Implementation of Dynamic Range Controller on Digital Signal Processor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
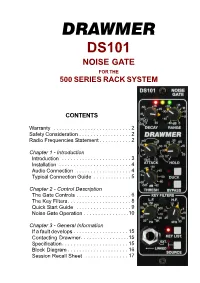
Ds101 Noise Gate for the 500 Series Rack System
DRAWMER DS101 NOISE GATE FOR THE 500 SERIES RACK SYSTEM CONTENTS Warranty . 2 Safety Consideration . 2 Radio Frequencies Statement . 2 Chapter 1 - Introduction Introduction . 3 Installation . 4 Audio Connection . 4 Typical Connection Guide . 5 Chapter 2 - Control Description The Gate Controls . 6 The Key Filters . 8 Quick Start Guide . 9 Noise Gate Operation . .10 Chapter 3 - General Information If a fault develops. 15 Contacting Drawmer . .15 Specification. 15 Block Diagram. 16 Session Recall Sheet . 17 DRAWMER COPYRIGHT This manual is copyrighted © 2012 by Drawmer Electronics Ltd. With all rights reserved. Under copyright laws, no part of this publication may be reproduced, transmitted, stored in a retrieval system or translated into any language in any form by any means, mechanical, optical, electronic, recording, or otherwise, without the written permission of Drawmer Electronics Ltd. ONE YEAR LIMITED WARRANTY Drawmer Electronics Ltd., warrants the Drawmer DS101 Noise Gate For the USA to conform substantially to the specifications of this manual for a period of one year from the original date of purchase when used in FEDERAL COMMUNICATIONS COMMISSION RADIO accordance with the specifications detailed in this manual. In the FREQUENCY INTERFERENCE STATEMENT case of a valid warranty claim, your sole and exclusive remedy and This equipment has been tested and found to comply with the limits Drawmer’s entire liability under any theory of liability will be to, at for a Class B digital device, pursuant to Part 15 of the FCC Rules. Drawmer’s discretion, repair or replace the product without charge, These limits are designed to provide reasonable protection against or, if not possible, to refund the purchase price to you. -

User's Manual
USER’S MANUAL G-Force GUITAR EFFECTS PROCESSOR IMPORTANT SAFETY INSTRUCTIONS The lightning flash with an arrowhead symbol The exclamation point within an equilateral triangle within an equilateral triangle, is intended to alert is intended to alert the user to the presence of the user to the presence of uninsulated "dan- important operating and maintenance (servicing) gerous voltage" within the product's enclosure that may instructions in the literature accompanying the product. be of sufficient magnitude to constitute a risk of electric shock to persons. 1 Read these instructions. Warning! 2 Keep these instructions. • To reduce the risk of fire or electrical shock, do not 3 Heed all warnings. expose this equipment to dripping or splashing and 4 Follow all instructions. ensure that no objects filled with liquids, such as vases, 5 Do not use this apparatus near water. are placed on the equipment. 6 Clean only with dry cloth. • This apparatus must be earthed. 7 Do not block any ventilation openings. Install in • Use a three wire grounding type line cord like the one accordance with the manufacturer's instructions. supplied with the product. 8 Do not install near any heat sources such • Be advised that different operating voltages require the as radiators, heat registers, stoves, or other use of different types of line cord and attachment plugs. apparatus (including amplifiers) that produce heat. • Check the voltage in your area and use the 9 Do not defeat the safety purpose of the polarized correct type. See table below: or grounding-type plug. A polarized plug has two blades with one wider than the other. -
Using Equalization on HF SSB
Using Equalization on HF SSB Bill Leonard NØCU 4/27/2010 1 Topics: •Some Commonly Used Methods for Improving HF SSB Comms •Some key points about speech and hearing •The W2IHY 8 Band Equalizer + Noise Gate •What is it •When to use it •Where to use it •How to use it •What it can, and cannot do 4/27/2010 2 What is “communication”? •Communication Transfer of Information •What is “information transfer”? •CW •Digital comms •SSB Voice Different modes require different •Rag-chew methods to optimize information transfer •Breaking DX pile-ups •FM Voice 4/27/2010 3 What can we do to improve our ability to communicate via HF SSB? Typical communication path Processor Voice Mic EQ Xmtr Rcvr EQ Spkr Ear (Brain) .. .. Typical Why Not Here? Location 4/27/2010 4 Some Commonly Used Methods for Improving HF SSB Comms: 1. Improve received SNR: •Use higher gain antennas •Use higher peak transmitter power •Raise average transmit power (compression) •There is a limit: trade-off between distortion vs. SNR improvement •Some (W2IHY) claim that straight compression can degrade transmit SNR •I question this claim (all limiters exhibit “small signal suppression”) •Compression will increase background noise when no speech signal is present •Use of a Noise Gate should mitigate this problem •“Matched Filter” detection: •“Matching” filters means more than just reducing bandwidth arbitrarily •There is a limit: trade-off between distortion vs. SNR improvement •A 10 Hz filter won’t work very well with a 60 wpm CW signal •Reducing receiver noise figure will not help when atmospheric noise is dominant 4/27/2010 5 Some Commonly Used Methods for Improving HF SSB Comms (continued): 1. -
Download PDF of This Issue
build a Ital transposer TIGER .01 Introduced three years ago, our "Tiger .01" is still one of the finest amplifiers available in its power class. This amplifier introduced our 100% complementary circuit which has become a standard feature in many of the better amplifiers. This combined with an output triple produces a circuit that can honestly be rated as having less than .01% IM distortion at any level up to 60 Watts. Relatively low open loop gain and a conservative amount of negative feedback results in clean overload charac teristics and good TIM characteristics. Other features are volt-amp output limiting, plus three fuses and an overheat thermostat. Despite the "budget” price an output meter is standard equipment. Each channel measures 4% x 5 x 14. Four will mount in a stan dard width relay rack for four channel systems. SPECIFICATIONS 60 Watts—4.0 or 8.0 Ohm load Minimum RMS from 20 Hz to 20 KHz with less than .05% Total Harmonic Distortion. IM Distortion .................................................................... less than .01% Damping Factor . ...................... 50 or greater 20 Hz to20,000 Hz. Southwest Technical Products Corp. Hum and N o is e .....................................................................................-90 dB 219 W. Rhapsody, Dept. FM -# 20 7 /B Am plifier (single ch an n e l)..............................$ 1 10.0 0 PPd San Antonio, Texas 78216 # 207/B Amplifier — K it ....................................................$ 77 .50 PPd Would you believe a high quality preamp and control center for less than $75.00?? Well it's true. With a few hours work you can assemble our #198 preamp kit and have a unit equal to, or superior to products costing three, or four times this amount. -
G3 Operation Manual (17 MB Pdf)
OPERATION MANUAL Thank you very much for purchasing the ZOOM . Please read this manual carefully to learn about all the functions of the so that you will be able to use it fully for a long time. Keep this manual in a convenient place for reference when necessary. Contents Usage and safety precautions .......................2 Using Rhythms ............................................24 Introduction ...................................................3 Using the Looper .........................................26 Terms Used in This Manual ............................3 Updating the firmware .................................30 Part Names ....................................................4 Restoring the to its factory default settings. .......................................31 Turn the power on and play ...........................6 Using Audio Interface Functions .......................32 Adjusting effects ............................................8 Effect Types and Parameters .......................33 Selecting Patches ........................................ 10 Troubleshooting ...........................................49 Storing Patches ............................................ 12 Specifications ..............................................50 Setting specific patch parameters ............... 14 Rhythm List .................................................51 Changing Various Settings ........................... 18 Using the Tuner ............................................22 © ZOOM CORPORATION Copying or reproduction of this document -
HUSH Super C Manual 2005.Pmd
1 Your HUSH® Super C noise reduction system has been tested and complies with the following Standards and Directives as set forth by the European Union: Council Directive(s): 89/336/EEC Electromagnetic Compatibility Standard(s): EN55013, EN50082-1 This means that this product has been designed to meet stringent guidelines on how much RF energy it can emit, and that it should be immune from other sources of interference when properly used. Improper use of this equipment could result in increased RF emissions, which may or may not interfere with other electronic products. To insure against this possibility, always use good shielded cables for all audio input and output connections. Also, bundle audio cables separately from the AC power cables. These steps will help insure compliance with the Directive(s). For more information about other Rocktron products, please see your local dealer or one of our importers closest to you (listed on the enclosed warranty sheet). Contents Introduction .................................................................... 3 Super C Front Panel ...................................................... 4 Super C Rear Panel ....................................................... 5 System Connections ...................................................... 6 Mono Applictions ............................................................ 6 Stereo Applictions ............................................................ 7 Guitar Combo Amp Connection........................................ 8 Guitar Amp Head Connection .......................................... -

Master Fader 5.2 Release Notes
RELEASE NOTES Mackie Master Fader App V5.2 • August 2020 Introduction These release notes describe changes and upgrades to the Mackie NOTE: If using a Static IP address for your DL Series Mixer, Master Fader app and DL Series mixer firmware since Version 5.1.1. an update may fail to begin properly. Similarly, a force update will fail in the same way. If either of these happen, you will need to temporarily New Master Fader app releases may be downloaded and installed configure the DL hardware to use Dynamic IP addressing. directly from the Play Store (Android device) or the App Store (iOS device). You may also get Master Fader for Windows and macOS from: This can be accomplished by changing to Dynamic IP, disconnecting https://mackie.com/products/master-fader-control-app the hardware from the main network, then configuring a temporary Wi-Fi network with a router directly connected to the DL hardware Be sure to perform a full System Backup of Master Fader – Tools > with no other network connections. When the update is complete, Settings – before downloading the app. change the DL hardware back to static IP and connect it back to the main network. NOTE: Updating the DC16’s firmware requires an iPad plugged into the iPad control port on the rear of the DC16 (although DL32R may be updated by any Master Fader supported device over Wi-Fi). NOTE: By default, apps update automatically on iOS and Android. We strongly recommend that you disable automatic updates for apps. Otherwise you run the risk of a long update occurring right in the middle of a show. -

Logic Studio Effects Copyright © 2009 Apple Inc
Logic Studio Effects Copyright © 2009 Apple Inc. All rights reserved. Note: Because Apple frequently releases new versions and updates to its system software, applications, and Your rights to the software are governed by the Internet sites, images shown in this manual may be slightly accompanying software license agreement. The owner or different from what you see on your screen. authorized user of a valid copy of Logic Studio software may reproduce this publication for the purpose of learning Apple to use such software. No part of this publication may be 1 Infinite Loop reproduced or transmitted for commercial purposes, such Cupertino, CA 95014 as selling copies of this publication or for providing paid 408-996-1010 for support services. www.apple.com The Apple logo is a trademark of Apple Inc., registered in Apple, the Apple logo, GarageBand, Logic, Logic Studio, the U.S. and other countries. Use of the “keyboard” Apple Macintosh, MainStage, and WaveBurner are trademarks logo (Shift-Option-K) for commercial purposes without of Apple Inc., registered in the U.S. and other countries. the prior written consent of Apple may constitute trademark infringement and unfair competition in violation Finder is a trademark of Apple Inc. of federal and state laws. Other company and product names mentioned herein Every effort has been made to ensure that the information are trademarks of their respective companies. Mention of in this manual is accurate. Apple is not responsible for third-party products is for informational purposes only printing or clerical errors. and constitutes neither an endorsement nor a recommendation. Apple assumes no responsibility with regard to the performance or use of these products. -
Manual Channel One Model 9945
Manual Model 9945 Channel Strip Manual Channel One Model 9945 Version 1.1 - 5/2000 R & D: Ruben Tilgner The information in this document has been carefully verified and is assumed to be correct. However Sound Performance Lab (SPL) reserves the right to modify the product described in this manual at any time. Changes without notice.This document is the property of SPL and may not be copied or reproduced in any manner,in part or full without the authorisation of SPL. Limitations of Liability: In no event will SPL be liable for any damages, including loss of data, lost profits, cost of cover or other special, incidental, consequential or indirect damages arising from the use of the unit,however caused and on any theory of liability. This limitation will apply even if SPL or an authorised dealer has been advised of the possibility of such damage. Sound Performance Lab P.O.Box 12 27 D- 41368 Niederkruechten, Germany Phone +49 - 21 63 / 98 34-0 Fax +49 - 21 63 / 98 34-20 eMail: [email protected] www.soundperformancelab.com © 2000 SPL electronics GnbH. All Rights Reserved. Subject to change without notice. 2 Contents Introduction ................................................................................................................... 4 Principles ......................................................................................................................... 4 Hookup ............................................................................................................................. 5 Connections: Rear front -

NCH Software Voxal Voice Changer
NCH Software Voxal Voice Changer This user guide has been created for use with Voxal Voice Changer Version 6.xx ©NCH Software Technical Support If you have difficulties using Voxal Voice Changer please read the applicable topic before requesting support. If your problem is not covered in this user guide please view the up-to-date Voxal Voice Changer Online Technical Support at www.nchsoftware.com/voicechanger/support.html . If that does not solve your problem, you can contact us using the technical support contacts listed on that page. Software Suggestions If you have any suggestions for improvements to Voxal Voice Changer, or suggestions for other related software that you might need, please post it on our Suggestions page at www.nch.com.au/suggestions/index.html. Many of our software projects have been undertaken after suggestions from users like you. You get a free upgrade if we follow your suggestion. Voxal Voice Changer Contents Introduction..................................................................................................................................... 2 Getting Started................................................................................................................................ 3 Building and Editing Voices............................................................................................................ 4 Creating a New Voice..................................................................................................................... 5 Import/Export voice........................................................................................................................ -
TH-U User Manual
USER MANUAL v. 1.0.0 OVERLOUD USER MANUAL ! INTRODUCTION __________________________1 Thank you! ________________________________________________1 Cool Features ______________________________________________1 Disclaimer ________________________________________________1 ABOUT TH-U ___________________________2 The User Interface __________________________________________2 Tools ____________________________________________________2 Tuner 2 Looper 2 GETTING STARTED _______________________3 Create your User Account _____________________________________3 Authorize TH-U _____________________________________________3 De-Authorize TH-U __________________________________________4 Authorization Limits _________________________________________4 Run TH-U _________________________________________________4 Presets 4 The Sound Chain View 4 About TH-U Components 5 Components 6 TH-U Top Panel _____________________________________________7 Input Level Adjustment 7 Master 7 Live Mode 8 Tuner 8 BPM 9 Input and Output Level Meters 9 Looper 10 TH-U Top Bar _____________________________________________11 SETTINGS 11 MIDI 13 AUTO (Automation) 14 MANUAL 15 INFO 15 UNDO/REDO 15 How to work with TH-U ______________________________________16 Insert a component 16 OVERLOUD USER MANUAL ! Move a component 16 Remove a component 16 Create a new setup from scratch _______________________________17 Inserting a Stomp Box 17 Inserting an Amplifier 19 Tweaking an Amp head 20 Inserting a Rig Player 21 Inserting a Cabinet 23 Inserting a Rack Effect 28 Parallel Sound Chain ________________________________________29 -

Dynamics Processors
RaneNote DYNAMICS PROCESSORS Dynamics Processors — Technology 1. Dynamics Processors Basics 2 2. Basic Compressors 4 Broadband Compression 4 Compressor Uses 5 3. Side-Chain Controls 6 Dynamics Processors — Threshold 6 Ratio 6 Technology & Gain 6 Application Tips Attack 6 Release 7 Knee 7 4. Specialized Compressors 9 Frequency Sensitive Compression 9 Split-Band Compression 9 Dynamic EQ 10 Relative Threshold Dynamic EQ 10 De-essers 11 Automatic Gain Control (AGC) 12 Peak Limiter 13 5. Expanders, Gates & Duckers 14 Expanders 14 Gates 15 Duckers 18 6. All Together Now … The Big Picture 19 7. Special-Purpose Dynamics Processors 20 Feedback Suppressors 20 Levelers (or Ambient Noise Compensators) 21 Exciters & Enhancers 21 Dynamics Processors — Application Tips 8. Compressor & Peak Limiter Application Tips 22 Controlling Live Sound Levels 22 Vocals, Bass, Guitar & Drums 22 Suggested Compressor Settings Chart 23 Rick Jeffs 9. Split-Band Processing 24 Scott Holden Guitar, Bass & Recording 25 Dennis Bohn 10. Dynamic EQ Applications Beyond De-essing 26 Rane Corporation Auto-Correct Microphone Proximity Effect 26 Auto-EQ Changing Sound Sources 26 RaneNote 155 Improve Vocals 26 © 2005 Rane Corporation Create Radical Sounds 26 Appendix Compressor & Expander History Note 27 Dynamics Processors-1 Dynamics Processors — Technology Chapter 1 — Dynamics Processors Basics The dynamic range of an audio passage is the ratio the input circuits, on to the gain control device and of the loudest signal to the quietest signal. For signal then exits through the output circuits (or the digital processors the magnitude of the power supply voltages equivalent of this path). Thus, the signal chain goes restricts the maximum output signal and the noise through the “volume control” in the “hand on a con- floor determines the minimum output signal.