Technical Introduction to IEEE 1394
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Getting Started with Your VXI-1394 Interface for Windows NT/98 And
VXI Getting Started with Your VXI-1394 Interface for Windows NT/98 VXI-1394 Interface for Windows NT/98 November 1999 Edition Part Number 322109D-01 Worldwide Technical Support and Product Information www.ni.com National Instruments Corporate Headquarters 11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 794 0100 Worldwide Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 284 5011, Canada (Calgary) 403 274 9391, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, China 0755 3904939, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Greece 30 1 42 96 427, Hong Kong 2645 3186, India 91805275406, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico (D.F.) 5 280 7625, Mexico (Monterrey) 8 357 7695, Netherlands 0348 433466, Norway 32 27 73 00, Poland 48 22 528 94 06, Portugal 351 1 726 9011, Singapore 2265886, Spain 91 640 0085, Sweden 08 587 895 00, Switzerland 056 200 51 51, Taiwan 02 2377 1200, United Kingdom 01635 523545 For further support information, see the Technical Support Resources appendix. To comment on the documentation, send e-mail to [email protected] © Copyright 1998, 1999 National Instruments Corporation. All rights reserved. Important Information Warranty The National Instruments VXI-1394 board is warranted against defects in materials and workmanship for a period of one year from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period. -

A Technology Comparison Adopting Ultra-Wideband for Memsen’S File Sharing and Wireless Marketing Platform
A Technology Comparison Adopting Ultra-Wideband for Memsen’s file sharing and wireless marketing platform What is Ultra-Wideband Technology? Memsen Corporation 1 of 8 • Ultra-Wideband is a proposed standard for short-range wireless communications that aims to replace Bluetooth technology in near future. • It is an ideal solution for wireless connectivity in the range of 10 to 20 meters between consumer electronics (CE), mobile devices, and PC peripheral devices which provides very high data-rate while consuming very little battery power. It offers the best solution for bandwidth, cost, power consumption, and physical size requirements for next generation consumer electronic devices. • UWB radios can use frequencies from 3.1 GHz to 10.6 GHz, a band more than 7 GHz wide. Each radio channel can have a bandwidth of more than 500 MHz depending upon its center frequency. Due to such a large signal bandwidth, FCC has put severe broadcast power restrictions. By doing so UWB devices can make use of extremely wide frequency band while emitting very less amount of energy to get detected by other narrower band devices. Hence, a UWB device signal can not interfere with other narrower band device signals and because of this reason a UWB device can co-exist with other wireless devices. • UWB is considered as Wireless USB – replacement of standard USB and fire wire (IEEE 1394) solutions due to its higher data-rate compared to USB and fire wire. • UWB signals can co-exists with other short/large range wireless communications signals due to its own nature of being detected as noise to other signals. -

ECESATUSB1 This Expresscard Power Esata Port Controller Card
1 Port ExpressCard Power eSATA Controller Adapter Card StarTech ID: ECESATUSB1 This ExpressCard Power eSATA port controller card can be installed in an available ExpressCard 34/54 mm slot to provide a powered eSATA connection, and also alternatively provide either external SATA (data only) or USB 2.0 connectivity from one uniquely designed port if using with standard eSATA or USB devices. An ideal solution for using an eSATA SSD Flash drive on your laptop, the power eSATA card delivers both a high speed eSATA connection and power from the combined USB port. A versatile connectivity solution, the card features built-in port multiplier support, allowing multi-drive eSATA storage enclosures to be connected to the host computer using a single eSATA cable. Taking advantage of the transfer speed of eSATA connection and the 5V power output of the USB 2.0 port, the ExpressCard Power eSATA adapter is the perfect answer for connecting compatible mobile drive enclosures, similar to the built-in power eSATA port provided by the following laptop computers: Toshiba: Satellite E105, A350, Satellite Pro P300; Qosmio G50, X305, Portege A600, M750, R500, R600; and Tecra M10, R10, A10. Dell: Studio 15, 17; Latitude E6400, E6500; Precision M2400, M4400, M6400, M6400 Covet. Applications Connects to eSATA SSD Flash drives, such as OCZ Throttle, Kangaru e-Flash drives and Ridata Racer series flash drives Provides connectivity between Notebooks and PCs with ExpressCard slots to external drive enclosures with Power eSATA (eSATA+USB) port, or with regular eSATA -

Computer Bus Characteristics
Upendra Sharma (upsharma.in) Computer Bus A bus, in computing, is a set of physical connections (cables, printed circuits, etc.) which can be shared by multiple hardware components in order to communicate with one another. The purpose of buses is to reduce the number of "pathways" needed for communication between the components, by carrying out all communications over a single data channel. This is why the metaphor of a "data highway" is sometimes used. If only two hardware components communicate over the line, it is called a hardware port (such as a serial port or parallel port). Characteristics A bus is characterised by the amount of information that can be transmitted at once. This amount, expressed in bits, corresponds to the number of physical lines over which data is sent simultaneously. A 32-wire ribbon cable can transmit 32 bits in parallel. The term "width" is used to refer to the number of bits that a bus can transmit at once. Additionally, the bus speed is also defined by its frequency (expressed in Hertz), the number of data packets sent or received per second. Each time that data is sent or received is called a cycle. This way, it is possible to find the maximum transfer speed of the bus, the amount of data which it can transport per unit of time, by multiplying its width by its frequency. A bus with a width of 16 bits and a frequency of 133 MHz, therefore, has a transfer speed equal to: Upendra Sharma (upsharma.in) Types of Buses In reality, each bus is generally constituted of 50 to 100 distinct physical lines, divided into three subassemblies: The address bus (sometimes called the memory bus) transports memory addresses which the processor wants to access in order to read or write data. -

2 Port Flush Mount Expresscard 54Mm Superspeed USB 3.0 Card Adapter Startech ID: ECUSB3S254F
2 Port Flush Mount ExpressCard 54mm SuperSpeed USB 3.0 Card Adapter StarTech ID: ECUSB3S254F The ECUSB3S254F 2-Port Flush Mount USB 3.0 ExpressCard Adapter uses a unique form factor design that allows it to sit fully in a standard 54mm laptop ExpressCard slot without sticking out. When inserted, the USB 3.0 ports provided by the ExpressCard adapter sit flush with the sides of the laptop, creating a seamless add-on that can be left installed even while on the move, without having to worry about impact damage to either the card or the ExpressCard slot. The SuperSpeed USB 3.0 Card supports data transfer rates of up to 5Gbps, and is backward compatible with USB 2.0 (at up to 480Mbps), or USB 1.1/1.0 at up to 12/1.5 Mbps respectively - the perfect laptop accessory for users to connect USB devices, both new and old. Applications Users who need USB connectivity, but do not need to swap between other ExpressCard adapters, so will leave the card installed in the card slot Mobile users who want to leave ExpressCard adapters installed, without worry about damaging the card or slot while on the move Connect high performance USB 3.0 external storage devices to a laptop Upgrade an older laptop with USB 3.0 connectivity Expand on your laptop expansion capabilities with additional USB ports Features Unique flush-mount form factor design Two SuperSpeed USB 3.0 compliant ports with support for transfer rates up to 5 Gbps Backward compatible with USB 2.0/1.x devices Compliant with USB 3.0 base specification 1.0 and xHCI specification 0.95 Compliant with -

LPT, COM, 1394, USB, USB-C LPT IEEE 1284, LPT (Англ. Line Print Terminal; Также Параллельный Порт, По
LPT, COM, 1394, USB, USB-C LPT IEEE 1284, LPT (англ. Line Print Terminal; также параллельный порт, порт принтера) — международный стандарт параллельного интерфейса для подключения периферийных устройств персонального компьютера. В основном используется для подключения к компьютеру принтера, сканера и других внешних устройств (часто использовался для подключения внешних устройств хранения данных), однако может применяться и для других целей (организация связи между двумя компьютерами, подключение каких-либо механизмов телесигнализации и телеуправления). В основе данного стандарта лежит интерфейс Centronics и его расширенные версии (ECP, EPP). Название LPT образовано от наименования стандартного устройства принтера LPT1 (Line Printer Terminal или Line PrinTer) в операционных системах семейства MS-DOS. Параллельный порт Centronics — порт, используемый с 1981 года в персональных компьютерах фирмы IBM для подключения печатающих устройств, разработан фирмой Centronics Data Computer Corporation; уже давно стал стандартом де-факто, хотя в действительности официально на данный момент он не стандартизирован. Изначально этот порт был разработан только для симплексной (однонаправленной) передачи данных, так как предполагалось, что порт Centronics должен использоваться только для работы с принтером. Впоследствии разными фирмами были разработаны дуплексные расширения интерфейса (byte mode, EPP, ECP). Затем был принят международный стандарт IEEE 1284, описывающий как базовый интерфейс Centronics, так и все его расширения. Разъемы. Порт на стороне управляющего -

PC 97 Hardware Design Guide
Part 4 — Device Design Guidelines CHAPTER 21 Printers This chapter presents the requirements and recommendations for printers under the Microsoft Windows family of operating systems. Version 1.1 Includes changes to References for Printers Contents Overview for Printers.............................. ............... 312 Basic Printer Features............................. ................ 312 Basic Features for IEEE 1394 Printers. ................. 312 Basic Features for USB Printers . ............... 312 Basic Features for IEEE 1284 Printers. ................. 313 PC 97 Design for Printers .......................... ................ 314 Plug and Play for Printers. ............... 314 Power Management for Print Components . .............. 315 Device Drivers and Installation for Printers . .................... 315 References for Printers ............................ ................ 318 Checklist for Printers ............................. ................ 320 312 PC 97 Design — Part 4 Device Design Guidelines Overview for Printers This section presents the key design issues for printers under Microsoft Windows. Printers and other devices attached to parallel ports should be capable of high- speed, bidirectional data transfers. The design criteria for parallel devices follow those for parallel ports described in the “Serial, Parallel, and Wireless Support” chapter. The PC 97 requirements for printers and parallel ports seek to ensure the following: • Ensure maximum speed for transfer of parallel data between the system and the peripheral. • Ensure a true Plug and Play experience for users. Basic Printer Features This section summarizes the basic hardware requirements for printers for PC 97. Basic Features for IEEE 1394 Printers This section defines requirements for printers that use IEEE 1394. 1. Compliance with PC 97 requirements for IEEE 1394 Required This bus is recommended in PC 97 for support of fast, high-density data transfer. For information about implementing IEEE 1394 for PC 97, see the “IEEE 1394” chapter in Part 3 of this guide. -

PDP-11 Bus Handbook (1979)
The material in this document is for informational purposes only and is subject to change without notice. Digital Equipment Corpo ration assumes no liability or responsibility for any errors which appear in, this document or for any use made as a result thereof. By publication of this document, no licenses or other rights are granted by Digital Equipment Corporation by implication, estoppel or otherwise, under any patent, trademark or copyright. Copyright © 1979, Digital Equipment Corporation The following are trademarks of Digital Equipment Corporation: DIGITAL PDP UNIBUS DEC DECUS MASSBUS DECtape DDT FLIP CHIP DECdataway ii CONTENTS PART 1, UNIBUS SPECIFICATION INTRODUCTION ...................................... 1 Scope ............................................. 1 Content ............................................ 1 UNIBUS DESCRIPTION ................................................................ 1 Architecture ........................................ 2 Unibus Transmission Medium ........................ 2 Bus Terminator ..................................... 2 Bus Segment ....................................... 3 Bus Repeater ....................................... 3 Bus Master ........................................ 3 Bus Slave .......................................... 3 Bus Arbitrator ...................................... 3 Bus Request ....................................... 3 Bus Grant ......................................... 3 Processor .......................................... 4 Interrupt Fielding Processor ......................... -

From Camac to Wireless Sensor Networks and Time- Triggered Systems and Beyond: Evolution of Computer Interfaces for Data Acquisition and Control
Janusz Zalewski / International Journal of Computing, 15(2) 2016, 92-106 Print ISSN 1727-6209 [email protected] On-line ISSN 2312-5381 www.computingonline.net International Journal of Computing FROM CAMAC TO WIRELESS SENSOR NETWORKS AND TIME- TRIGGERED SYSTEMS AND BEYOND: EVOLUTION OF COMPUTER INTERFACES FOR DATA ACQUISITION AND CONTROL. PART I Janusz Zalewski Dept. of Software Engineering, Florida Gulf Coast University Fort Myers, FL 33965, USA [email protected], http://www.fgcu.edu/zalewski/ Abstract: The objective of this paper is to present a historical overview of design choices for data acquisition and control systems, from the first developments in CAMAC, through the evolution of their designs operating in VMEbus, Firewire and USB, to the latest developments concerning distributed systems using, in particular, wireless protocols and time-triggered architecture. First part of the overview is focused on connectivity aspects, including buses and interconnects, as well as their standardization. More sophisticated designs and a number of challenges are addressed in the second part, among them: bus performance, bus safety and security, and others. Copyright © Research Institute for Intelligent Computer Systems, 2016. All rights reserved. Keywords: Data Acquisition, Computer Control, CAMAC, Computer Buses, VMEbus, Firewire, USB. 1. INTRODUCTION which later became international standards adopted by IEC and IEEE [4]-[7]. The design and development of data acquisition The CAMAC standards played a significant role and control systems has been driven by applications. in developing data acquisition and control The earliest and most prominent of those were instrumentation not only for nuclear research, but applications in scientific experimentation, which also for research in general and for industry as well arose in the early sixties of the previous century, [8]. -
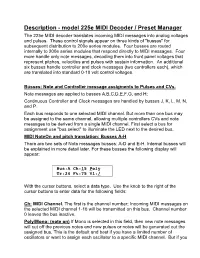
Model 225E MIDI Decoder / Preset Manager the 225E MIDI Decoder Translates Incoming MIDI Messages Into Analog Voltages and Pulses
Description - model 225e MIDI Decoder / Preset Manager The 225e MIDI decoder translates incoming MIDI messages into analog voltages and pulses. These control signals appear on three kinds of "busses" for subsequent distribution to 200e series modules. Four busses are routed internally to 200e series modules that respond directly to MIDI messages. Four more handle only note messages, decoding them into front panel voltages that represent pitches, velocities and pulses with sustain information. An additional six busses handle controller and clock messages (two controllers each), which are translated into standard 0-10 volt control voltages. Busses: Note and Controller message assigments to Pulses and CVs. Note messages are applied to busses A,B,C,D,E,F,G, and H; Continuous Controller and Clock messages are handled by busses J, K, L, M, N, and P. Each bus responds to one selected MIDI channel. But more than one bus may be assigned to the same channel, allowing multiple controllers CVs and note messages to be derived from a single MIDI channel. First select a bus for assignment use "bus select" to illuminate the LED next to the desired bus. MIDI NoteOn and pitch translation: Busses A-H There are two sets of Note messages busses: A-D and E-H. Internal busses will be explained in more detail later. For these busses the following display will appear: Bus:A Ch:15 Poly Tr:24 Ft:75 Vl:/ With the cursor buttons, select a data type. Use the knob to the right of the cursor buttons to enter data for the following fields: Ch: MIDI Channel. -
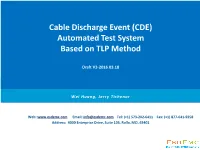
Cable Discharge Event (CDE) Automated Test System Based on TLP Method
Cable Discharge Event (CDE) Automated Test System Based on TLP Method Draft V3-2016.03.18 Wei Huang, Jerry Tichenor Web: www.esdemc.com Email: [email protected] Tel: (+1) 573-202-6411 Fax: (+1) 877-641-9358 Address: 4000 Enterprise Drive, Suite 103, Rolla, MO, 65401 Cable Discharge Event (CDE) Background What is CDE Event ? A Cable Discharge Event (CDE) is electrostatic discharge(s) between metal of a cable connector and the mating cable connector or plug. It is very common in daily life. When CDE happens, transient high current and high voltage pulses are generated into the connector pins and cause potential damage to the system with connector. The pulse characteristic is determined by the cable type, cable length, physical arrangement of the cable and system with connector, and system with connector side circuitry. A Generic CDE System Concept Why understanding CDE robustness is important ? The discharge processes are complicated due to the number of pins involved and their connections to a system. In addition, the occurrence rate and severity of the static discharge is important to design a robust system. Basic System Features: A well repeatable test setup to reproduce cable discharge events Pulse injection level covers different types of cable connections Additional System Features: Automatic computer controlled test for all available connector pins Automatic remove DUT residue charge safely after each pulse safely Integrate current and voltage probes to monitor CDE events on each pin ESDEMC Collected Cable Pins and Practical Passive -
Computing Platforms Chapter 4
Computing Platforms Chapter 4 COE 306: Introduction to Embedded Systems Dr. Abdulaziz Tabbakh Computer Engineering Department College of Computer Sciences and Engineering King Fahd University of Petroleum and Minerals [Adapted from slides of Dr. A. El-Maleh, COE 306, KFUPM] Next . Basic Computing Platforms The CPU bus Direct Memory Access (DMA) System Bus Configurations ARM Bus: AMBA 2.0 Memory Components Embedded Platforms Platform-Level Performance Computing Platforms COE 306– Introduction to Embedded System– KFUPM slide 2 Embedded Systems Overview Actuator Output Analog/Digital Sensor Input Analog/Digital CPU Memory Embedded Computer Computing Platforms COE 306– Introduction to Embedded System– KFUPM slide 3 Computing Platforms Computing platforms are created using microprocessors, I/O devices, and memory components A CPU bus is required to connect the CPU to other devices Software is required to implement an application Embedded system software is closely tied to the hardware Computing Platform: hardware and software Computing Platforms COE 306– Introduction to Embedded System– KFUPM slide 4 Computing Platform A typical computing platform includes several major hardware components: The CPU provides basic computational facilities. RAM is used for program and data storage. ROM holds the boot program and some permanent data. A DMA controller provides direct memory access capabilities. Timers are used by the operating system A high-speed bus, connected to the CPU bus through a bridge, allows fast devices to communicate efficiently with the rest of the system. A low-speed bus provides an inexpensive way to connect simpler devices and may be necessary for backward compatibility as well. Computing Platforms COE 306– Introduction to Embedded System– KFUPM slide 5 Platform Hardware Components Computer systems may have one or more bus Buses are classified by their overall performance: lows peed, high- speed.