CALLUM Linear Transmitter - Architecture and Circuit Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
HF Linear Amplifiers
- • - • --• --•• • •••- • --••• - • ••• •- • HFHF LinearLinear AmplifiersAmplifiers Basic amplifier concepts, types & operation Adam Farson VA7OJ Tube Amplifiers Solid-State Amplifiers 1 October 2005 NSARC HF Operators – HF Amplifiers 1 BasicBasic LinearLinear AmplifierAmplifier RequirementsRequirements - • - • --• --•• • •••- • --••• - • ••• •- • ! Amplify the exciter’s RF output (by 10 dB or more). ! Provide a means of correct matching to load. ! Amplify complex signals such as SSB with minimum distortion (maximum linearity). ! Transmit a spectrally-pure signal. ! Assure a safe operating environment. 1 October 2005 NSARC HF Operators – HF Amplifiers 2 BasicBasic AmplifierAmplifier TypesTypes - • - • --• --•• • •••- • --••• - • ••• •- • ! Tube, grounded-grid triode (cathode-driven) – most popular. Some designs use tetrodes. ! Tube, grounded-cathode tetrode (grid-driven) – less common, but growing in popularity. ! Solid-state, BJT (junction transistors) – 500W or 1 kW. ! Solid-state, MOSFET – typically 1 kW. 1 October 2005 NSARC HF Operators – HF Amplifiers 3 Grounded-Grid Triode Amplifier showing pi-section input & output networks - • - • --• --•• • •••- • --••• - • ••• •- • Input network: C1-L1-C2 Plate feed circuit: RFC2-C5 Output network: C6-L2-C7 Plate tuning: C6 Loading: C7 Input impedance of grounded-grid triode amplifier Is low, complex, and also non-linear (decreases at onset of grid current). Tuned input network tunes out reactive (C) component, and also linearizes tube input impedance via flywheel effect. Cathode choke RFC1 provides DC return path for plate feed, and allows cathode to “float” at RF potential. Heater (or filament of directly-heated tube) powered via bifilar RF choke. Pi-output network matches tube load resistance to antenna, RF drive power added to output. Amplifier can operate in Class AB1 (no grid current) or AB2 (some grid current). 1 October 2005 NSARC HF Operators – HF Amplifiers 4 TubesTubes forfor GroundedGrounded--GridGrid AmplifiersAmplifiers - • - • --• --•• • •••- • --••• - • ••• •- • • Directly-heated glass triode (e.g. -

High Efficiency Power Amplifier for High Frequency Radio Transmitters
High Efficiency Power Amplifier for High Frequency Radio Transmitters M.Vasic, 0. Garcia, J.A. Oliver, P. Alou, D. Diaz, J.A. A.Gimeno, J.M.Pardo, C.Benavente, F.J.Ortega Cobos Radio Engineering Group (GIRA) Centra de Electronica Industrial (CEI) Universidad Politecnica de Madrid Universidad Politecnica de Madrid Madrid, Spain Madrid, Spain [email protected] Abstract— Modern transmitters usually have to amplify and One of the techniques that offer high efficiency and high transmit complex communication signals with simultaneous linearity is the Kahn's technique or Envelope Elimination and envelope and phase modulation. Due to this property of the Restoration (EER) technique [3]. This method proposes transmitted signal, linear power amplifiers (class A, B or AB) linearization of highly efficient, but nonlinear power amplifier are usually employed as a solution for the power amplifier stage. (class E or D) by modulation of its supply voltage. The These amplifiers have high linearity, but suffer from low modulation of the supply voltage is done through an envelope efficiency when the transmitted signal has high peak-to-average amplifier according to the reference signal that is proportional power ratio. The Kahn envelope elimination and restoration (EER) technique is used to enhance efficiency of RF to the envelope of the transmitted signal, while the phase transmitters, by combining highly efficient, nonlinear RF modulation of the transmitted signal is conducted through the amplifier (class D or E) with a highly efficient envelope amplifier nonlinear amplifier. The basis for EER is the equivalence of in order to obtain linear and highly efficient RF amplifier. -

Class D Audio Amplifier Basics
Application Note AN-1071 Class D Audio Amplifier Basics By Jun Honda & Jonathan Adams Table of Contents Page What is a Class D Audio Amplifier? – Theory of Operation..................2 Topology Comparison – Linear vs. Class D .........................................4 Analogy to a Synchronous Buck Converter..........................................5 Power Losses in the MOSFETs ...........................................................6 Half Bridge vs. Full Bridge....................................................................7 Major Cause of Imperfection ................................................................8 THD and Dead Time ............................................................................9 Audio Performance Measurement........................................................10 Shoot Through and Dead Time ............................................................11 Power Supply Pumping........................................................................12 EMI Consideration: Qrr in Body Diode .................................................13 Conclusion ...........................................................................................14 A Class D audio amplifier is basically a switching amplifier or PWM amplifier. There are a number of different classes of amplifiers. This application note takes a look at the definitions for the main classifications. www.irf.com AN-1071 1 AN-1071 What is a Class D Audio Amplifier - non-linearity of Class B designs is overcome, Theory of Operation without the inefficiencies -

Eimac Care and Feeding of Tubes Part 3
SECTION 3 ELECTRICAL DESIGN CONSIDERATIONS 3.1 CLASS OF OPERATION Most power grid tubes used in AF or RF amplifiers can be operated over a wide range of grid bias voltage (or in the case of grounded grid configuration, cathode bias voltage) as determined by specific performance requirements such as gain, linearity and efficiency. Changes in the bias voltage will vary the conduction angle (that being the portion of the 360° cycle of varying anode voltage during which anode current flows.) A useful system has been developed that identifies several common conditions of bias voltage (and resulting anode current conduction angle). The classifications thus assigned allow one to easily differentiate between the various operating conditions. Class A is generally considered to define a conduction angle of 360°, class B is a conduction angle of 180°, with class C less than 180° conduction angle. Class AB defines operation in the range between 180° and 360° of conduction. This class is further defined by using subscripts 1 and 2. Class AB1 has no grid current flow and class AB2 has some grid current flow during the anode conduction angle. Example Class AB2 operation - denotes an anode current conduction angle of 180° to 360° degrees and that grid current is flowing. The class of operation has nothing to do with whether a tube is grid- driven or cathode-driven. The magnitude of the grid bias voltage establishes the class of operation; the amount of drive voltage applied to the tube determines the actual conduction angle. The anode current conduction angle will determine to a great extent the overall anode efficiency. -

High-Frequency, High-Power Transistor Linear Power Amplifier Design
NPS ARCHIVE 1968 HUEBNER, R. HIGH-FREQUENCY, HIGH-POWER TRANSISTOR LINEAR POWER AMPLIFIER DESIGN by Ray Everett Huebner tIBRARY ^^ NAVAL POSTGRADUATE SCSwP,,. MONTEREY, CALIF.. 99040 UNITED STATES NAVAL POSTGRADUATE SCHOOL THESIS HIGH-FREQUENCY, HIGH-POWER TRANSISTOR LINEAR POWER AMPLIFIER DESIGN by Ray Everett Huebner September 1968 HIGH-FREQUENCY, HIGH-POWER TRANSISTOR LINEAR POWER AMPLIFIER DESIGN by Ray Everett Huebner Captain^ United States Marine Corps B,S,j Kansas State University, 1962 Submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE IN ELECTRICAL ENGINEERING from the NAVAL POSTGRADUATE SCHOOL September 1968 ABSTRACT This thesis discusses in detail the physical and elec- trical characteristics of high-frequency, high-power trans- istors, and why class B amplifiers are necessary for linear power amplification of signals containing more than one frequency. Linear power amplifier design is contingent upon hav- ing a suitable design technique. "Suitable" often means being able to determine parameter values called for by that technique. Conjugate impedance matching is a suitable technique and three of the four parameter values can be accurately determined. In some cases manufacturers pro- vide data for this technique, titled "Large-signal parame- TABLE OF CONTENTS Section Page I Introduction 9 II High-Frequency, High-Power Transistors 12 1. Theoretical Limitations 12 2. Physical Design 18 The Overlay Transistor 19 The Interdigitated Transistor 24 3. Some Notes on Second Breakdown 26 4. Advancing the State-of-the-Art 29 5. Characterization for Power Amplifier 38 Purposes III Linear Power Amplifier Design . 43 1. General Aspects 43 2. Preliminary Design Discussion 55 3. -

AN593: Broadband Linear Power Amplifiers
Freescale Semiconductor, Inc. Order this document MOTOROLA by AN593/D 33333SEMICONDUCTOR APPLICATION NOTE AN593 BROADBAND LINEAR POWER AMPLIFIERS USING PUSH-PULL TRANSISTORS Prepared by: Helge Granberg RF Circuits Engineering INTRODUCTION These transistors are specified at 80 watts (PEP) output with intermodulation distortion products (IMD) rated at – 30 dB. Linear power amplifier operation, as used in SSB For broadband linear operation, a quiescent collector current transmitters, places stringent distortion requirements on the of 60 – 80 mA for each transistor should be provided. Higher high-power stages. To meet these distortion requirements N . quiescent current levels will reduce fifth order IMD products, . and to attain higher power levels than can be generally . but will have little effect on third order products except at achieved with a single transistor, a push-pull output O lower power levels. Generally, third order distortion is much c configuration is often employed. Although parallel operation more significant than the fifth order products. n can often meet the power output demands, the push-pull I A biasing adjustment is provided in the amplifier circuit mode offers improved even-harmonic suppression making , to compensate for variations in transistor current gain. This r it the better choice. The exact amount of even-harmonic adjustment allows control of the idling current for both the suppression available with push-pull stages is highly o output and driver devices. This control is also useful if the t dependent on several factors, the most significant one being amplifier is operated from a supply other than 28 volts. c the matching between the two output devices. -
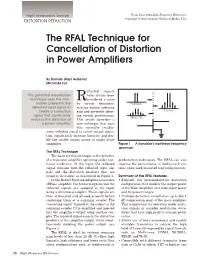
The RFAL Technique for Cancellation of Distortion in Power Amplifiers
High Frequency Design From June 2004 High Frequency Electronics Copyright © 2004, Summit Technical Media, LLC DISTORTION REDUCTION The RFAL Technique for Cancellation of Distortion in Power Amplifiers By Romulo (Ray) Gutierrez Micronda LLC eflected signals This patented linearization have always been technique uses the infor- Rconsidered a curse mation present in the by circuit designers, FORWARD reflected input signal to wasting energy, reducing create a correction gain and adversely affect- OUTPUT signal that significantly ing system performance. REFLECTED reduces the distortion of This article describes a a power amplifier new technique that uses this normally trouble- some reflected signal to cancel output distor- tion, significantly increase linearity, and dou- ble the usable output power of single stage amplifiers. Figure 1 · A transistor’s nonlinear frequency spectrum. The RFAL Technique The basis for this technique is the behavior of a transistor amplifier operating under non- predistortion techniques. The RFAL can also linear conditions. At the input, the reflected improve the performance of feedforward sys- signal contains both the reflected input sig- tems when used in nested loop configuration. nals and the distortion products that are found at its output, as illustrated in Figure 1. Summary of the RFAL features: In the Reflect Forward Adaptive Linearizer • Efficient low intermodulation distortion (RFAL) amplifier, the forward signals and the configuration that doubles the output power reflected signals are sampled at the input of the Main Amplifier over wide input power using a directional coupler. These signals are and frequency ranges. then attenuated and phased properly before • Provides distortion cancellation up to the 1 combining them at a summing coupler. -

Application Note Amplifier Distortion Measurements
Application Note Amplifier Distortion Measurements Draft #2 6/20/12 Roger Stenbock HF amplifier distortion measurements: Linear RF Power Amplifiers are used in a wide variety of ham radio stations. The output power of these linear amplifiers can range from a few watts to several thousand watts. The FCC regulation limits the maximum power to 1,500 peak envelope power (PEP). When properly adjusted properly and operating in their linear region, these amplifiers do exactly that, they amplify RF energy without adding any significant additional distortion products. However, if overdriven or not properly tuned, the potential distortion products can cause severe problems such as unintelligible modulation, RF power being transmitted out of band, thus causing interference with other radio communications. The interfering signals are the result of harmonic products and intermediation products – sometime referred to as “splatter”. Another byproduct of improper linear amplifier operation is inefficiency. Power that is not converted to a useful signal is dissipated as heat. Power Amplifiers that have low efficiency have high levels of heat dissipation, which could be a limiting factor in a particular design. This can have an adverse effect on the components, particularly the final output tubes or transistors. In the amateur radio service the control operator (i.e. ham) is responsible for ensuring that all emitted signals including RF linear power amplifiers are operated in accordance with do not exceed the maximum allowed distortion by the FCC. Instability Another undesirable amplifier phenomenon is instability. Instability in RF amplifiers may take the manifest themselves as oscillations at almost any frequency, and may damage or destroy the amplifying device. -
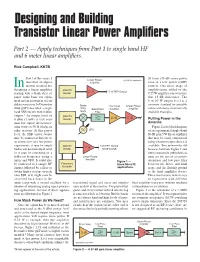
Designing and Building Transistor Linear Power Amplifiers
Designing and Building Transistor Linear Power Amplifiers Part 2 — Apply techniques from Part 1 to single band HF and 6 meter linear amplifiers. Rick Campbell, KK7B Part 1 of this series, I 20 times (13 dB) more power, described an experi- even in a low power (QRP) In mental method for contest. One more stage of designing a linear amplifier amplification added to the starting with a blank sheet of 0.25 W amplifier can overcome paper, some basic test equip- that 13 dB difference. The ment and an assortment of can- 5 to 10 W output level is a didate transistors. In December common standard for portable 2006 QST I described a single radios with many commercially band SSB exciter with 0 dBm available examples. output.1 An output level of 0 dBm (1 mW) is very com- Putting Power in the mon for signal interconnec- Antenna tions between 50 Ω blocks in Figure 2 is the block diagram radio systems. At this power of an experimental single-band level, the SSB exciter output 36 dB gain 5 W linear amplifier may be connected directly to that may be easily constructed an antenna for very low power using whatever output device is experiments, it may be ampli- available. Two noteworthy dif- fied to any desired output level ferences between Figure 2 and or it may be converted to a other commonly published cir- different frequency using a cuits are the use of a resistive mixer and VFO. It could also Figure 1 — attenuator and low-pass filter be connected to a simple RF Some MicroT2 between the driver and final clipper followed by a filter to applications. -
Linear Amplifier Basics; Biasing
6.012 - Microelectronic Devices and Circuits Lecture 17 - Linear Amplifier Basics; Biasing - Outline • Announcements Announcements - Stellar postings on linear amplifiers Design Problem - Will be coming out next week, mid-week. • Review - Linear equivalent circuits LECs: the same for npn and pnp; the same for n-MOS and p-MOS; all parameters depend on bias; maintaining a stable bias is critical • Biasing transistors Current source biasing Transistors as current sources Current mirror current sources and sinks • The mid-band concept Dealing with charge stores and coupling capacitors • Linear amplifiers Performance metrics: gains (voltage, current, power) input and output resistances power dissipation bandwidth Multi-stage amplifiers and two-port analysis Clif Fonstad, 11/10/09 Lecture 17 - Slide 1 The large signal models: A qAB q : Excess carriers on p-side plus p-n diode: IBS AB excess carriers on n-side plus junction depletion charge. B qBC C BJT: npn q : Excess carriers in base plus E- !FiB’ BE (in F.A.R.) iB’ B junction depletion charge B qBC: C-B junction depletion charge IBS qBE E D q : Gate charge; a function of v , MOSFET: qDB G GS qG v , and v . n-channel DS BS iD qDB: D-B junction depletion charge G B qSB: S-B junction depletion charge S qSB Clif Fonstad, 11/10/09 Lecture 17 - Slide 2 Reviewing our LECs: Important points made in Lec. 13 We found LECs for BJTs and MOSFETs in both strong inversion and sub-threshold. When vbs = 0, they all look very similar: in iin Cm iout out + + v in gi gmv in go v out C C - i o - common common Most linear circuits are designed to operate at frequencies where the capacitors look like open circuits. -
Week 4: Bipolar Junction Transistor
ELE 2110A Electronic Circuits Week 4: Bipolar Junction Transistor ELE2110A © 2008 Lecture 04 - 1 Topics to cover … z Physical Operation and I-V Characteristics z BJT Circuit Models z DC Analysis z BJT Biasing z Reading Assignment: Chap 5.1-5.3, 5.5-5.9, 5.11, 10.1-10.3 of Jaeger & Blalock, or Chap 5.1-5.5 of Sedra & Smith ELE2110A © 2008 Lecture 04 - 2 Bipolar Junction Transistor (BJT) z npn transistor: z 3 terminals: – emitter, base, and collector z 2 pn junctions: – emitter-base junction (EBJ) – collector-base junction (CBJ) z Emitter: heavily doped z Base: very thin Vertical npn ELE2110A © 2008 Lecture 04 - 3 Regions of Operation z Depends on the biasing across each of the junctions, different regions of operation are obtained: Base-Emitter Base-Collector Junction Junction Reverse Bias Forward Bias Forward Bias Forward-active region Saturation region (Active region) (Closed switch) (Good amplifier) Reverse Bias Cutoff region Reverse-active region (open switch) (Poor amplifier, rarely used) ELE2110A © 2008 Lecture 04 - 4 BJT in Active Region E-field 1 Biasing: 2 E-B: Forward 3 C-B: Reverse 4 Operation: 1. Forward bias of EBJ causes electrons to diffuse from emitter into base. 2. As base region is very thin, the majority of these electrons diffuse to the edge of the depletion region of CBJ, and then are swept to the collector by the electric field of the reverse-biased CBJ. 3. A small fraction of these electrons recombine with the holes in base region. 4. Holes are injected from base to emitter region. -
Lecture 14: More MOS Circuits and the Differential Amplifier
Lecture 14: More MOS Circuits and the Differential Amplifier Gu-Yeon Wei Division of Engineering and Applied Sciences Harvard University [email protected] Wei 1 Overview • Reading – S&S: Chapter 5.10, 6.1~2, 6.6 • Background – Having seen some of the basic amplifier circuits we can build with MOSFETs, conclude material in Chapter 5 of S&S by looking at the high- frequency model for MOSFETs. We will use this high-frequency model when analyzing the high-frequency operation of MOSFETs in amplifier circuits. The performance of amplifier circuits can be improved by using a differential pair topology. Differential pair amplifiers have two inputs – positive and negative terminals. The differential pair amplifier is what we assume for the ideal amplifier when we learned about op amp circuits. We will now investigate how to build these amplifiers. The reading in Sections 6.1~2 provides important and necessary background information for differential amplifiers. Then, we will skip to 6.6 which investigates building differential amplifier with MOSFETs. Wei ES154 - Lecture 14 2 MOSFET Internal Capacitances • From our study of the physical operation of MOSFETs, we can see that there are internal capacitances – Gate capacitance • from gate oxide (parallel plate and fringing capacitors) • Cgs, Cgd, Cgb – Junction capacitances • from source-body and drain-body depletion layer capacitances (reverse biased PN junctions) • Csb, Cdb Cgs, Cgd, Cgb Cdb Wei ES154 - Lecture 14 3 MOS Gate Cap • The three gate capacitances (Cgs, Cgd, Cgb) depend on the transistor’s mode (region) of operation – In triode (linear) region (vDS = small), channel has uniform depth 1 C =C = WL C gs gd 2 ox – In saturation region, channel is tapered and pinched off near the drain.