A Custom Printed Circuit Board Design For
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Transistor Circuit Guidebook Byron Wels TAB BOOKSBLUE RIDGE SUMMIT, PA
TAB BOOKS No. 470 34.95 By Byron Wels TransistorCircuit GuidebookByronWels TABBLUE RIDGE BOOKS SUMMIT,PA. 17214 Preface beforemeIa supposepioneer (along the my withintransistor firstthe many field.experiencewith wasother Weknown. World were using WarUnlike solid-stateIIsolid-state GIs) today's asdevices somewhat experimen- receivers marks of FIRST EDITION devicester,ownFirst, withsemiconductors! youwith a choice swipedwhichor tank. ofto a sealed,Here'sexperiment, pairThen ofhow encapsulated, you earphones we carefullywe did had it: from totookand construct the veryonenearest exoticof our the THIRDSECONDFIRST PRINTING-SEPTEMBER PRINTING-AUGUST PRINTING-JANUARY 1972 1970 1968 plane,wasyouAnphonesantenna. emptywound strung jeep,apart After toiletfull outand ofclippingas paper wire,unwoundhigh closelyrollandthe servedascatchthe far spaced.wire offas as itfrom a thewouldsafetyThe thecoil remaining-pin,magnetreach-for form, you inside.which stuckwire the Copyright © 1968by TAB BOOKS coatedNext,it into youneeded,a hunkribbons of -ofwooda razor -steel, soblade.the but point Oh,aItblued was noneprojected placedblade of the -quenchat so fancy right the pointplastic-bluedangles.of -, Reproduction or publicationPrinted inof the ofAmerica the United content States in any manner, with- themindfoundphoneground pin you,the was couldserved right not wired contact lacquerspotas toa onground blade, it. theblued.blade'sAconnector, pin,bayonet bluing,and stuck antennaand you hilt thecould coil.-deep other actuallyIfin ear- youthe isoutherein. assumed express -

JTAG Programmer Overview for Hercules-Based Microcontrollers
Application Report SPNA230–November 2015 JTAG Programmer Overview for Hercules-Based Microcontrollers CharlesTsai ABSTRACT This application report describes the necessary steps needed by the third party developers to create a JTAG-based flash programmer for the Hercules™ family of microcontrollers. This document does not substitute the existing user guides on JTAG access to the target systems and how to program the Flash memory, but rather serves as a central location to reference these documents with clarifications specific to the implementation of the Hercules family of microcontrollers. Contents 1 Introduction ................................................................................................................... 2 2 Hercules JTAG Scan Architecture......................................................................................... 2 3 Creating the Firmware to Program the Flash Memory ................................................................ 22 4 Flash Verification ........................................................................................................... 23 5 References .................................................................................................................. 23 List of Figures 1 Hercules JTAG Scan Architecture......................................................................................... 3 2 Conceptual ICEPICK-C Block Diagram for Hercules Implementation ................................................ 5 3 Fields of the 32-Bit Scan Value for Accessing Mapped Registers -
Page 1 of 19 a Plethora of NE-555 Data
A Plethora Of NE-555 data - NE555 Tutorials Page Page 1 of 19 - - - - - - - - - - - - - - - - Copyright © January 28th 1996 ..... Brought to you by Unitech Electronics Pty. Ltd. Following in the footsteps of the "primitive" but quite successful 4 pin OM802 timer IC manufactured by Philips semiconductor way back in 1969, a new and very innovative IC known as the NE-555 timer IC was released to the masses, being introduced around May 1971 by the then Signetics Corporation, to become known as the NE-555 / SE-555. It was called "The Ubiquitous Timer chip" and was also the very first very mass-produced commercially produced timer IC available at that time.The designers had no real idea what product life it would have, nor how brilliantly successful it would be, lasting well over 25 years still in mass-production today. [1971- 1996 ] The NE-555 would prove to be a " hit " and provide Electronic Engineers, Circuit Designers and a host of "Hobby Tinkerers" with a relatively novel and highly economical timer chip that was indeed very stable at timing all the way up to its maximum timing or oscillating frequency of 200KHz and in a very short time proved to be a very "user-friendly" timer integrated circuit for both simple and complex monostable as well as brilliant astable applications. Invented by a clever Swiss born gentleman by the name of Hans R. Camenzind in 1970, the NE-555 went on to become a legend in the industry, Since this versatile device became commercially available in May 1971, a plethora of highly innovative and very unique and "ever-so-ingenious" circuits has emerged and many circuits have been developed and demonstrated to the "N-th" degree in a variety of reputed "trade-only" journals, professional "Engineering Monthly" Journals as well as the vast numbers of excellent hobbiest publications globally, the likes of SILICON CHIP (SC) and ELEKTOR , Practical Electronics (PE) , Electronics Australia (EA) and Electronics Today International (ETI) to name but just a few. -
Electronic Circuit Design and Component Selecjon
Electronic circuit design and component selec2on Nan-Wei Gong MIT Media Lab MAS.S63: Design for DIY Manufacturing Goal for today’s lecture • How to pick up components for your project • Rule of thumb for PCB design • SuggesMons for PCB layout and manufacturing • Soldering and de-soldering basics • Small - medium quanMty electronics project producMon • Homework : Design a PCB for your project with a BOM (bill of materials) and esMmate the cost for making 10 | 50 |100 (PCB manufacturing + assembly + components) Design Process Component Test Circuit Selec2on PCB Design Component PCB Placement Manufacturing Design Process Module Test Circuit Selec2on PCB Design Component PCB Placement Manufacturing Design Process • Test circuit – bread boarding/ buy development tools (breakout boards) / simulaon • Component Selecon– spec / size / availability (inventory! Need 10% more parts for pick and place machine) • PCB Design– power/ground, signal traces, trace width, test points / extra via, pads / mount holes, big before small • PCB Manufacturing – price-Mme trade-off/ • Place Components – first step (check power/ground) -- work flow Test Circuit Construc2on Breadboard + through hole components + Breakout boards Breakout boards, surcoards + hookup wires Surcoard : surface-mount to through hole Dual in-line (DIP) packaging hap://www.beldynsys.com/cc521.htm Source : hap://en.wikipedia.org/wiki/File:Breadboard_counter.jpg Development Boards – good reference for circuit design and component selec2on SomeMmes, it can be cheaper to pair your design with a development -

Integrated Circuits
CHAPTER67 Learning Objectives ➣ What is an Integrated Circuit ? ➣ Advantages of ICs INTEGRATED ➣ Drawbacks of ICs ➣ Scale of Integration CIRCUITS ➣ Classification of ICs by Structure ➣ Comparison between Different ICs ➣ Classification of ICs by Function ➣ Linear Integrated Circuits (LICs) ➣ Manufacturer’s Designation of LICs ➣ Digital Integrated Circuits ➣ IC Terminology ➣ Semiconductors Used in Fabrication of ICs and Devices ➣ How ICs are Made? ➣ Material Preparation ➣ Crystal Growing and Wafer Preparation ➣ Wafer Fabrication ➣ Oxidation ➣ Etching ➣ Diffusion ➣ Ion Implantation ➣ Photomask Generation ➣ Photolithography ➣ Epitaxy Jack Kilby would justly be considered one of ➣ Metallization and Intercon- the greatest electrical engineers of all time nections for one invention; the monolithic integrated ➣ Testing, Bonding and circuit, or microchip. He went on to develop Packaging the first industrial, commercial and military ➣ Semiconductor Devices and applications for this integrated circuits- Integrated Circuit Formation including the first pocket calculator ➣ Popular Applications of ICs (pocketronic) and computer that used them 2472 Electrical Technology 67.1. Introduction Electronic circuitry has undergone tremendous changes since the invention of a triode by Lee De Forest in 1907. In those days, the active components (like triode) and passive components (like resistors, inductors and capacitors etc.) of the circuits were separate and distinct units connected by soldered leads. With the invention of the transistor in 1948 by W.H. Brattain and I. Bardeen, the electronic circuits became considerably reduced in size. It was due to the fact that a transistor was not only cheaper, more reliable and less power consuming but was also much smaller in size than an electron tube. To take advantage of small transistor size, the passive components too were greatly reduced in size thereby making the entire circuit very small. -

Intel Quartus Prime Pro Edition User Guide: Programmer Send Feedback
Intel® Quartus® Prime Pro Edition User Guide Programmer Updated for Intel® Quartus® Prime Design Suite: 21.2 Subscribe UG-20134 | 2021.07.21 Send Feedback Latest document on the web: PDF | HTML Contents Contents 1. Intel® Quartus® Prime Programmer User Guide..............................................................4 1.1. Generating Primary Device Programming Files........................................................... 5 1.2. Generating Secondary Programming Files................................................................. 6 1.2.1. Generating Secondary Programming Files (Programming File Generator)........... 7 1.2.2. Generating Secondary Programming Files (Convert Programming File Dialog Box)............................................................................................. 11 1.3. Enabling Bitstream Security for Intel Stratix 10 Devices............................................ 18 1.3.1. Enabling Bitstream Authentication (Programming File Generator)................... 19 1.3.2. Specifying Additional Physical Security Settings (Programming File Generator).............................................................................................. 21 1.3.3. Enabling Bitstream Encryption (Programming File Generator).........................22 1.4. Enabling Bitstream Encryption or Compression for Intel Arria 10 and Intel Cyclone 10 GX Devices.................................................................................................. 23 1.5. Generating Programming Files for Partial Reconfiguration......................................... -

35402 Electronic Circuit R TG
Electricity and Electronics Electronic Circuit Repair Introduction The purpose of this video is to help you quickly learn the most common methods used to trou- bleshoot electronic circuits. Electronic troubleshooting skills are needed to diagnose and repair several types of devices. These devices include stereos, cameras, VCRs, and much more. As mentioned, the program will explain how to diagnose and repair different types of electronic com- ponents and circuits. Viewers will also learn how to use the specialized tools and instruments needed to test these particular types of circuits and components. If students plan to enter any type of electronics field, viewing this program will prove to be beneficial. The program is organized into major sections or topics. Each section covers one major segment of the subject. Graphic breaks are given between each section so that you can stop the video for class discussion, demonstrations, to answer questions, or to ask questions. This allows you to watch only a portion of the program each day, or to present it in its entirety. This program is part of the ten-part series Electricity and Electronics, which includes the following titles: • Electrical Principles • Electrical Circuits: Ohm's Law • Electrical Components Part I: Resistors/Batteries/Switches • Electrical Components Part II: Capacitors/Fuses/Flashers/Coils • Electrical Components Part III: Transformers/Relays/Motors • Electronic Components Part I: Semiconductors/Transistors/Diodes • Electronic Components Part II: Operation—Transistors/Diodes • Electronic Components Part III: Thyristors/Piezo Crystals/Solar Cells/Fiber Optics • Electrical Troubleshooting • Electronic Circuit Repair To order additional titles please see Additional Resources at www.filmsmediagroup.com at the end of this guide. -

Hematopoietic and Lymphoid Neoplasm Coding Manual
Hematopoietic and Lymphoid Neoplasm Coding Manual Effective with Cases Diagnosed 1/1/2010 and Forward Published August 2021 Editors: Jennifer Ruhl, MSHCA, RHIT, CCS, CTR, NCI SEER Margaret (Peggy) Adamo, BS, AAS, RHIT, CTR, NCI SEER Lois Dickie, CTR, NCI SEER Serban Negoita, MD, PhD, CTR, NCI SEER Suggested citation: Ruhl J, Adamo M, Dickie L., Negoita, S. (August 2021). Hematopoietic and Lymphoid Neoplasm Coding Manual. National Cancer Institute, Bethesda, MD, 2021. Hematopoietic and Lymphoid Neoplasm Coding Manual 1 In Appreciation NCI SEER gratefully acknowledges the dedicated work of Drs, Charles Platz and Graca Dores since the inception of the Hematopoietic project. They continue to provide support. We deeply appreciate their willingness to serve as advisors for the rules within this manual. The quality of this Hematopoietic project is directly related to their commitment. NCI SEER would also like to acknowledge the following individuals who provided input on the manual and/or the database. Their contributions are greatly appreciated. • Carolyn Callaghan, CTR (SEER Seattle Registry) • Tiffany Janes, CTR (SEER Seattle Registry) We would also like to give a special thanks to the following individuals at Information Management Services, Inc. (IMS) who provide us with document support and web development. • Suzanne Adams, BS, CTR • Ginger Carter, BA • Sean Brennan, BS • Paul Stephenson, BS • Jacob Tomlinson, BS Hematopoietic and Lymphoid Neoplasm Coding Manual 2 Dedication The Hematopoietic and Lymphoid Neoplasm Coding Manual (Heme manual) and the companion Hematopoietic and Lymphoid Neoplasm Database (Heme DB) are dedicated to the hard-working cancer registrars across the world who meticulously identify, abstract, and code cancer data. -

What We Know About Testing Embedded Software
What we know about testing embedded software Vahid Garousi, Hacettepe University and University of Luxembourg Michael Felderer, University of Innsbruck Çağrı Murat Karapıçak, KUASOFT A.Ş. Uğur Yılmaz, ASELSAN A.Ş. Abstract. Embedded systems have overwhelming penetration around the world. Innovations are increasingly triggered by software embedded in automotive, transportation, medical-equipment, communication, energy, and many other types of systems. To test embedded software in a cost effective manner, a large number of test techniques, approaches, tools and frameworks have been proposed by both practitioners and researchers in the last several decades. However, reviewing and getting an overview of the entire state-of-the- art and the –practice in this area is challenging for a practitioner or a (new) researcher. Also unfortunately, we often see that some companies reinvent the wheel (by designing a test approach new to them, but existing in the domain) due to not having an adequate overview of what already exists in this area. To address the above need, we conducted a systematic literature review (SLR) in the form of a systematic mapping (classification) in this area. After compiling an initial pool of 560 papers, a systematic voting was conducted among the authors, and our final pool included 272 technical papers. The review covers the types of testing topics studied, types of testing activity, types of test artifacts generated (e.g., test inputs or test code), and the types of industries in which studies have focused on, e.g., automotive and home appliances. Our article aims to benefit the readers (both practitioners and researchers) by serving as an “index” to the vast body of knowledge in this important and fast-growing area. -

S5U1C88816P Manual (Peripheral Circuit Board for S1C88816/8F360)
MF1337-02a CMOS 8-BIT SINGLE CHIP MICROCOMPUTER S5U1C88816P Manual (Peripheral Circuit Board for S1C88816/8F360) NOTICE No part of this material may be reproduced or duplicated in any form or by any means without the written permission of Seiko Epson. Seiko Epson reserves the right to make changes to this material without notice. Seiko Epson does not assume any liability of any kind arising out of any inaccuracies contained in this material or due to its application or use in any product or circuit and, further, there is no representation that this material is applicable to products requiring high level reliability, such as medical products. Moreover, no license to any intellectual property rights is granted by implication or otherwise, and there is no representation or warranty that anything made in accordance with this material will be free from any patent or copyright infringement of a third party. This material or portions thereof may contain technology or the subject relating to strategic products under the control of the Foreign Exchange and Foreign Trade Law of Japan and may require an export license from the Ministry of International Trade and Industry or other approval from another government agency. © SEIKO EPSON CORPORATION 2001 All rights reserved. Configuration of product number Devices S1 C 88104 F 0A01 00 Packing specifications 00 : Besides tape & reel 0A : TCP BL 2 directions 0B : Tape & reel BACK 0C : TCP BR 2 directions 0D : TCP BT 2 directions 0E : TCP BD 2 directions 0F : Tape & reel FRONT 0G : TCP BT 4 directions 0H -

The Effect of Muscular Exercise on the Blood Ammonia Concentration in Man
Yale University EliScholar – A Digital Platform for Scholarly Publishing at Yale Yale Medicine Thesis Digital Library School of Medicine 1959 The effect of muscular exercise on the blood ammonia concentration in man. With particular reference to patients with Laennec's Cirrhosis Scott nI gram Allen Yale University Follow this and additional works at: http://elischolar.library.yale.edu/ymtdl Recommended Citation Allen, Scott nI gram, "The effect of muscular exercise on the blood ammonia concentration in man. With particular reference to patients with Laennec's Cirrhosis" (1959). Yale Medicine Thesis Digital Library. 2334. http://elischolar.library.yale.edu/ymtdl/2334 This Open Access Thesis is brought to you for free and open access by the School of Medicine at EliScholar – A Digital Platform for Scholarly Publishing at Yale. It has been accepted for inclusion in Yale Medicine Thesis Digital Library by an authorized administrator of EliScholar – A Digital Platform for Scholarly Publishing at Yale. For more information, please contact [email protected]. VALE UNIVERSITY LIBRARY 3 9002 067 2 1757 CONCENTRATION IN MAN .A ixMt* MUDD LIBRARY Medical YALE MEDICAL LIBRARY Digitized by the Internet Archive in 2017 with funding from The National Endowment for the Humanities and the Arcadia Fund https://archive.org/details/effectofmuscularOOalle THE EFFECT OF MUSCULAR EXERCISE OH THE BLOOD AMMONIA CONCENTRATION IN MAN With Particular Reference To Patients With Laennec's Cirrhosis by Scott I. Allen, A.B. Nl Pomona College, 1955 A Thesis Submitted to the Faculty of the Yale University School of Medicine In Candidacy for the Degree of Doctor of Medicine Department of Internal. -
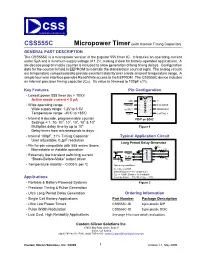
CSS555C Micropower Timer (With Internal Timing Capacitor) GENERAL PART DESCRIPTION the CSS555C Is a Micropower Version of the Popular 555 Timer IC
css Custom Silicon Solutions, Inc. CSS555C Micropower Timer (with Internal Timing Capacitor) GENERAL PART DESCRIPTION The CSS555C is a micropower version of the popular 555 timer IC. It features an operating current under 5µA and a minimum supply voltage of 1.2V, making it ideal for battery-operated applications. A six-decade programmable counter is included to allow generation of long timing delays. Configuration data for the counter is held in EEPROM to maintain the standard pin count of eight. The analog circuits are temperature compensated to provide excellent stability over a wide ambient temperature range. A simple four-wire interface provides Read/Write access to the EEPROM. The CSS555C device includes an internal precision timing capacitor (C TI ). Its value is trimmed to 100pF ±1%. Key Features Pin Configuration • Lowest power 555 timer (by > 10X)! Active mode current < 5 µA GND 1 CSS555C 8 V+ • Wide operating range TRIGGER 2 7 DISCHARGE Wide supply range: 1.2V to 5.5V OUTPUT 3 6 THRESHOLD Temperature range: -40°C to +85°C RESET 4 5 CONTROL V • Internal 6 decade, programmable counter PDIP or SOIC Settings = 1, 10, 10 2, 10 3, 10 4, 10 5 & 10 6 Multiplies delay time by up to 10 6 Figure 1 Delay times from microseconds to days • Internal 100pF, ±1% Timing Capacitor Typical Application Circuit User adjustable, 0.2pF resolution Long Period Delay Generator • Pin-for-pin compatible with 555 series timers VDD CSS555C RA Monostable or Astable operation 1 8 • Extremely low transient switching current Trigger 2 7 Output 3 6 RB “Break-Before-Make”