Exomars 2016 – Flight Dynamics Operations for the Targeting of the Schiaparelli Module Entry Descent and Landing and the Trace Gas Orbiter Mars Orbit Insertion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Mars Reconnaissance Orbiter Navigation Strategy for the Exomars Schiaparelli EDM Lander Mission
Jet Propulsion Laboratory California Institute of Technology Mars Reconnaissance Orbiter Navigation Strategy for the ExoMars Schiaparelli EDM Lander Mission Premkumar R. Menon Sean V. Wagner, David C. Jefferson, Eric J. Graat, Kyong J. Lee, and William B. Schulze AAS/AIAA Astrodynamics Specialist Conference San Antonio, Texas February 5–9, 2017 AAS Paper 17-337 © 2017 California Institute of Technology. Government Sponsorship Acknowledged. Mars Reconnaissance Orbiter Project Mars Reconnaissance Orbiter (Mission, Spacecraft and PSO) The Mars Reconnaissance Orbiter mission launched in August 2005 from the Cape Canaveral Air Force Station arriving at Mars in March 2006 started science operations in November 2006. MRO has completed 10 years since launch (50,000 orbits by Mar 2017) and to date has returned nearly 300 Terabytes of data. MRO Primary Science Orbit (PSO): • Sun-synchronous orbit ascending node at 3:00 PM ± 15 minutes Local Mean Solar Time (LMST) (daylight equatorial crossing) • Periapsis is frozen about the Mars South Pole • Near-repeat ground track walk (GTW) every 17-day, 211 orbit (short-term repeat) MRO targeting cycle, exact repeat after 4602 orbits. The nominal GTW is 32.45811 km West each 211 orbit cycle (maintained with periodic maneuvers). MRO Spacecraft: • Spacecraft Bus: 3-axis stabilized ACS system; 3-meter diameter High Gain Antenna; hydrazine propulsion system • Instrument Suite: HiRISE Camera, CRISM Imaging spectrometer, Mars Climate Sounder, Mars Color Imager, Context Camera, Shallow Subsurface Radar, Electra engineering payload (among other instrument payloads) 2/07/17 MRO support of ExoMars Schiaparelli Lander Overflight Relay PRM-3 4. MRO shall have good overflight pass geometry within the first 2 Sols after landing. -

Matematikken Viser Vej Til Mars
S •Matematikken The viser vej til Mars Kim Plauborg © The Terma Group 2016 THE BEGINNING Terma has been in Space since man walked on the Moon! © The Terma Group 2016 FROM ESRO TO EXOMARS Terma powered the first comet landing ever! BREAKING NEWS The mission ends today when the Rosetta satellite will set down on the surface In 2014 the Rosetta satellite deployed the small lander Philae, which landed on the cometof 67P morethe than 10 comet years after Rosetta was launched. © The Terma Group 2016 FROM ESRO TO EXOMARS Rosetta Mars Express Technology Venus Express evolution and Galileo enhancement Small GEO BepiColombo ExoMars © The Terma Group 2016 Why go Mars? Getting to and landing on Mars is difficult ! © The Terma Group 2016 THE EXOMARS PROGRAMME Two ESA missions to Mars in cooperation with Roscosmos with the main objective to search for evidence of life 2016 Mission Trace Gas Orbiter Schiaparelli 2020 Mission Rover Surface platform © The Terma Group 2016 EXOMARS 2016 14th March 2016 Launched from Baikonur cosmodrome, Kazakhstan © The Terma Group 2016 EXOMARS 2016 16th October 2016 Separation of Schiaparelli from the orbiter © The Terma Group 2016 SCHIAPARELLI Schiaparelli (EDM) - an entry, descent and landing demonstrator module © The Terma Group 2016 EXOMARS 2016 19th October 2016 Landing of Schiaparelli the surface of Mars © The Terma Group 2016 EXOMARS 2016 19th October 2016 Landing of Schiaparelli the surface of Mars © The Terma Group 2016 EXOMARS 2020 © The Terma Group 2016 TERMA AND EXOMARS Terma deliveries to the ExoMars 2016 mission • Remote Terminal Power Unit for Schiaparelli • Mission Control System • Spacecraft Simulator • Support for the Launch and Early Orbit Phase © The Terma Group 2016 ExoMars RTPU The RTPU is a central unit in the Schiaparelli lander. -

Mars Exploration: an Overview of Indian and International Mars Missions Nayamavalsa Scariah1, Dr
Taurian Innovative Journal/Volume 1/ Issue 1 Mars exploration: An overview of Indian and International Mars Missions NayamaValsa Scariah1, Dr. Mili Ghosh2, Dr.A.P.Krishna3 Birla Institute of Technology, Mesra, Ranchi Abstract- Mars is the fourth planet from the sun. It is 1. Introduction also known as red planet because of its iron oxide content. There are lots of missions have been launched to Mars is also known as red planet, because of the mars for better understanding of our neighboring planet. reddish iron oxide prevalent on its surface gives it a There are lots of unmanned spacecraft including reddish appearance. It is the fourth planet from sun. orbiters, landers and rovers have been launched into mars since early 1960. Sputnik was the first satellite The term sol is used to define duration of solar day on launched in 1957 by Soviet Union. After seven failure Mars. A mean Martian solar day or sol is 24 hours 39 missions to Mars, Mariner 4 was the first satellite which minutes and 34.244 seconds. Many space missions to reached the Martian orbiter successfully. The Viking 1 Mars have been planned and launched for Mars was the first lander reached on Mars on 1975. India exploration (Table:1) but most of them failed without successfully launched a spacecraft, Mangalyan (Mars completing the task specially in early attempts th Orbiter Mission) on 5 November, 2013, with five whereas some NASA missions were very payloads to Mars. India was the first nation to successful(such as the twin Mars Exploration Rovers, successfully reach Mars on its first attempt. -

Exomars 2016
University of California, Davis Department of Mechanical and Aerospace Engineering ExoMars 2016 Critical Design Review Final Report David Bartolo Shazib Elahi Aaron Tun Junyi Zhang EAE 198: Intro to Space Vehicles Professor S. K. Robinson 3/23/2019 Contents 1. Introduction 4 1.1 ExoMars 2016 Overview 4 1.1.1 ExoMars Program Vision 4 1.1.2 Timeline of Events 6 1.1.3 Spacecraft and Launch Vehicle Specifications 6 1.2 ExoMars 2016 Mission Stakeholders and Requirements 7 1.3 Mission Objectives 7 1.3.1 Trace Gas Orbiter 7 1.3.2 Schiaparelli EDM 7 1.4 Concept of Operations 8 1.4.1 Space Segment 8 1.4.2 Ground Segment 9 1.5 Subsystems 10 1.5.1 Trace Gas Orbiter 10 1.5.2 Schiaparelli EDM 11 2. Background 12 2.1 Similar Spacecraft 13 2.1.1 Trace Gas Orbiter 13 2.1.2 Schiaparelli EDM 13 2.2 ExoMars 2016 Innovations 13 3. Modifications to Design 14 3.1 Functional Hierarchy Diagram, Analysis/Modification Requirements 14 3.2 Rationale for Chosen Requirements, Potential Benefits and Downsides 15 3.3 Modified Subsystem Requirements 16 4. Analyses 17 4.1 Major Analysis: Power 17 4.1.1 Goals of Analysis 17 4.1.2 Assumptions, Principles, and Methods 17 4.1.2.1 Power Generation and Sources 17 4.1.2.3 Power Regulation and Control 18 4.1.2.4 Power Regulators 19 4.1.2.5 Power Distribution and Heat Dissipation 19 4.1.3 Math, Models, and Code 19 4.1.3.1 Power Generation and Sources 19 2 4.1.3.2 Power Energy Storage 21 4.1.3.3 Power Regulation and Control 21 4.1.3.5 Power Distribution and Heat Dissipation 22 4.1.4 Results 22 4.1.5 Discussion of Importance of Results 26 4.2 Minor Analysis I: Deployable Array Design 26 4.2.1 Goals of Analysis 26 4.2.2 Assumptions, Principles, and Methods 26 4.2.3 Math, Models, and Code 29 4.2.4 Results 32 4.2.5 Discussion of Importance of Results 35 4.3 Minor Analysis II: Influence of Adding Solar Array on Lander 36 4.3.1 Goals of Analysis 36 4.3.2 Assumptions, Principles, and Methods 37 4.3.3 Math, Models, and Code 38 4.3.4 Results 42 4.3.5 Discussion 43 5. -

Mars Exploration - a Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani
Chapter Introductory Chapter: Mars Exploration - A Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani 1. Introduction Mars has been a goal of exploration programs of the most important space agencies all over the world for decades. It is, in fact, the most investigated celestial body of the Solar System. Mars robotic exploration began in the 1960s of the twentieth century by means of several space probes sent by the United States (US) and the Soviet Union (USSR). In the recent past, also European, Japanese, and Indian spacecrafts reached Mars; while other countries, such as China and the United Arab Emirates, aim to send spacecraft toward the red planet in the next future. 1.1 Exploration aims The high number of mission explorations to Mars clearly points out the impor- tance of Mars within the Solar System. Thus, the question is: “Why this great interest in Mars exploration?” The interest in Mars is due to several practical, scientific, and strategic reasons. In the practical sense, Mars is the most accessible planet in the Solar System [1]. It is the second closest planet to Earth, besides Venus, averaging about 360 million kilometers apart between the furthest and closest points in its orbit. Earth and Mars feature great similarities. For instance, both planets rotate on an axis with quite the same rotation velocity and tilt angle. The length of a day on Earth is 24 h, while slightly longer on Mars at 24 h and 37 min. The tilt of Earth axis is 23.5 deg, and Mars tilts slightly more at 25.2 deg [2]. -

Soyuz Launch Brochure
Incredible Adventures is excited to offer a unique opportunity – a chance to visit the famous Baikonur Cosmodrome and observe a manned launch of a Russian Soyuz spacecraft. You’ll be completely immersed in the electric atmosphere surrounding a launch. You’ll explore Baikonur’s launch sites, museums and most historic places. Join IA for an Incredible Space Adventure. Highlights of Your Incredible Baikonur Adventure 800-644-7382 or 941-346-2603 www.incredible-adventures.com Observe roll-out and installation of the Soyuz rocket at launch pad. Attend international press conference of main and back- up crews. See the farewell of the crew at the cosmonaut hotel. Hear crew's ready-to-go official report. See launch of the Soyuz rocket, something you’ll never forget. Incredible Baikonur Adventure Day 1 Meet IA representative at the airport. Flight from Moscow to Baikonur .Transfer to the hotel. Time to relax. Day 2 Breakfast in the hotel Transfer to Baikonur Cosmodrome Roll-out of the Soyuz Rocket. (Follow the Soyuz to its launch site.) Observe installation of the rocket on the launch pad. Visit to the integration building of Soyuz and Progress spaceships. Transfer back to town. Visit to the International Space School. 9 Day 3 Breakfast in the hotel. Visit Museum of History Cosmodrome Baikonur. Enjoy general sightseeing in the town of Baikonur (learn history of the town, visit memorials and monuments). Transfer to Cosmonaut hotel. International press conference with the main and backup crews of Soyuz-TMA vehicle. Walk along the historical alley of Cosmonauts where personalized trees are planted. -
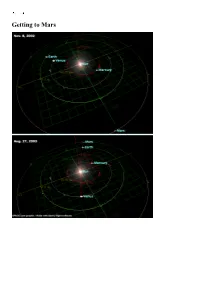
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -

Mars Insight Launch Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Launch Press Kit MAY 2018 www.nasa.gov 1 2 Table of Contents Table of Contents Introduction 4 Media Services 8 Quick Facts: Launch Facts 12 Quick Facts: Mars at a Glance 16 Mission: Overview 18 Mission: Spacecraft 30 Mission: Science 40 Mission: Landing Site 53 Program & Project Management 55 Appendix: Mars Cube One Tech Demo 56 Appendix: Gallery 60 Appendix: Science Objectives, Quantified 62 Appendix: Historical Mars Missions 63 Appendix: NASA’s Discovery Program 65 3 Introduction Mars InSight Launch Press Kit Introduction NASA’s next mission to Mars -- InSight -- will launch from Vandenberg Air Force Base in California as early as May 5, 2018. It is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. A technology demonstration called Mars Cube One (MarCO) will share the launch with InSight and fly separately to Mars. Six Ways InSight Is Different NASA has a long and successful track record at Mars. Since 1965, it has flown by, orbited, landed and roved across the surface of the Red Planet. None of that has been easy. Only about 40 percent of the missions ever sent to Mars by any space agency have been successful. The planet’s thin atmosphere makes landing a challenge; its extreme temperature swings make it difficult to operate on the surface. But if a spacecraft survives the trip, there’s a bounty of science to be collected. -
Final Report for a Robotic Exploration Mission to Mars and Phobos Argos
NASA-CR-197168 NASw-4435 /'/F/ 4 '_/e'7 t'/-q 1- Final Report for a Robotic Exploration Mission to Mars and Phobos PROJECT AENEAS Response to RFP Number ASE274L.0893 o r,4 u_ 4" submitted to: I ,-- ,0 U i'_ C_ e" 0 Z _ 0 Dr. George Botbyl The University of Texas at Austin Department of Aerospace Engineering and Engineering Mechanics Austin, Texas 78712 Z cn _. submitted by: 0 cO_ 0 Argos Space Endeavours 29 November 1993 zxI_f _rOos 8Face _.aea_ours _roJect Aeneas CDestBn _"eam Fall 1993 Chief Executive Officer Justin H. Kerr Chief Engineer Erin Defoss6 Chief Administrator Quang Ho Engineers Emisto Barriga Grant Davis Steve McCourt Matt Smith Aeneas Project Preliminary Design of a Robotic Exploration Mission to Mars and Phobos Approved: Justin H. Kerr CEO, Argos Space Endeavours Approved: Erin Defoss6 Chief Engineer, Argos Space Endeavours Approved: Quang Ho Administrative Officer, Argos Space Endeavours Argos 8pace q .aca ours University of Texas at Austin Department of Aerospace Engineering and Engineering Mechanics November 1993 Acknowledgments Argos Space Endeavours would like to thank all personnel at The University and in industry who made Project Aeneas possible. This project was conducted with the support of the NASA/USRA Advanced Design Program. Argos Space Endeavours wholeheartedly thanks the following faculty, staff, and students from the University of Texas at Austin: Dr. Wallace Fowler, Dr. Ronald Stearman, Dr. John Lundberg, Professor Richard Drury, Dr. David Dolling, Ms. Kelly Spears, Mr. Elfego Piton, Mr. Tony Economopoulos, and Mr. David Garza. The support of Project Aeneas from the aerospace industry was overwhelming. -

SOYUZ THROUGH the AGES the R-7 Rocket That Led to the Family of Soyuz Vehicles Launching Today Lifted Off for the First Time Onfeb
RUSSIAN SPACE SOYUZ THROUGH THE AGES The R-7 rocket that led to the family of Soyuz vehicles launching today lifted off for the first time onFeb. 17, 1959. The last launch, on Dec. 27, 2018, was number 1,898. Irene Klotz and Maxim Pyadushkin Vostochny Cosmodrome anufactured by the Progress Rocket Space Center in Sama- Evolution of Soyuz-Family Launch Vehicles ra, Russia, the medium-lift expendable booster originally was used for Soviet-era human space missions and later became the R-7 Soyuz Soyuz-L workhorse for the country’s civilian and military space programs. M 1957 First launch of the ICBM (SS-6 1966-76 (32 launches, 1970-71 (three launches, Sapwood) that served as a basis for including 30 successful, all successful, The first rocket officially named Soyuz was launched in Soviet/Russian launch vehicles from Baikonur) from Baikonur) 1966 and has since flown 1,050 times, of which 1,023 were including the Soyuz family successful. Production of Soyuz rockets peaked in the early Soyuz 1980s at about 60 vehicles per year. Medium-Class Launch Vehicle Russia began offering Soyuz launch services internationally in the mid-1980s through Glavkosmos, a commercial entity set up to sell Soviet rocket and space technologies. Manufacturer: Progress Rocket Space Soyuz-U/-U2 Soyuz-M Center, Samara, Russia In 1996, Russia created Starsem, a joint venture (35% ArianeGroup, 25% Roscosmos, 25% RKTs Progress, 15% 1991 Breakup of the 1973-2017 1971-76 (eight launches, Soviet Union, (859 launches, including all successful, from Plesetsk) Dimensions Arianespace) that had exclusive rights to provide commercial launch services on Soyuz launch vehicles. -

Inside Wallops
Inside Wallops National Aeronautics and Space Administration Goddard Space Flight Center Wallops Flight Facility, Wallops Island, Virginia Volume XX-0I Number: 01 January 8, 2001 Space Odyssey for NASA Renewed in 2000 Administrators New Years NASA has pioneered the future for accurate maps of Earth ever assembled. Message more than four decades, and the http://www-radar.jpl.nasa.gov/srtm/ What a difference a year makes. The agencys achievements this past year year 1999 tested our character and our are marked by a spirit of cooperation SOHO Sees Turbulent Side of the spirit of exploration. Each of you never-before-seen in the history of Sun responded in 2000, answering those Space exploration. The dream of the A weeks advance warning of potential challenges with a diverse string of first crew to live on the International bad weather in space is now possible impressive achievements. Space Station is realized at a time when thanks to the Solar and Heliospheric nations that were once separated by the Observatory (SOHO) spacecraft. With a technique that uses ripples on the I couldnt be more proud. Today, you Cold War are now joined in a project Suns visible surface to probe its can look into the sky at one of our of discovery. interior, SOHO scientists have, for the bright new stars and literally catch a first time, imaged solar storm regions glimpse of our future as the Inter- The discovery in 2000 of evidence of on the far side of the Sun, the side national Space Station orbits overhead. flowing water on Mars rekindled hopes facing away from the Earth. -

Rocket with Three-Man Crew Lifts Off for Space Station (Update) 28 May 2014
Rocket with three-man crew lifts off for space station (Update) 28 May 2014 two countries over Ukraine. NASA depends on the Russian spacecraft to ferry crews to the space station and pays Russia nearly $71 million per seat. Until last year, Russian spacecraft used to travel two days to reach the station, and this will be only the fifth time that a crew has taken the six-hour "fast-track" route. After the previous launch, in March, the crew ended up taking the longer route because of a software glitch. The Soyuz-FG rocket booster with Soyuz TMA-13M space ship carrying a new crew to the International Space Station, ISS, flies in the sky at the Russian leased Baikonur cosmodrome, Kazakhstan, Thursday, May 29, 2014. Circular star tracks around the Polar Star and track of the rocket a the result of the long time exposure. (AP Photo/Dmitry Lovetsky) A Russian spacecraft carrying a three-man crew docked successfully at the International Space Station on Thursday following a flawless launch. NASA astronaut Reid Wiseman, crew members of the The Soyuz craft, carrying NASA's Reid Wiseman, mission to the International Space Station, ISS, gestures Russian cosmonaut Max Surayev and German prior to the launch of the Soyuz-FG rocket at the Russian Alexander Gerst of the European Space Agency leased Baikonur cosmodrome, Kazakhstan, Wednesday, arrived at the station at 5:44 a.m. (0144 GMT). May 28, 2014. (AP Photo/Dmitry Lovetsky) They lifted off just less than six hours earlier from the Baikonur cosmodrome in Kazakhstan. The Mission Control in Moscow congratulated the trio on a successful docking.