Coupled Belt-Pulley Mechanics in Serpentine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Engine Components and Filters: Damage Profiles, Probable Causes and Prevention
ENGINE COMPONENTS AND FILTERS: DAMAGE PROFILES, PROBABLE CAUSES AND PREVENTION Technical Information AFTERMARKET Contents 1 Introduction 5 2 General topics 6 2.1 Engine wear caused by contamination 6 2.2 Fuel flooding 8 2.3 Hydraulic lock 10 2.4 Increased oil consumption 12 3 Top of the piston and piston ring belt 14 3.1 Hole burned through the top of the piston in gasoline and diesel engines 14 3.2 Melting at the top of the piston and the top land of a gasoline engine 16 3.3 Melting at the top of the piston and the top land of a diesel engine 18 3.4 Broken piston ring lands 20 3.5 Valve impacts at the top of the piston and piston hammering at the cylinder head 22 3.6 Cracks in the top of the piston 24 4 Piston skirt 26 4.1 Piston seizure on the thrust and opposite side (piston skirt area only) 26 4.2 Piston seizure on one side of the piston skirt 27 4.3 Diagonal piston seizure next to the pin bore 28 4.4 Asymmetrical wear pattern on the piston skirt 30 4.5 Piston seizure in the lower piston skirt area only 31 4.6 Heavy wear at the piston skirt with a rough, matte surface 32 4.7 Wear marks on one side of the piston skirt 33 5 Support – piston pin bushing 34 5.1 Seizure in the pin bore 34 5.2 Cratered piston wall in the pin boss area 35 6 Piston rings 36 6.1 Piston rings with burn marks and seizure marks on the 36 piston skirt 6.2 Damage to the ring belt due to fractured piston rings 37 6.3 Heavy wear of the piston ring grooves and piston rings 38 6.4 Heavy radial wear of the piston rings 39 7 Cylinder liners 40 7.1 Pitting on the outer -

Timing Belt Interference Caution Note: Camshaft
Carmax 6067 170 Turnpike Rd Westborough, MA 01581 YMMS: 1991 Chevrolet Lumina Z34 Sep 3, 2020 Engine: 3.4L Eng License: VIN: Odometer: TIMING BELT INTERFERENCE CAUTION NOTE: CAMSHAFT DRIVE BELTS OR TIMING BELTS - The condition of camshaft drive belts should always be checked on vehicles which have more than 50,000 miles. Although some manufacturers do not recommend replacement at a specified mileage, others require it at 60,000-100,000 miles. A camshaft drive belt failure may cause extensive damage to internal engine components on most engines, although some designs do not allow piston-to-valve contact. These designs are often called "Free Wheeling". Many manufacturers changed their maintenance and warranty schedules in the mid-1980's to reflect timing belt inspection and/or replacement at 50,000- 60,000 miles. Most service interval schedules shown in this section reflect these changes. Belts or components should be inspected and replaced if any of the following conditions exist: Crack Or Tears In Belt Surface Missing, Damaged, Cracked Or Rounded Teeth Oil Contamination Damaged Or Faulty Tensioners Incorrect Tension Adjustment REMOVAL & INSTALLATION Tip: Timing belt CAUTION: For 1996-97 models, this application is an interference engine. Do not rotate camshaft or crankshaft when timing belt is removed, or engine damage may occur. NOTE: The camshaft timing procedure has been updated by TSB bulletin No. 47-61-34, dated December, 1994. REMOVAL Tip: timing 3.4 x motor 1. Disconnect negative battery cable. Remove air cleaner and duct assembly. Drain engine coolant. 2. Remove accelerator and cruise control cables from throttle body. -

Belt Drive Systems: Potential for CO2 Reductions and How to Achieve Them
19 Belt drive 19 Belt drive Belt drive 19 Belt drive systems Potenti al for CO2 reducti ons and how to achieve them Hermann Sti ef Rainer Pfl ug Timo Schmidt Christi an Fechler 19 264 Schaeffl er SYMPOSIUM 2010 Schaeffl er SYMPOSIUM 2010 265 19 Belt drive Belt drive 19 If required, double-row Introducti on Tension pulleys and angular contact ball Single and double eccentric tensioners bearings (Figure 3) are Schaeffl er has volume produced components for idler pulleys used that also have an belt drive systems since 1977. For the past 15 years, opti mized grease sup- Schaeffl er has worked on the development of com- One use of INA idler pulleys is to reduce noise in ply volume. These plete belt drive systems in ti ming drives (Figure 1) criti cal belt spans, to prevent collision problems bearings are equipped as well as in accessory drives (Figure 2). with the surrounding structure, to guide the belt with high-temperature or to increase the angle of belt wrap on neighbor- rolling bearing greases ing pulleys. These pulleys have the same rati ng and appropriate seals. life and noise development requirements as belt Standard catalog bear- tensioning systems. For this applicati on, high-pre- ings are not as suitable Pulleys Variable camsha ming cision single-row ball bearings with an enlarged for this applicati on. grease supply volume have proven suffi cient. The tension pulleys in- stalled consist of single or double-row ball bearings specially de- veloped, opti mized and manufactured by INA for use in belt drive ap- Idler pulleys plicati ons. -
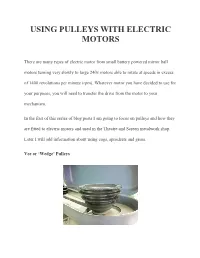
Using Pulleys with Electric Motors
USING PULLEYS WITH ELECTRIC MOTORS There are many types of electric motor from small battery powered mirror ball motors turning very slowly to large 240v motors able to rotate at speeds in excess of 1400 revolutions per minute (rpm). Whatever motor you have decided to use for your purposes, you will need to transfer the drive from the motor to your mechanism. In the first of this series of blog posts I am going to focus on pulleys and how they are fitted to electric motors and used in the Theatre and Screen metalwork shop. Later I will add information about using cogs, sprockets and gears. Vee or ‘Wedge’ Pulleys Pulleys are commonly used if the motor is going to rotate at high speed, but not always as I have seen them used in heavy duty mirror ball motors. The drive is transferred to another pulley using a vee belt (both pulley and vee belt are shown in the image above). This type of pulley (with multiple grooves) is called a ‘step pulley’. Step pulleys are used to adjust the speed of rotation of the final drive without having to take the pulley off and replace it with another. The vee belt is ‘jumped’ across the different diameter 'vee groove’ to change the final drive rpm. A large diameter, driving a small diameter will increase the speed of the final drive rpm. Inversely, a small diameter driving a large diameter will reduce the final drive rpm. These are basic gearing principles that are explained. If you are using step pulleys to adjust the drive speed, you will need to ensure that they are both identical in size (matched) or the belt will either; not grip, or be too tight, as you change the belt from groove to groove. -

Engineering Info
Engineering Info To Find Given Formula 1. Basic Geometry Circumference of a circle Diameter Circumference = 3.1416 x diameter Diameter of a circle Circumference Diameter = Circumference / 3.1416 2. Motion Ratio High Speed & Low Speed Ratio = RPM High RPM Low RPM Feet per Minute of Belt RPM = FPM and Pulley Diameter .262 x diameter in inches Belt Speed Feet per Minute RPM & Pulley Diameter FPM = .262 x RPM x diameter in inches Ratio Teeth of Pinion & Teeth of Gear Ratio = Teeth of Gear Teeth of Pinion Ratio Two Sprockets or Pulley Diameters Ratio = Diameter Driven Diameter Driver 3. Force - Work - Torque Force (F) Torque & Diameter F = Torque x 2 Diameter Torque (T) Force & Diameter T = ( F x Diameter) / 2 Diameter (Dia.) Torque & Force Diameter = (2 x T) / F Work Force & Distance Work = Force x Distance Chain Pull Torque & Diameter Pull = (T x 2) / Diameter 4. Power Chain Pull Horsepower & Speed (FPM) Pull = (33,000 x HP)/ Speed Horsepower Force & Speed (FPM) HP = (Force x Speed) / 33,000 Horsepower RPM & Torque (#in.) HP = (Torque x RPM) / 63025 Horsepower RPM & Torque (#ft.) HP = (Torque x RPM) / 5250 Torque HP & RPM T #in. = (63025 x HP) / RPM Torque HP & RPM T #ft. = (5250 x HP) / RPM 5. Inertia Accelerating Torque (#ft.) WK2, RMP, Time T = WK2 x RPM 308 x Time Accelerating Time (Sec.) Torque, WK2, RPM t = WK2 x RPM 308 x Torque WK2 at motor WK2 at Load, Ratio WK2 Motor = WK2 Ratio2 6. Gearing Gearset Centers Pd Gear & Pd Pinion Centers = ( PdG + PdP ) / 2 Pitch Diameter No. of Teeth & Diametral Pitch Pd = Teeth / DP Pitch Diameter No. -
Decoupled Pulley Fax +49 6201 25964-11 Fax +39 0121 369299
The typical crankshaft vibrations are compensated by employing high quality decoupled belt pulleys. This minimizes the transmission of vibrations to other vehicle components and the associated effects on the entire vehicle. So you can enjoy undisturbed ride comfort. CORTECO GmbH CORTECO S.r.l.u. SEALING VIBRATION CONTROL CABIN AIR FILTER Badener Straße 4 Corso Torino 420/D 69493 Hirschberg 10064 Pinerolo (TO) Germanny Italy Corteco original quality Tel. +49 6201 25964-0 Tel. +39 0121 369269 Decoupled PULLEY Fax +49 6201 25964-11 Fax +39 0121 369299 CORTECO S.A.S. CORTECO Ltd. Z.A. La Couture Unit 6, Wycliffe Industrial 87140 Nantiat Park Complex inner workings: France Lutterworth The decoupled belt pulley Tel. +33 5 55536800 Leicestershire is joined to the torsional Fax +33 5 55536888 LE17 4HG vibration damper by a United Kingdom highly elastic elastomer Tel. +44 1455 550000 part, thereby offering opti- www.corteco.com Fax +44 1455 550066 mum damping properties. 19036674 SIG-08/2012 THE belt DRIVE MOVES A EXPENSIVE economic Satisfied customers NUMBER OF THINGS MEASURES ARE GOOD customers No matter whether a drive belt is too loud or ancillary units are damaged by vibration – belt drive decoupling deficiencies are always associated with dissatisfaction. Anyone not using original parts for a decoupled belt pul- ley is making a false saving. Cheap counterfeit products generally lead to complaints after a short running time and loss of customer confidence. On the other hand, ori- ginal parts from CORTECO still work reliably, often after 100,000 kilometers. Transmission of crankshaft vibrations to ancillary units can produce an increased noise level, severe wear of adjoi- Original: after 100,000 km in the vehicle The decoupled belt pulley should be checked after about ning components and undesirable vehicle vibration. -

Engine Crankshaft Pulley Clutch
Europaisches Patentamt European Patent Office 0 Publ ication number: 0 136 384 Office europeen des brevets A1 © EUROPEAN PATENT APPLICATION © Application number: 83401933.3 © lnt.CI.«: F 02 N 17/08 F 02 B 67/06 © Date of filing: 03.10.83 © Date of publication of application: ©Applicant: Canadian Fram Limited 10.04.85 Bulletin 85/15 540 Park Avenue East P.O. Box 2014 Chatham Ontario N7M 5M7(CA) @ Designated Contracting States: DE FR GB IT © Inventor: Dejong, Allen W. 34 English Sideroad Chatham Ontario N7M 4417(CA) © Representative: Brulle, Jean et al. Service Brevets Bendix 44, rue Francois 1er F-75008Paris(FR) © Engine crankshaft pulley clutch. © A vehicle engine (10) carries a number of belt-driven accessories which are driven through a belt (16) and a clutch and pulley assembly (14) carried on the engine crankshaft (12). The assembly (14) includes an electromagnetic coil (56) which responds to an electrical signal to couple the pulley (36) for rotation with the crankshaft (12) when a signal is transmitted to the coil (56) and to otherwise permit the crankshaft (12) to turn relative to the pulley (36). A throttle position switch (82) intercepts the signal to the coil (56) when the throttle mechanism of the vehicle is moved to a predetermined position when the vehicle is accelerated to thereby disconnect the pulley (36) from the crankshaft (12) during vehicle accelerations. The coil (56) is also wired through the vehicle ignition switch (86) so that the pulley (36) is also disconnected from the crankshaft (12) when the vehicle is started. 00 M CD M LU Croydon Printing Company Ltd. -

Subaru Crank Pulley Tool Manual
503.2 - Subaru Crank Pulley Tool 1 V2 Instructions SPECIAL NOTES: • The use of a factory service manual is highly recommended. These can be purchased at the dealer, or downloaded online at http://techinfo.subaru.com • Company23 is not responsible for damage done to your vehicle as a result of misuse of this product. • Company23 does its best to ensure the accuracy of this manual but is not responsible for errors. LOOSENING INSTRUCTIONS: Step 1) Gain Access to accessory belts by removing the air duct and belt covers. Step 2) Remove the accessory belts by relieving the tension from the alternator and the A/C idler. On 08+ models utilizing the A/C stretch belt it is necessary to rotate the engine 1-3 times using the 22mm crank bolt while a helper pulls on the belt from the A/C pulley to feed the belt off the pulley. Step 3) You must identify which crank pulley you have. The Company23 crank tool works with 2 types of OEM crank pulleys. If you have the pulley on top, thread in the 4 larger bolts into the Company23 crank pulley tool. If you have the pulley on the bottom, thread in the 4 smaller bolts into the reinforcement ring with the Company23 crank pulley tool in between. 1 Step 4) After the 4 pins have been installed into the tool, insert the tool into the crank pulley. Step 5) Using a 1/2" drive breaker bar and a 22mm socket, loosen the crank pulley bolt while firmly holding the Company23 Crank Pulley Tool. -

From Ancient Greece to Byzantium
Proceedings of the European Control Conference 2007 TuA07.4 Kos, Greece, July 2-5, 2007 Technology and Autonomous Mechanisms in the Mediterranean: From Ancient Greece to Byzantium K. P. Valavanis, G. J. Vachtsevanos, P. J. Antsaklis Abstract – The paper aims at presenting each period are then provided followed by technology and automation advances in the accomplishments in automatic control and the ancient Greek World, offering evidence that transition from the ancient Greek world to the Greco- feedback control as a discipline dates back more Roman era and the Byzantium. than twenty five centuries. II. CHRONOLOGICAL MAP OF SCIENCE & TECHNOLOGY I. INTRODUCTION It is worth noting that there was an initial phase of The paper objective is to present historical evidence imported influences in the development of ancient of achievements in science, technology and the Greek technology that reached the Greek states from making of automation in the ancient Greek world until the East (Persia, Babylon and Mesopotamia) and th the era of Byzantium and that the main driving force practiced by the Greeks up until the 6 century B.C. It behind Greek science [16] - [18] has been curiosity and was at the time of Thales of Miletus (circa 585 B.C.), desire for knowledge followed by the study of nature. when a very significant change occurred. A new and When focusing on the discipline of feedback control, exclusively Greek activity began to dominate any James Watt’s Flyball Governor (1769) may be inherited technology, called science. In subsequent considered as one of the earliest feedback control centuries, technology itself became more productive, devices of the modern era. -
C6 Corvette Supercharger Kit Instructions ECS SC 600 Instructions (C6)
C6 Corvette Supercharger Kit Instructions ECS SC 600 Instructions (C6) These instructions are meant to serve as a guide to the installation of the ECS SC600 Supercharging kit. Please be sure to use all safety equipment including gloves, and eye protection. Please use proper techniques to capture and dispose of, or reuse factory fluids. Utilization of the proper tools will make the install smoother and faster. If you are having ECS provide you with a start up tune, your first step should be to remove your PCM, and ship immediately so that you can have it back ready for start up. Our shipping address is 562 Rt. 539, Cream Ridge, NJ, 08514. Installation should take between 1012 andto 15 20 hours hours for a qualified mechanic. Do not rush the install. If need technical support please call the shop at 609-752-0321. ECS SC600 Kit Installation: • Remove fuel Rail covers, and disconnect battery terminals with 10 MM wrench. • Remove cap from coolant reservoir and proceed to drain coolant by turning radiator drain cock one ¼ turn to the left. • Remove stock serpentine beltbet by placing 15mm wrench on tensioner bolt and press towards intake and pulling bet forward off tensioner • Remove stock tensioner by removing the 2 15mm bolts with socket. Save bolts for later use. • Remove hard plastic vacuum line from passenger side valve cover (Fig.1) 1 • Remove 15 mm bolt and bracket holding Evap solenoid to passenger side head and discard. Evap solenoid stays in place. (Fig.2) • DisconnectOn the drivers MAF side and of thenthe car, remove remove stock alternator air bridge wiring and filterharness assembly from top from of alternator car by loosening and positive clamps alternator and pulling wire forwardby removing and up 13mm off throttle retaining body. -

Chapter 8 Glossary
Technology: Engineering Our World © 2012 Chapter 8: Machines—Glossary friction. A force that acts like a brake on moving objects. gear. A rotating wheel-like object with teeth around its rim used to transmit force to other gears with matching teeth. hydraulics. The study and technology of the characteristics of liquids at rest and in motion. inclined plane. A simple machine in the form of a sloping surface or ramp, used to move a load from one level to another. lever. A simple machine that consists of a bar and fulcrum (pivot point). Levers are used to increase force or decrease the effort needed to move a load. linkage. A system of levers used to transmit motion. lubrication. The application of a smooth or slippery substance between two objects to reduce friction. machine. A device that does some kind of work by changing or transmitting energy. mechanical advantage. In a simple machine, the ability to move a large resistance by applying a small effort. mechanism. A way of changing one kind of effort into another kind of effort. moment. The turning force acting on a lever; effort times the distance of the effort from the fulcrum. pneumatics. The study and technology of the characteristics of gases. power. The rate at which work is done or the rate at which energy is converted from one form to another or transferred from one place to another. pressure. The effort applied to a given area; effort divided by area. pulley. A simple machine in the form of a wheel with a groove around its rim to accept a rope, chain, or belt; it is used to lift heavy objects. -
Pulley Dimensional Reference Identification Instructions
PULLEY DIMENSIONAL REFERENCE IDENTIFICATION INSTRUCTIONS DAYCO IDLER/TENSIONER PULLEYS The advanced technologies employed in the materials research, engineering and manufacture of DAYCO idler/ tensioner pulleys has earned them a reputation for quality long lasting performance. Maximum structural integrity and optimal design are guaranteed through “modeling” using state-of-the-art 3D Computer Aided Design software and Finite Element Analysis. The manufacture of either our specially formulated glass filled polymer (plastic) pulleys or metal pulleys with smoother surfaces and tighter dimensional tolerances reduces vibration which translates into a cooler running belt and ultimately longer belt life. Lifetime lubricated ball bearing and high temperature grease and seals assure peak bearing performance. These elements working together all provide the smooth, quiet drive service that both the Automotive OE and Aftermarket demand. Determine if pulley is: 3Flat with Flange ................................ 3Flat without flange ............................ (count grooves) Example of 4 groove 3Grooved with flange .......................... (count grooves) Example of 6 groove 3Grooved without flange ..................... Competitive pulleys may vary slightly 2 IDENTIFICATION INSTRUCTIONS DAYCO IDLER/TENSIONER PULLEY DIMENSIONS EXPLANATION B C “A” Overall Diameter “B” Overall Width “C” Bearing ID1 D A “D” Bearing ID2 A B C D Overall Overall Bearing Bearing Description Part# Diameter Width ID1 ID2 64mm 33.5mm 14.5mm 8.4mm GLASS FILLED POLYMER (PLASTIC)