Numerical Simulation of the Flow of a Power Law Fluid in An
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shear Thickening in Concentrated Suspensions: Phenomenology
Shear thickening in concentrated suspensions: phenomenology, mechanisms, and relations to jamming Eric Brown School of Natural Sciences, University of California, Merced, CA 95343 Heinrich M. Jaeger James Franck Institute, The University of Chicago, Chicago, IL 60637 (Dated: July 22, 2013) Shear thickening is a type of non-Newtonian behavior in which the stress required to shear a fluid increases faster than linearly with shear rate. Many concentrated suspensions of particles exhibit an especially dramatic version, known as Discontinuous Shear Thickening (DST), in which the stress suddenly jumps with increasing shear rate and produces solid-like behavior. The best known example of such counter-intuitive response to applied stresses occurs in mixtures of cornstarch in water. Over the last several years, this shear-induced solid-like behavior together with a variety of other unusual fluid phenomena has generated considerable interest in the physics of densely packed suspensions. In this review, we discuss the common physical properties of systems exhibiting shear thickening, and different mechanisms and models proposed to describe it. We then suggest how these mechanisms may be related and generalized, and propose a general phase diagram for shear thickening systems. We also discuss how recent work has related the physics of shear thickening to that of granular materials and jammed systems. Since DST is described by models that require only simple generic interactions between particles, we outline the broader context of other concentrated many-particle systems such as foams and emulsions, and explain why DST is restricted to the parameter regime of hard-particle suspensions. Finally, we discuss some of the outstanding problems and emerging opportunities. -

Impact of Thixotropy on Flow Patterns Induced in a Stirred Tank
CORE Metadata, citation and similar papers at core.ac.uk Provided by Open Archive Toulouse Archive Ouverte Impact of thixotropy on flow patterns induced in a stirred tank: Numerical and experimental studies G. Couerbe a, D.F. Fletcher b, C. Xuereb a, M. Poux a,∗ a Universit e´ de Toulouse, Laboratoire de G enie´ Chimique, CNRS/INP/UPS, 5 rue Paulin Talabot, BP 1301, 31106 Toulouse Cedex, France b School of Chemical and Biomolecular Engineering, The University of Sydney, NSW 2006, Australia abstract Agitation of a thixotropic shear•thinning fluid exhibiting a yield stress is investigated both experimentally and via simulations. Steady•state experiments are conducted at three 1 impeller rotation rates (1, 2 and 8 s − ) for a tank stirred with an axial•impeller and flow•field measurements are made using particle image velocimetry (PIV) measurements. Three• dimensional numerical simulations are also performed using the commercial CFD code Keywords: ANSYS CFX10.0. The viscosity of the suspension is determined experimentally and is mod• Thixotropy elled using two shear•dependant laws, one of which takes into account the flow instabilities CFD of such fluids at low shear rates. At the highest impeller speed, the flow exhibits the famil• PIV iar outward pumping action associated with axial•flow impellers. However, as the impeller Stirred tank speed decreases, a cavern is formed around the impeller, the flow generated in the vicin• Impeller ity of the agitator reorganizes and its pumping capacity vanishes. An unusual flow pattern, Mixing where the radial velocity dominates, is observed experimentally at the lowest stirring speed. It is found to result from wall slip effects. -

Rheology in Pharmaceutical Formulations-A Perspective
evelo f D pin l o g a D Mastropietro et al., J Develop Drugs 2013, 2:2 n r r u u g o s J Journal of Developing Drugs DOI: 10.4172/2329-6631.1000108 ISSN: 2329-6631 Review Article Open Access Rheology in Pharmaceutical Formulations-A Perspective David J Mastropietro1, Rashel Nimroozi2 and Hossein Omidian1* 1Department of Pharmaceutical Sciences, College of Pharmacy, Nova Southeastern University, Fort Lauderdale, Florida, USA 2Westside Regional Medical Center, Pharmacy Department, Plantation, Florida, USA Abstract Medications produced as semi-solids type product such as creams, ointments and lotions are based on emulsion or suspension type systems consisting of two or more incompatible materials. In order to be manufactured, these dosage forms need specific flow properties so they can be placed into a container, remain stable over time, dispensed, handled and properly applied to the affected area by patients. Rheology is therefore crucially important as it will directly affect the way a drug is formulated and developed, the quality of the raw and finished product, the drug efficacy, the way a patient adheres to the prescribed drug, and the overall healthcare cost. It can be concluded that there are inherent and independent factors that affect the flow property of a medicated material during every stage of its manufacturing all the way to its use. Keywords: Pharmaceutical formulation; Rheology; Viscosity; dampened as the particles easily slide over one another to maintain a Suspensions; Rheology modifiers; Hydrophilic polymers steady viscosity, or Newtonian behavior. If stress is applied at a faster rate, the spherical particles slide faster over each other to maintain Introduction their history of viscosity. -

Pharmaceutics I صيدالنيات 1
Pharmaceutics I صيدﻻنيات 1 Unit 6 1 Rheology of suspensions • Rheology, the study of flow, addresses the viscosity characteristics of powders, fluids, and semisolids. • Materials are divided into two general categories, Newtonian and non-Newtonian, depending on their flow characteristics. • The unit of viscosity is the poise, the shearing force required to produce a velocity of 1 cm per second between two parallel planes of liquid, each 1 cm2 in area and separated by a distance of 1 cm. • The most convenient unit to use is the centipoise, or cP (equivalent to 0.01 poise). Newton’s law of flow • Newton law of flow relates parallel layers of liquid, with the bottom layer fixed, when a force is placed on the top layer, the top plane moves at constant velocity, each lower layer moves with a velocity directly proportional to its distance from the stationary bottom layer. • The velocity gradient, or rate of shear (dv/dr), is the difference of velocity dv between two planes of liquid separated by the distance dr. • The force (F´/A) applied to the top layer that is required to result in flow (rate of shear, G) is called the shearing stress (F). NEWTONIAN’S LOW OF FLOW Let us consider a block of liquid consisting of parallel plates of molecules as shown in the figure. The bottom layer is considered to be fixed in place. If the top plane of liquid is moved at constant velocity, each lower layer will move with a velocity directly proportional to its distance from the stationary bottom layer Representation of shearing force acting on a block of material ☻Rate of Shear dv/dr = G Is the velocity difference dv between two planes of liquid separated by an infinite distance dr. -

Dilatancy in the Flow and Fracture of Stretched Colloidal Suspensions
Dilatancy in the flow and fracture of stretched colloidal suspensions M.I. Smith School of Engineering, University of Edinburgh, Kings Buildings, Mayfield Rd, Edinburgh, EH9 3JL, UK School of Physics and Astronomy, University of Nottingham, University Park, Nottingham, NG7 2RD e-mail: [email protected] R. Besseling SUPA, School of Physics and Astronomy, University of Edinburgh, Kings Buildings, Mayfield Rd, Edinburgh EH9 3JZ e-mail: [email protected] M.E. Cates SUPA, School of Physics and Astronomy, University of Edinburgh, Kings Buildings, Mayfield Rd, Edinburgh, EH9 3JZ, UK e-mail: m.e.cates@ ed.ac.uk V. Bertola* School of Engineering, University of Edinburgh, Kings Buildings, Mayfield Rd, Edinburgh, EH9 3JL, UK e-mail: [email protected] contacting author* 1 Dilatancy in the flow and fracture of stretched colloidal suspensions. Concentrated particulate suspensions, commonplace in the pharmaceutical, cosmetic and food industries, display intriguing rheology. In particular, the dramatic increase in viscosity with strain rate (shear thickening and jamming) which is often observed at high volume fractions, is of strong practical and fundamental importance. Yet manufacture of these products and their subsequent dispensing often involves flow geometries substantially different from that of simple shear flow experiments. Here we show that the elongation and breakage of a filament of a colloidal fluid under tensile loading is closely related to the jamming transition seen in its shear rheology. However, the modified flow geometry reveals important additional effects. Using a model system with nearly hard-core interactions, we provide evidence of surprisingly strong viscoelasticity in such a colloidal fluid under tension. -
Non-Newtonian Fluids Flow Characteristic of Non-Newtonian Fluid
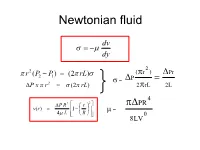
Newtonian fluid dv dy 2 r 2 (P P ) (2 rL) (r ) Pr 2 1 P 2 = P x r (2 rL) 2 rL 2L 2 4 P R2 r PR v(r) 1 4 L R = 8LV0 Definition of a Newtonian Fluid F du yx yx A dy For Newtonian behaviour (1) is proportional to and a plot passes through the origin; and (2) by definition the constant of proportionality, Newtonian dv dy 2 r 2 (P P ) (2 rL) (r ) Pr 2 1 P 2 = P x r (2 rL) 2 rL 2L 2 4 P R2 r PR v(r) 1 4 L R = 8LV0 Newtonian 2 From (r ) Pr d u = P 2rL 2L d y 4 and PR 8LQ = 0 4 8LV P = R = 8v/D 5 6 Non-Newtonian Fluids Flow Characteristic of Non-Newtonian Fluid • Fluids in which shear stress is not directly proportional to deformation rate are non-Newtonian flow: toothpaste and Lucite paint (Casson Plastic) (Bingham Plastic) Viscosity changes with shear rate. Apparent viscosity (a or ) is always defined by the relationship between shear stress and shear rate. Model Fitting - Shear Stress vs. Shear Rate Summary of Viscosity Models Newtonian n ( n 1) Pseudoplastic K n Dilatant K ( n 1) n Bingham y 1 1 1 1 Casson 2 2 2 2 0 c Herschel-Bulkley n y K or = shear stress, º = shear rate, a or = apparent viscosity m or K or K'= consistency index, n or n'= flow behavior index Herschel-Bulkley model (Herschel and Bulkley , 1926) n du m 0 dy Values of coefficients in Herschel-Bulkley fluid model Fluid m n Typical examples 0 Herschel-Bulkley >0 0<n< >0 Minced fish paste, raisin paste Newtonian >0 1 0 Water,fruit juice, honey, milk, vegetable oil Shear-thinning >0 0<n<1 0 Applesauce, banana puree, orange (pseudoplastic) juice concentrate Shear-thickening >0 1<n< 0 Some types of honey, 40 % raw corn starch solution Bingham Plastic >0 1 >0 Toothpaste, tomato paste Non-Newtonian Fluid Behaviour The flow curve (shear stress vs. -

Complex Fluids in Energy Dissipating Systems
applied sciences Review Complex Fluids in Energy Dissipating Systems Francisco J. Galindo-Rosales Centro de Estudos de Fenómenos de Transporte, Faculdade de Engenharia da Universidade do Porto, CP 4200-465 Porto, Portugal; [email protected] or [email protected]; Tel.: +351-925-107-116 Academic Editor: Fan-Gang Tseng Received: 19 May 2016; Accepted: 15 July 2016; Published: 25 July 2016 Abstract: The development of engineered systems for energy dissipation (or absorption) during impacts or vibrations is an increasing need in our society, mainly for human protection applications, but also for ensuring the right performance of different sort of devices, facilities or installations. In the last decade, new energy dissipating composites based on the use of certain complex fluids have flourished, due to their non-linear relationship between stress and strain rate depending on the flow/field configuration. This manuscript intends to review the different approaches reported in the literature, analyses the fundamental physics behind them and assess their pros and cons from the perspective of their practical applications. Keywords: complex fluids; electrorheological fluids; ferrofluids; magnetorheological fluids; electro-magneto-rheological fluids; shear thickening fluids; viscoelastic fluids; energy dissipating systems PACS: 82.70.-y; 83.10.-y; 83.60.-a; 83.80.-k 1. Introduction Preventing damage or discomfort resulting from any sort of external kinetic energy (impact or vibration) is an omnipresent problem in our society. On one hand, impacts and vibrations are responsible for several health problems. According to the European Injury Data Base (IDB), injuries due to accidents are killing one EU citizen every two minutes and disabling many more [1]. -

Non-Newtonian Fluid Math Dean Wheeler Brigham Young University May 2019
Non-Newtonian Fluid Math Dean Wheeler Brigham Young University May 2019 This document summarizes equations for computing pressure drop of a power-law fluid through a pipe. This is important to determine required pumping power for many fluids of practical importance, such as crude oil, melted plastics, and particle/liquid slurries. To simplify the analysis, I will assume the use of smooth and relatively long pipes (i.e. neglect pipe roughness and entrance effects). I further assume the reader has had exposure to principles taught in a college-level fluid mechanics course. Types of Fluids To begin, one must understand the difference between Newtonian and non-Newtonian fluids. There are many types of non-Newtonian fluids and this is a vast topic, which is studied under a branch of physics known as rheology. Rheology concerns itself with how materials (principally liquids, but also soft solids) flow under applied forces. Some non-Newtonian fluids exhibit time-dependent or viscoelastic behavior. This means their flow behavior depends on the history of what forces were applied to the fluid. Such fluids include thixotropic (shear-thinning over time) and rheopectic (shear-thickening over time) types. Viscoelastic fluids exhibit elastic or solid-like behavior when forces are first applied, and then transition to viscous flow under continuing force. These include egg whites, mucous, shampoo, and silly putty. We will not be analyzing any of these time-dependent fluids in this discussion. Time-independent or inelastic fluids flow with a constant rate when constant forces are applied to them. They are the focus of this discussion. -

Characteristics of Stratified Flows of Newtonian/Non-Newtonian Shear- Thinning Fluids
Characteristics of stratified flows of Newtonian/non-Newtonian shear- thinning fluids Davide Picchia*, Pietro Poesiob, Amos Ullmanna and Neima Braunera a Tel-Aviv University, Faculty of Engineering, School of Mechanical Engineering Ramat Aviv, Tel-Aviv, 69978, Israel b Università degli Studi di Brescia, Dipartimento di Ingegneria Meccanica ed Industriale, Via Branze 38, 25123,Brescia, Italy [email protected] , [email protected], [email protected], [email protected] Abstract Exact solutions for laminar stratified flows of Newtonian/non-Newtonian shear-thinning fluids in horizontal and inclined channels are presented. An iterative algorithm is proposed to compute the laminar solution for the general case of a Carreau non- Newtonian fluid. The exact solution is used to study the effect of the rheology of the shear-thinning liquid on two-phase flow characteristics considering both gas/liquid and liquid/liquid systems. Concurrent and counter-current inclined systems are investigated, including the mapping of multiple solution boundaries. Aspects relevant to practical applications are discussed, such as the insitu hold-up, or lubrication effects achieved by adding a less viscous phase. A characteristic of this family of systems is that, even if the liquid has a complex rheology (Carreau fluid), the two-phase stratified flow can behave like the liquid is Newtonian for a wide range of operational conditions. The capability of the two-fluid model to yield satisfactory predictions in the presence of shear-thinning liquids is tested, and an algorithm is proposed to a priori predict if the Newtonian (zero shear rate viscosity) behaviour arises for a given operational conditions in order to avoid large errors in the predictions of flow characteristics when the power-law is considered for modelling the shear-thinning behaviour. -

Magnetorheological Fluid, Apparent Viscosity, Yield Stress
American Journal of Polymer Science 2012, 2(4): 50-55 DOI: 10.5923/j.ajps.20120204.01 Magneto Mechanical Properties of Iron Based MR Fluids S. Elizabeth Premalatha1,2, R. Chokkalingam1, M. Mahendran1,* 1Smart Materials Lab, Department Physics, Thiagarajar College of Engineering, Madurai, 625015, India 2Department of Physics, Sri S. Ramasamy Naidu Memorial College, Sattur, 626203, India Abstract The main aim of this article is to prepare MR fluids, composed of iron particles and analyse their flow behaviour in terms of the internal structure, stability and magneto rheological properties. MR fluids are prepared using silicone oil (OKs) mixed with iron powder. To reduce sedimentation, grease is added as stabilizers. The size of the particles is observed by Optical microscope and flow properties are examined by rheometer. Sedimentation is measured by simple observation of changes in boundary position between clear and turbid part of MR fluid placed into glass tube. The various additive percentages can also influence the MR fluid’s performances. Keywords Magnetorheological Fluid, Apparent Viscosity, Yield Stress When the field is cut off, the MR fluid comes to original 1. Introduction state.MR fluid behave like Newton fluid in zero magnetic field. When certain amount of magnet field is applied, the Using some standard materials, science and technology magnetic particles form chain cluster due to dipole-dipole have made amazing development in the design of electronics interaction between particles[7-12]. The important and machinery. Such materials have the ability to change characteristics of the magnetically active dispersed phase are their shape or size by adding a little bit of heat or to change particle size, shape, density, particle size distribution, from the liquid to a solid when this material is near to a saturation magnetization and coercive field [13] Other than magnet. -

A Basic Introduction to Rheology
WHITEPAPER A Basic Introduction to Rheology RHEOLOGY AND Introduction VISCOSITY Rheometry refers to the experimental technique used to determine the rheological properties of materials; rheology being defined as the study of the flow and deformation of matter which describes the interrelation between force, deformation and time. The term rheology originates from the Greek words ‘rheo’ translating as ‘flow’ and ‘logia’ meaning ‘the study of’, although as from the definition above, rheology is as much about the deformation of solid-like materials as it is about the flow of liquid-like materials and in particular deals with the behavior of complex viscoelastic materials that show properties of both solids and liquids in response to force, deformation and time. There are a number of rheometric tests that can be performed on a rheometer to determine flow properties and viscoelastic properties of a material and it is often useful to deal with them separately. Hence for the first part of this introduction the focus will be on flow and viscosity and the tests that can be used to measure and describe the flow behavior of both simple and complex fluids. In the second part deformation and viscoelasticity will be discussed. Viscosity There are two basic types of flow, these being shear flow and extensional flow. In shear flow fluid components shear past one another while in extensional flow fluid component flowing away or towards from one other. The most common flow behavior and one that is most easily measured on a rotational rheometer or viscometer is shear flow and this viscosity introduction will focus on this behavior and how to measure it. -

Liquid Body Armor
Liquid Body Armor Organization: Children's Museum of Houston Contact person: Aaron Guerrero Contact information: [email protected] or 713‐535‐7226 General Description Type of program: Cart Demo Visitors will learn how nanotechnology is being used to create new types of protective fabrics. The classic experiment “Oobleck” is used to demonstrate how scientists are using similar techniques to recreate this phenomenon in flexible fabrics. Program Objectives Big idea: Nanotechnology can be used to create new protective fabrics with unique properties. Learning goals: As a result of participating in this program, visitors will be able to: 1. Explore and learn about the molecular behavior which gives Oobleck its unique properties. 2. Learn how nanotechnologists and material researchers are applying these properties to protective fabrics. NISE Network content map main ideas: [ ] 1. Nanometer‐sized things are very small, and often behave differently than larger things do. [ X ] 2. Scientists and engineers have formed the interdisciplinary field of nanotechnology by investigating properties and manipulating matter at the nanoscale. [ X ] 3. Nanoscience, nanotechnology, and nanoengineering lead to new knowledge and innovations that weren’t possible before. [ ] 4. Nanotechnologies have costs, risks, and benefits that affect our lives in ways we cannot always predict. 1 National Science Education Standards: 2. Physical Science [X] K‐4: Properties of objects and materials [ ] K‐4: Position and motion of objects [ ] K‐4: Light, heat, electricity, and magnetism [X] 5‐8: Properties and changes of properties in matter [X] 5‐8: Motions and forces [X] 5‐8: Transfer of energy [X] 9‐12: Structure of atoms [X] 9‐12: Structure and properties of matter [ ] 9‐12: Chemical reactions [X] 9‐12: Motions and force [ ] 9‐12: Conservation of energy and increase in disorder [X] 9‐12: Interactions of energy and matter 5.