controls outdoor lighting (types of light, full cut-off, limits emission below 440 nm, restricts times when outdoor recreational illumination is permitted). The objective of the ordinance is: ‘Maintenance of the ability to undertake effective research at the Mt John University Observatory and of the ability to view the quality of the night sky’. Professor John Hearnshaw University of Canterbury, IAU GA Honolulu, 12 August 2015 Honolulu, 12 IAU GA Professor John Hearnshaw University of Canterbury, Area of the lighting ordinance The lighting ordinance applies over a large area of the Mackenzie Basin, including all of Lakes Tekapo and Pukaki. Area ~ 60 km EW; ~ 100 km NS. 25 km Professor John Hearnshaw University of Canterbury, IAU GA Honolulu, 12 August 2015 Honolulu, 12 IAU GA Professor John Hearnshaw University of Canterbury, Where are we? Mt John and Tekapo from space MJUO Professor John Hearnshaw University of Canterbury, IAU GA Honolulu, 12 August 2015 Honolulu, 12 IAU GA Professor John Hearnshaw University of Canterbury, Light pollution as seen from space The light recorded in these satellite images represents light going up into space. It is wasted light and wasted energy. -
Twizel Highlights
FAIRLIE | LAKE TEKAPO | AORAKI / MOUNT COOK | TWIZEL HIGHLIGHTS FAIRLIE Explore local shops | Cafés KIMBELL Walking trails | Art gallery BURKES PASS Shopping & art | Heritage walk | Historic Church LAKE TEKAPO Iconic Church | Walks/trails LAKE PUKAKI Beautiful scenery | Lavender farm GLENTANNER Beautiful vistas | 18kms from Aoraki/Mount Cook Village AORAKI/MOUNT COOK Awe-inspiring mountain views | Adventure playground TWIZEL Quality shops | Eateries | Five lakes nearby | Cycling Welcome to the Mackenzie Region The Mackenzie Region spaces are surrounded by SUMMER provides many WINTER in the Mackenzie winter days are perfect is located at the heart snow-capped mountains, experiences interacting is unforgettable with for scenic flights and the p18 FAIRLIE of New Zealand’s South including New Zealand’s with the natural landscape uncrowded snow fields and nights crisp and clear for Island, 2.5 hour’s drive from tallest, Aoraki/Mount Cook, of our unique region, from unique outdoor experiences spectacular stargazing. Christchurch or 3 hours from with golden tussocks giving star gazing tours and scenic as well as plenty of ways p20 LAKE TEKAPO Be spoilt for choice Dunedin/Queenstown. way to turquoise-blue lakes, flights, to hot pools and to relax after a day on the with a wide variety of Explore one of the most fed by meltwater from cycle trails. Check out 4WD slopes. Ride the snow tube, accommodation styles, eat picturesque regions offering numerous glaciers. tours, farm tours and boating visit our family friendly snow local cuisine, and smile at p30 AORAKI/MOUNT COOK bright, sunny days and dark experiences or get your fields or relax in the hot pools. -

Lake Tekapo – Aoraki – Mount Cook Starlight Reserve, New Zealand
Case Study 16.1: Lake Tekapo – Aoraki – Mount Cook Starlight Reserve, New Zealand Margaret Austin and John Hearnshaw Presentation and analysis of the site Geographical position: Central South Island of New Zealand in an area bounded by the main range of the Southern Alps in the west and the Two Thumb Range in the east, including a large part of the Mackenzie Basin and also Mount Cook National Park in the province of Canterbury. Villages include Tekapo, Mount Cook and Twizel. Location: Latitude 44º 00.5´ S, longitude 170º 28.7´ E (Tekapo Village). Elevation from 710m above mean sea level (Lake Tekapo) to 3750m above mean sea level (Mount Cook). General description: The core area is Mount John University Observatory (elevation 1032m) on the south-western shore of Lake Tekapo. Tekapo Village (population about 400) is 3 km from the summit of Mount John in a direct line. Twizel and Mount Cook Village are 40 km and 50 km from the summit respectively, neither being visible from Mount John. Inventory of the remains : The Mount John University Observatory houses four research telescopes of apertures 1.8, 1.0, 0.6 and 0.6m respectively. History of the site: The Mount John site was surveyed in the early 1960s using NSF funds from the University of Pennsylvania. The observatory was founded in 1965 as a joint astronomical research station of the Universities of Canterbury and Pennsylvania. The partnership continued for a decade. Cultural and symbolic dimension: The Mount John site is the principal astronomical observatory in New Zealand and the world’s southernmost observatory (other than instruments in the Antarctic).