Finding Largest Small Polygons with Gloptipoly Didier Henrion, Frédéric Messine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Islamic Geometric Ornaments in Istanbul
►SKETCH 2 CONSTRUCTIONS OF REGULAR POLYGONS Regular polygons are the base elements for constructing the majority of Islamic geometric ornaments. Of course, in Islamic art there are geometric ornaments that may have different genesis, but those that can be created from regular polygons are the most frequently seen in Istanbul. We can also notice that many of the Islamic geometric ornaments can be recreated using rectangular grids like the ornament in our first example. Sometimes methods using rectangular grids are much simpler than those based or regular polygons. Therefore, we should not omit these methods. However, because methods for constructing geometric ornaments based on regular polygons are the most popular, we will spend relatively more time explor- ing them. Before, we start developing some concrete constructions it would be worthwhile to look into a few issues of a general nature. As we have no- ticed while developing construction of the ornament from the floor in the Sultan Ahmed Mosque, these constructions are not always simple, and in order to create them we need some knowledge of elementary geometry. On the other hand, computer programs for geometry or for computer graphics can give us a number of simpler ways to develop geometric fig- ures. Some of them may not require any knowledge of geometry. For ex- ample, we can create a regular polygon with any number of sides by rotat- ing a point around another point by using rotations 360/n degrees. This is a very simple task if we use a computer program and the only knowledge of geometry we need here is that the full angle is 360 degrees. -

Applying the Polygon Angle
POLYGONS 8.1.1 – 8.1.5 After studying triangles and quadrilaterals, students now extend their study to all polygons. A polygon is a closed, two-dimensional figure made of three or more non- intersecting straight line segments connected end-to-end. Using the fact that the sum of the measures of the angles in a triangle is 180°, students learn a method to determine the sum of the measures of the interior angles of any polygon. Next they explore the sum of the measures of the exterior angles of a polygon. Finally they use the information about the angles of polygons along with their Triangle Toolkits to find the areas of regular polygons. See the Math Notes boxes in Lessons 8.1.1, 8.1.5, and 8.3.1. Example 1 4x + 7 3x + 1 x + 1 The figure at right is a hexagon. What is the sum of the measures of the interior angles of a hexagon? Explain how you know. Then write an equation and solve for x. 2x 3x – 5 5x – 4 One way to find the sum of the interior angles of the 9 hexagon is to divide the figure into triangles. There are 11 several different ways to do this, but keep in mind that we 8 are trying to add the interior angles at the vertices. One 6 12 way to divide the hexagon into triangles is to draw in all of 10 the diagonals from a single vertex, as shown at right. 7 Doing this forms four triangles, each with angle measures 5 4 3 1 summing to 180°. -

Polygon Review and Puzzlers in the Above, Those Are Names to the Polygons: Fill in the Blank Parts. Names: Number of Sides
Polygon review and puzzlers ÆReview to the classification of polygons: Is it a Polygon? Polygons are 2-dimensional shapes. They are made of straight lines, and the shape is "closed" (all the lines connect up). Polygon Not a Polygon Not a Polygon (straight sides) (has a curve) (open, not closed) Regular polygons have equal length sides and equal interior angles. Polygons are named according to their number of sides. Name of Degree of Degree of triangle total angles regular angles Triangle 180 60 In the above, those are names to the polygons: Quadrilateral 360 90 fill in the blank parts. Pentagon Hexagon Heptagon 900 129 Names: number of sides: Octagon Nonagon hendecagon, 11 dodecagon, _____________ Decagon 1440 144 tetradecagon, 13 hexadecagon, 15 Do you see a pattern in the calculation of the heptadecagon, _____________ total degree of angles of the polygon? octadecagon, _____________ --- (n -2) x 180° enneadecagon, _____________ icosagon 20 pentadecagon, _____________ These summation of angles rules, also apply to the irregular polygons, try it out yourself !!! A point where two or more straight lines meet. Corner. Example: a corner of a polygon (2D) or of a polyhedron (3D) as shown. The plural of vertex is "vertices” Test them out yourself, by drawing diagonals on the polygons. Here are some fun polygon riddles; could you come up with the answer? Geometry polygon riddles I: My first is in shape and also in space; My second is in line and also in place; My third is in point and also in line; My fourth in operation but not in sign; My fifth is in angle but not in degree; My sixth is in glide but not symmetry; Geometry polygon riddles II: I am a polygon all my angles have the same measure all my five sides have the same measure, what general shape am I? Geometry polygon riddles III: I am a polygon. -

Properties of N-Sided Regular Polygons
PROPERTIES OF N-SIDED REGULAR POLYGONS When students are first exposed to regular polygons in middle school, they learn their properties by looking at individual examples such as the equilateral triangles(n=3), squares(n=4), and hexagons(n=6). A generalization is usually not given, although it would be straight forward to do so with just a min imum of trigonometry and algebra. It also would help students by showing how one obtains generalization in mathematics. We show here how to carry out such a generalization for regular polynomials of side length s. Our starting point is the following schematic of an n sided polygon- We see from the figure that any regular n sided polygon can be constructed by looking at n isosceles triangles whose base angles are θ=(1-2/n)(π/2) since the vertex angle of the triangle is just ψ=2π/n, when expressed in radians. The area of the grey triangle in the above figure is- 2 2 ATr=sh/2=(s/2) tan(θ)=(s/2) tan[(1-2/n)(π/2)] so that the total area of any n sided regular convex polygon will be nATr, , with s again being the side-length. With this generalized form we can construct the following table for some of the better known regular polygons- Name Number of Base Angle, Non-Dimensional 2 sides, n θ=(π/2)(1-2/n) Area, 4nATr/s =tan(θ) Triangle 3 π/6=30º 1/sqrt(3) Square 4 π/4=45º 1 Pentagon 5 3π/10=54º sqrt(15+20φ) Hexagon 6 π/3=60º sqrt(3) Octagon 8 3π/8=67.5º 1+sqrt(2) Decagon 10 2π/5=72º 10sqrt(3+4φ) Dodecagon 12 5π/12=75º 144[2+sqrt(3)] Icosagon 20 9π/20=81º 20[2φ+sqrt(3+4φ)] Here φ=[1+sqrt(5)]/2=1.618033989… is the well known Golden Ratio. -
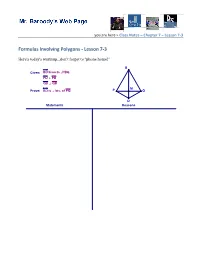
Formulas Involving Polygons - Lesson 7-3
you are here > Class Notes – Chapter 7 – Lesson 7-3 Formulas Involving Polygons - Lesson 7-3 Here’s today’s warmup…don’t forget to “phone home!” B Given: BD bisects ∠PBQ PD ⊥ PB QD ⊥ QB M Prove: BD is ⊥ bis. of PQ P Q D Statements Reasons Honors Geometry Notes Today, we started by learning how polygons are classified by their number of sides...you should already know a lot of these - just make sure to memorize the ones you don't know!! Sides Name 3 Triangle 4 Quadrilateral 5 Pentagon 6 Hexagon 7 Heptagon 8 Octagon 9 Nonagon 10 Decagon 11 Undecagon 12 Dodecagon 13 Tridecagon 14 Tetradecagon 15 Pentadecagon 16 Hexadecagon 17 Heptadecagon 18 Octadecagon 19 Enneadecagon 20 Icosagon n n-gon Baroody Page 2 of 6 Honors Geometry Notes Next, let’s look at the diagonals of polygons with different numbers of sides. By drawing as many diagonals as we could from one diagonal, you should be able to see a pattern...we can make n-2 triangles in a n-sided polygon. Given this information and the fact that the sum of the interior angles of a polygon is 180°, we can come up with a theorem that helps us to figure out the sum of the measures of the interior angles of any n-sided polygon! Baroody Page 3 of 6 Honors Geometry Notes Next, let’s look at exterior angles in a polygon. First, consider the exterior angles of a pentagon as shown below: Note that the sum of the exterior angles is 360°. -
Geometrygeometry
Park Forest Math Team Meet #3 GeometryGeometry Self-study Packet Problem Categories for this Meet: 1. Mystery: Problem solving 2. Geometry: Angle measures in plane figures including supplements and complements 3. Number Theory: Divisibility rules, factors, primes, composites 4. Arithmetic: Order of operations; mean, median, mode; rounding; statistics 5. Algebra: Simplifying and evaluating expressions; solving equations with 1 unknown including identities Important Information you need to know about GEOMETRY… Properties of Polygons, Pythagorean Theorem Formulas for Polygons where n means the number of sides: • Exterior Angle Measurement of a Regular Polygon: 360÷n • Sum of Interior Angles: 180(n – 2) • Interior Angle Measurement of a regular polygon: • An interior angle and an exterior angle of a regular polygon always add up to 180° Interior angle Exterior angle Diagonals of a Polygon where n stands for the number of vertices (which is equal to the number of sides): • • A diagonal is a segment that connects one vertex of a polygon to another vertex that is not directly next to it. The dashed lines represent some of the diagonals of this pentagon. Pythagorean Theorem • a2 + b2 = c2 • a and b are the legs of the triangle and c is the hypotenuse (the side opposite the right angle) c a b • Common Right triangles are ones with sides 3, 4, 5, with sides 5, 12, 13, with sides 7, 24, 25, and multiples thereof—Memorize these! Category 2 50th anniversary edition Geometry 26 Y Meet #3 - January, 2014 W 1) How many cm long is segment 6 XY ? All measurements are in centimeters (cm). -

Self-Dual Configurations and Regular Graphs
SELF-DUAL CONFIGURATIONS AND REGULAR GRAPHS H. S. M. COXETER 1. Introduction. A configuration (mci ni) is a set of m points and n lines in a plane, with d of the points on each line and c of the lines through each point; thus cm = dn. Those permutations which pre serve incidences form a group, "the group of the configuration." If m — n, and consequently c = d, the group may include not only sym metries which permute the points among themselves but also reci procities which interchange points and lines in accordance with the principle of duality. The configuration is then "self-dual," and its symbol («<*, n<j) is conveniently abbreviated to na. We shall use the same symbol for the analogous concept of a configuration in three dimensions, consisting of n points lying by d's in n planes, d through each point. With any configuration we can associate a diagram called the Menger graph [13, p. 28],x in which the points are represented by dots or "nodes," two of which are joined by an arc or "branch" when ever the corresponding two points are on a line of the configuration. Unfortunately, however, it often happens that two different con figurations have the same Menger graph. The present address is concerned with another kind of diagram, which represents the con figuration uniquely. In this Levi graph [32, p. 5], we represent the points and lines (or planes) of the configuration by dots of two colors, say "red nodes" and "blue nodes," with the rule that two nodes differently colored are joined whenever the corresponding elements of the configuration are incident. -

Design of Hexadecagon Circular Patch Antenna with DGS at Ku Band for Satellite Communications
Progress In Electromagnetics Research M, Vol. 63, 163–173, 2018 Design of Hexadecagon Circular Patch Antenna with DGS at Ku Band for Satellite Communications Ketavath Kumar Naik* and Pasumarthi Amala Vijaya Sri Abstract—The design of a hexadecagon circular patch (HDCP) antenna for dual-band operation is presented in this paper. The proposed antenna operates at two resonating frequencies 13.67 GHz, 15.28 GHz with return loss of −42.18 dB, −38.39 dB, and gain 8.01 dBi, 6.01 dBi, respectively. Impedance bandwidths of 854 MHz (13.179–14.033 GHz) and 1140 MHz (14.584–15.724 GHz) are observed for the dual bands, respectively. To produce circular polarization, the HDCP antenna is incorporated with ring and square slots on the radiating patch. The defected ground structure (DGS) is considered for enhancement of gain. Axial ratio of the proposed antenna is less than 3 dB, and VSWR ≤ 2 for dual bands. The measured and simulated (HFSS, CST) results of the HDCP antenna are in agreement. The HDCP antenna can work at Ku band for satellite communications. 1. INTRODUCTION The modern day communication systems require a compact antenna which provides higher gain and larger bandwidth. The conventional microstrip patch antennas have light weight, low cost and compact size which can be easily integrated in other circuit elements [1]. In the literature survey, to enhance the impedance bandwidth and achieve multiple operating frequencies some techniques have been introduced. A novel antenna design with an inverted square- shaped patch antenna [2] with a Y-shaped feeding line for broadband circularly polarized radiation patterns was considered. -

Volume 2 Shape and Space
Volume 2 Shape and Space Colin Foster Introduction Teachers are busy people, so I’ll be brief. Let me tell you what this book isn’t. • It isn’t a book you have to make time to read; it’s a book that will save you time. Take it into the classroom and use ideas from it straight away. Anything requiring preparation or equipment (e.g., photocopies, scissors, an overhead projector, etc.) begins with the word “NEED” in bold followed by the details. • It isn’t a scheme of work, and it isn’t even arranged by age or pupil “level”. Many of the ideas can be used equally well with pupils at different ages and stages. Instead the items are simply arranged by topic. (There is, however, an index at the back linking the “key objectives” from the Key Stage 3 Framework to the sections in these three volumes.) The three volumes cover Number and Algebra (1), Shape and Space (2) and Probability, Statistics, Numeracy and ICT (3). • It isn’t a book of exercises or worksheets. Although you’re welcome to photocopy anything you wish, photocopying is expensive and very little here needs to be photocopied for pupils. Most of the material is intended to be presented by the teacher orally or on the board. Answers and comments are given on the right side of most of the pages or sometimes on separate pages as explained. This is a book to make notes in. Cross out anything you don’t like or would never use. Add in your own ideas or references to other resources. -
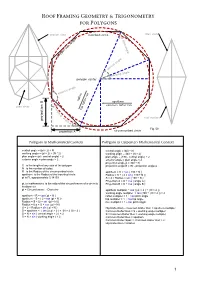
Polygon Rafter Tables Using a Steel Framing Square
Roof Framing Geometry & Trigonometry for Polygons section view inscribed circle plan view plan angle polygon side length central angle working angle polygon center exterior angle radius apothem common rafter run plan view angle B hip rafter run angle A roof surface projection B Fig. 50 projection A circumscribed circle Polygons in Mathematical Context Polygons in Carpenters Mathematical Context central angle = (pi × 2) ÷ N central angle = 360 ÷ N working angle = (pi × 2) ÷ (N * 2) working angle = 360 ÷ (N × 2) plan angle = (pi - central angle) ÷ 2 plan angle = (180 - central angle) ÷ 2 exterior angle = plan angle × 2 exterior angle = plan angle × 2 projection angle A = 360 ÷ N S is the length of any side of the polygon projection angle B = 90 - projection angle a N is the number of sides R is the Radius of the circumscribed circle apothem = R × cos ( 180 ÷ N ) apothem is the Radius of the inscribed circle Radius = S ÷ ( 2 × sin ( 180 ÷ N )) pi is PI, approximately 3.14159 S = 2 × Radius × sin ( 180 ÷ N ) Projection A = S ÷ cos ( angle A ) pi, in mathematics, is the ratio of the circumference of a circle to Projection B = S ÷ cos ( angle B ) its diameter pi = Circumference ÷ Diameter apothem multipler = sec (( pi × 2 ) ÷ ( N × 2 )) working angle multipler = tan (360 ÷ ( N × 2 )) × 2 apothem = R × cos ( pi ÷ N ) rafter multipler = 1 ÷ cos pitch angle apothem = S ÷ ( 2 × tan (pi ÷ N )) hip multipler = 1 ÷ cos hip angle Radius = S ÷ (2 × sin (pi ÷ N )) rise multipler = 1 ÷ tan pitch angle Radius = 0.5 × S × csc ( pi ÷ N ) S = 2 × Radius × sin ( pi ÷ N ) Hip Rafter Run = Common Rafter Run × apothem multipler S = apothem × ( tan ((( pi × 2 ) ÷ (N × 2 ))) × 2 ) Common Rafter Run = S ÷ working angle multipler S = R × sin ( central angle ÷ 2 ) × 2 S = Common Rafter Run × working angle multipler S = R × sin ( working angle ) × 2 Common Rafter Run = apothem Common Rafter Span = Common Rafter Run × 2 Hip Rafter Run = Radius 1 What Is A Polygon Roof What is a Polygon? A closed plane figure made up of several line segments that are joined together. -

Originality Statement
PLEASE TYPE THE UNIVERSITY OF NEW SOUTH WALES Thesis/Dissertation Sheet Surname or Family name: Hosseinabadi First name: Sanaz Other name/s: Abbreviation for degree as given in the University calendar: PhD School: School of Architecture Faculty: Built Environment Title: Residual Meaning in Architectural Geometry: Tracing Spiritual and Religious Origins in Contemporary European Architectural Geometry Abstract 350 words maximum: (PLEASE TYPE) Architects design for more than the instrumental use of a buildings. Geometry is fundamental in architectural design and geometries carry embodied meanings as demonstrated through the long history of discursive uses of geometry in design. The meanings embedded in some geometric shapes are spiritual but this dimension of architectural form is largely neglected in architectural theory. This thesis argues that firstly, these spiritual meanings, although seldom recognised, are important to architectural theory because they add a meaningful dimension to practice and production in the field; they generate inspiration, awareness, and creativity in design. Secondly it will also show that today’s architects subconsciously use inherited geometric patterns without understanding their spiritual origins. The hypothesis was tested in two ways: 1) A scholarly analysis was made of a number of case studies of buildings drawn from different eras and regions. The sampled buildings were selected on the basis of the significance of their geometrical composition, representational symbolism of embedded meaning, and historical importance. The analysis clearly traces the transformation, adaptation or representation of a particular geometrical form, or the meaning attached to it, from its historical precedents to today. 2) A scholarly analysis was also made of a selection of written theoretical works that describe the design process of selected architects. -
Parallelogram Rhombus Nonagon Hexagon Icosagon Tetrakaidecagon Hexakaidecagon Quadrilateral Ellipse Scalene T
Call List parallelogram rhombus nonagon hexagon icosagon tetrakaidecagon hexakaidecagon quadrilateral ellipse scalene triangle square rectangle hendecagon pentagon dodecagon decagon trapezium / trapezoid right triangle equilateral triangle circle octagon heptagon isosceles triangle pentadecagon triskaidecagon Created using www.BingoCardPrinter.com B I N G O parallelogram tetrakaidecagon square dodecagon circle rhombus hexakaidecagon rectangle decagon octagon Free trapezium / nonagon quadrilateral heptagon Space trapezoid right isosceles hexagon hendecagon ellipse triangle triangle scalene equilateral icosagon pentagon pentadecagon triangle triangle Created using www.BingoCardPrinter.com B I N G O pentagon rectangle pentadecagon triskaidecagon hexakaidecagon equilateral scalene nonagon parallelogram circle triangle triangle isosceles Free trapezium / octagon triangle Space square trapezoid ellipse heptagon rhombus tetrakaidecagon icosagon right decagon hendecagon dodecagon hexagon triangle Created using www.BingoCardPrinter.com B I N G O right decagon triskaidecagon hendecagon dodecagon triangle trapezium / scalene pentagon square trapezoid triangle circle Free tetrakaidecagon octagon quadrilateral ellipse Space isosceles parallelogram hexagon hexakaidecagon nonagon triangle equilateral pentadecagon rectangle icosagon heptagon triangle Created using www.BingoCardPrinter.com B I N G O equilateral trapezium / pentagon pentadecagon dodecagon triangle trapezoid rectangle rhombus quadrilateral nonagon octagon isosceles Free scalene hendecagon