AADL-Based Flight Management System Modeling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Using an Autothrottle to Compare Techniques for Saving Fuel on A
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2010 Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft Rebecca Marie Johnson Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Electrical and Computer Engineering Commons Recommended Citation Johnson, Rebecca Marie, "Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft" (2010). Graduate Theses and Dissertations. 11358. https://lib.dr.iastate.edu/etd/11358 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Using an autothrottle to compare techniques for saving fuel on A regional jet aircraft by Rebecca Marie Johnson A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Electrical Engineering Program of Study Committee: Umesh Vaidya, Major Professor Qingze Zou Baskar Ganapathayasubramanian Iowa State University Ames, Iowa 2010 Copyright c Rebecca Marie Johnson, 2010. All rights reserved. ii DEDICATION I gratefully acknowledge everyone who contributed to the successful completion of this research. Bill Piche, my supervisor at Rockwell Collins, was supportive from day one, as were many of my colleagues. I also appreciate the efforts of my thesis committee, Drs. Umesh Vaidya, Qingze Zou, and Baskar Ganapathayasubramanian. I would also like to thank Dr. -

Ac 120-67 3/18/97
Advisory u.s. Department ofTransportation Federal Aviation Circular Ad.nnlstratlon Subject: CRITERIA FOR OPERATIONAL Date: 3/18/97 AC No: 120-67 APPROVAL OF AUTO FLIGHT Initiated By: AFS-400 Change: GUIDANCE SYSTEMS 1. PURPOSE. This advisory circular (AC) states an acceptable means, but not the only means, for obtaining operational approval of the initial engagement or use of an Auto Flight Guidance System (AFGS) under Title 14 of the Code of Federal Regulations (14 CFR) part 121, section 121.579(d); part 125, section 125.329(e); and part 135, section 135.93(e) for the takeoff and initial climb phase of flight. 2. APPLICABILITY. The criteria contained in this AC are applicable to operators using commercial turbojet and turboprop aircraft holding Federal Aviation Administration (FAA) operating authority issued under SPAR 38-2 and 14 CFR parts 119, 121, 125, and 135. The FAA may approve the AFGS operation for the operators under these parts, where necessary, by amending the applicant's operations specifications (OPSPECS). 3. BACKGROUND. The purpose of this AC is to take advantage of technological improvements in the operational capabilities of autopilot systems, particularly at lower altitudes. This AC complements a rule change that would allow the use of an autopilot, certificated and operationally approved by the FAA, at altitudes less than 500 feet above ground level in the vertical plane and in accordance with sections 121.189 and 135.367, in the lateral plane. 4. DEFINITIONS. a. Airplane Flight Manual (AFM). A document (under 14 CFR part 25, section 25.1581) which is used to obtain an FAA type certificate. -

ICAO Version Finale
Thales Presentation > ICAO NGAP Symposium March 2010 Francis ARCHAMBAULT – Director, Marketing and Product Policy Benoît THUBERT – Advance Project Design Authority Aerospace Agenda THALES Avionics system development in recent History AIRBUS, BOMBARDIER, GULFSTREAM, ATR, EMBRAER, SUKHOI Interactive Cockpit Display Systems, Flight Management Systems, Integrated Modular Avionics, Electronic Flight Controls Computers, Head-Up Displays, Enhanced Vision Systems, IFE. THALES Innovation NEW TECHNOLOGIES Flight Deck Innovation Strategy, Global Environment – Thales actions & major Industry initiatives, R&D and emerging technologies – some considerations, Avionics evolving Business Model, New generation of flight crew & new approach to develop flight deck, Competency and training methods, Bridging the gap between pilots and systems, New interaction languages, Helping pilots to handle complexity. March 2010 March THALES Training Technologies 2 This document is the property of Thales Group and may not be copi ed or communicated without written consent of Thales > Thales Recent Avionics developments Aerospace Thales - intelligence onboard Connectivity - SATCOM Integrated Modular Avionics Cockpit Display + HUD + EVS Electrical Power Flight Guidance Generation / Conversion Flight Management Communication, Navigation, Surveillance Flight Controls Utilities: Braking Steering Fuel Engine Controls In-Flight Entertainment Systems Doors & Slides Cabin lighting March 2010 March Integrated Maintenance Cabin interiors floor to floor 4 This document -
Accessibility to In-Flight Entertainment for Deaf and Hard of Hearing Passengers Michael A
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Southern Methodist University Journal of Air Law and Commerce Volume 77 | Issue 1 Article 3 2012 Propelling Aviation to New Heights: Accessibility to In-Flight Entertainment for Deaf and Hard of Hearing Passengers Michael A. Schwartz Follow this and additional works at: https://scholar.smu.edu/jalc Recommended Citation Michael A. Schwartz, Propelling Aviation to New Heights: Accessibility to In-Flight Entertainment for Deaf and Hard of Hearing Passengers, 77 J. Air L. & Com. 151 (2012) https://scholar.smu.edu/jalc/vol77/iss1/3 This Article is brought to you for free and open access by the Law Journals at SMU Scholar. It has been accepted for inclusion in Journal of Air Law and Commerce by an authorized administrator of SMU Scholar. For more information, please visit http://digitalrepository.smu.edu. PROPELLING AVIATION TO NEW HEIGHTS: ACCESSIBILITY TO IN-FLIGHT ENTERTAINMENT FOR DEAF AND HARD OF HEARING PASSENGERS MICHAEL A. SCHWARTZ* TABLE OF CONTENTS ABSTRACT ............................................... 151 I. INTRODUCTION .................................. 152 II. AIR CARRIER ACCESS ACT OF 1986 ............. 157 III. COURTS DO NOT ACKNOWLEDGE A PRIVATE RIGHT OF ACTION ............................... 162 IV. THE LACK OF CONGRESSIONAL ACTION ...... 165 V. THE DOT'S INACTION REGARDING IFE CAPTIONING ...................................... 166 VI. THE IRONY: ACCESSIBLE IN-FLIGHT ENTERTAINMENT IS AVAILABLE NOW ......... 171 VII. A CALL TO ACTION .............................. 174 ABSTRACT In-flight entertainment has been available for over forty-five years but to this day remains without captions or subtitles, thus depriving deaf and hard of hearing passengers of access to this service. -
Accessibility to In-Flight Entertainment for Deaf and Hard of Hearing Passengers Michael A
Journal of Air Law and Commerce Volume 77 | Issue 1 Article 3 2012 Propelling Aviation to New Heights: Accessibility to In-Flight Entertainment for Deaf and Hard of Hearing Passengers Michael A. Schwartz Follow this and additional works at: https://scholar.smu.edu/jalc Recommended Citation Michael A. Schwartz, Propelling Aviation to New Heights: Accessibility to In-Flight Entertainment for Deaf and Hard of Hearing Passengers, 77 J. Air L. & Com. 151 (2012) https://scholar.smu.edu/jalc/vol77/iss1/3 This Article is brought to you for free and open access by the Law Journals at SMU Scholar. It has been accepted for inclusion in Journal of Air Law and Commerce by an authorized administrator of SMU Scholar. For more information, please visit http://digitalrepository.smu.edu. PROPELLING AVIATION TO NEW HEIGHTS: ACCESSIBILITY TO IN-FLIGHT ENTERTAINMENT FOR DEAF AND HARD OF HEARING PASSENGERS MICHAEL A. SCHWARTZ* TABLE OF CONTENTS ABSTRACT ............................................... 151 I. INTRODUCTION .................................. 152 II. AIR CARRIER ACCESS ACT OF 1986 ............. 157 III. COURTS DO NOT ACKNOWLEDGE A PRIVATE RIGHT OF ACTION ............................... 162 IV. THE LACK OF CONGRESSIONAL ACTION ...... 165 V. THE DOT'S INACTION REGARDING IFE CAPTIONING ...................................... 166 VI. THE IRONY: ACCESSIBLE IN-FLIGHT ENTERTAINMENT IS AVAILABLE NOW ......... 171 VII. A CALL TO ACTION .............................. 174 ABSTRACT In-flight entertainment has been available for over forty-five years but to this day remains without captions or subtitles, thus depriving deaf and hard of hearing passengers of access to this service. The Air Carrier Access Act of 1986 (ACAA) and imple- menting regulations do not require captioning of in-flight en- tertainment, and Congress, the airline industry, and the U.S. -
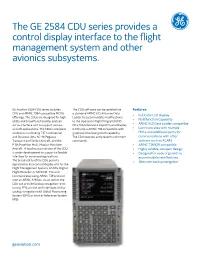
The GE 2584 CDU Series Provides a Control Display Interface to the Flight Management System and Other Avionics Subsystems
The GE 2584 CDU series provides a control display interface to the flight management system and other avionics subsystems. GE Aviation 2584 CDU series includes The CDU software can be updated via Features: CDU and ARINC 739A compatible MCDU a standard ARINC 615 Airborne Data • Full Color LCD Display offerings. The CDUs are designed for high Loader to accommodate modifications • Multifunction Capability utility and broad functionality, and can to the Operation Flight Program (OFP). act as interface unit to support various GE’s CDUs feature a Liquid Crystal Display • ARINC 615 Data Loader compatible aircraft applications. The CDU is standard (LCD) and is ARINC 739 compatible with • Communicates with multiple production on Boeing 737 Commercial graphical interface growth capability. FMCs and additional ports for and Business Jets, KC-46 Pegasus The CDU receives and presents color text communications with other Transport and Tanker Aircraft, and the commands. systems such as ACARS P-8A Poseidon Multi-Mission Maritime • ARINC 739/429 compatible Aircraft. A touchscreen version of the CDU • Highly reliable, compact design is under development to support a flexible • Designed for ease of growth to interface for advanced applications. accommodate new features The broad utility of the CDU permits • Alternate backup navigation applications as a control display unit for the Flight Management System, ACARS, Digital Flight Recorder or SATCOM. The unit communicates using ARINC 739 protocol over an ARINC 429 bus. As an option the CDU can provide backup navigation radio tuning, EFIS control and interfaces and/or backup navigation with Global Positioning System (GPS) or Inertial Reference System (IRS). -

Hawker 800XP Pro Line 21 Airplane Flight Manual SECTION 2 LIMITATIONS Table of Contents Page
Hawker 800XP Pro Line 21 Airplane Flight Manual SECTION 2 LIMITATIONS Table of Contents Page KINDS OF OPERATION.................................................................................... 3 WEIGHT LIMITATIONS ..................................................................................... 3 PERFORMANCE LIMITATIONS ....................................................................... 3 Take-off Weight........................................................................................... 3 Landing Weight .......................................................................................... 3 Take-off Field Length .................................................................................. 4 OPERATIONAL LIMITATIONS.......................................................................... 4 Altitude ........................................................................................................ 4 Maximum Permissible Altitude .................................................................... 4 Air Temperature .......................................................................................... 4 Wind Component ........................................................................................ 4 Runway Slope ............................................................................................. 5 Airplane Configurations............................................................................... 5 COMPARTMENT LOADING LIMITATIONS ...................................................... 5 -

Category 7—Page 1
Commerce Control List Supplement No. 1 to Part 774 Category 7—page 1 CATEGORY 7 - NAVIGATION AND accelerometers that are “specially AVIONICS designed” and developed as Measurement While Drilling (MWD) sensors for use in downhole well service applications. A. “END ITEMS,” “EQUIPMENT,” Related Definitions: N/A “ACCESSORIES,” “ATTACHMENTS,” Items: “PARTS,” “COMPONENTS,” AND “SYSTEMS” a. Linear accelerometers having any of the following: N.B.1: For automatic pilots for underwater a.1. Specified to function at linear vehicles, see Category 8. For radar, see acceleration levels less than or equal to 15 g and Category 6. having any of the following: a.1.a. A “bias” “stability” of less 7A001 Accelerometers as follows (see List of (better) than 130 micro g with respect to a fixed Items Controlled) and “specially designed” calibration value over a period of one year; or “components” therefor. a.1.b. A “scale factor” “stability” of less License Requirements (better) than 130 ppm with respect to a fixed calibration value over a period of one year; Reason for Control: NS, MT, AT a.2. Specified to function at linear Country acceleration levels exceeding 15 g but less than Chart (See or equal to 100 g and having all of the following: Control(s) Supp. No. 1 to part 738) a.2.a. A “bias” “repeatability” of less NS applies to entire entry NS Column 1 (better) than 1,250 micro g over a period of one MT applies to commodities MT Column year; and that meet or exceed the 1 parameters of 7A101. a.2.b. A “scale factor” “repeatability” AT applies to entire entry AT Column 1 of less (better) than 1,250 ppm over a period of one year; or List Based License Exceptions (See Part 740 for a description of all license exceptions) a.3. -

Ac 25-15 11/20/89
Advisory us. Departmenf of Tronsportafion Federal Aviation Circular Administration Subject: APPROVAL OF FLIGHT MANAGEMENT Date: 11/20/89 AC No: 25-15 SYSTEMS IN TRANSPORT CATEGORY Initiated by: ANM-110 Change: AIRPLANES 1. PURPOSE. This advisory circular (AC) provides guidance material for the airworthiness approval of flight management systems (FMS} in transport category airplanes. Like all AC material, this AC is not mandatory and does not constitute a regulation. It is issued for guidance purposes and to outline a method of compliance with the rules. In lieu of following this method without deviation, the applicant may elect to follow an alternate method, provided the alternate method is also found by the Federal Aviation Administration (FAA} to be an acceptable means of complying with the requirements of Part 25. Because the method of compliance presented in this AC is not mandatory, the terms II sha11" and "must II used herein apply on1y to an applicant who chooses to follow this particular method without deviation. 2. RELATED DOCUMENTS. a. Related Federal Aviation Regulations {FAR}. Portions of Part 25 and a portion of Part 121, as presently written, can be applied for the design, substantiation, and certification of FMS for transport category airplanes. Sections which prescribe requirements for these types of systems include: § 25.101 Performance: General. § 25 .103 Stalling speed. § 25.105 Takeoff. § 25.107 Takeoff speeds. § 25.109 Accelerate-stop distance. § 25.111 Takeoff path. § 25.113 Takeoff distance and takeoff run. § 25.115 Takeoff flight path. § 25.117 Climb: general. § 25.119 Landing climb: All-engines-operating. § 25.121 Climb: One-engine-inoperative. -

Merging Autopilot/Flight Control and Navigation-Flight Management Systems
American J. of Engineering and Applied Sciences 3 (4): 629-630, 2010 ISSN 1941-7020 © 2010 Science Publications Merging Autopilot/Flight Control and Navigation-Flight Management Systems Khaleel Qutbodin Department of Aerospace Engineering, Faculty of Mechanical Engineering, International Islamic University of Malaysia, Malaysia Abstract: In this abstract the following commercial aircraft 3 avionics systems will be merged together: (1) Autopilot Flight Director System (APFDS), (2) Flight Control System (FCS) and (3) Flight Management Systems (FMS). Problem statement: These systems perform functions that are dependant and related to each other, also they consists of similar hardware components. Each of these systems consists of at least one computer, control panel and displays that place on view the selection and aircraft response. They receive several similar sensor inputs, or outputs of one system are fed as input to the other system. By combining the three systems, repeated and related functions are reduced. Since these systems perform related functions, designers and programmers verify that conflict between these systems is not present. Combining the three systems will eliminate such possibility. Also used space, weight, wires and connections are decreased, consequently electrical consumption is reduced. To keep redundancy, the new system can be made of multiple channels. Approach: The new system (called Autopilot Navigation Management System, APNMS) is more efficient and resolves the above mention drawbacks. Results: The APFDS system functions (as attitude-hold or heading-hold) are merged with the FCS system main function which is controlling flight control surfaces as well as other functions as flight protection, Turn coordination and flight stability augmentation. Also the Flight Management system functions (as flight planning, aircraft flight performance/engine thrust management) are merged in the new system. -
Operational Suitability Data (OSD) Flight Crew
Cessna 525ALLOSDFC-01 Document Reference # Signature MARCUS S.VANDERPOOL, Pilot and Maintenance Training, Textron Aviation Operational Suitability Data (OSD) Flight Crew CESSNA 525, 525A, 525B, 525C (CJ, CJ1, CJ2, CJ1+, CJ2+, CJ3, CJ3+, CJ4, M2) Rev. 1 28 July 2015 Operational Suitability Data – Flight Crew C525 CESSNA 525, 525A, 525B, 525C (CJ, CJ1, CJ2, CJ1+, CJ2+, CJ3, CJ3+, CJ4, M2) Operational Suitability Data (OSD) – Flight Crew Revision Record Rev. No. Content Date OEB Report Operational Evaluation Board Report Cessna 525 22 Oct 2010 Rev 2 (CJ, CJ1, CJ2, CJ1+, CJ2+, CJ3) OEB Report Operational Evaluation Board Report Cessna 22 Oct 2010 Rev 1 Citation 525C (CJ4) Replaces and incorporates the OEB reports for the Cessna 525 (CJ, CJ1, CJ2, CJ1+, CJ2+, CJ3) and OSD FC for the Cessna 525 (CJ4). 20 Jun 2014 Original Addition of the Cessna 525 M2 operational suitability data. OSD FC OSD Data for Cessna 525 CJ3+ incorporated. 28 Jul 2015 Rev 1 OSD FC C525 – Revision 1 Page 2 of 42 Operational Suitability Data – Flight Crew C525 Contents Revision Record ........................................................................................................................ 2 Contents ................................................................................................................................... 3 Acronyms .................................................................................................................................. 5 Preamble ................................................................................................................................. -

Powerplant Trainers Avionics & Instruments
Train for Tomorrow...TODAY s uct . od p Pr r g o in C in ra n T i e a c Powerplant Trainers r n a T n o e r t in e a M Aircraft Systems Trainers A ft a r c r i A Avionics & Instruments Trainers Computer Based Training Courseware Catalog 0113 Introduction AeroTrain Corp. has gone through an evolutionary Besides supplying training aids, AeroTrain Corp. also process from a modest start in 1995 as a dba (doing offers consulting services for the development of Federal business as) company named ‘Systems Solutions’ to Aviation Administration (FAA) Part 147 and European a Michigan-incorporated company in April 2001 as Aviation Safety Agency (EASA) part 147 approved ‘Avitek Engineering Corporation’. The company name curricula for aircraft maintenance training schools. We was changed to the current name ‘AeroTrain Corp.’ have recently begun offering our consultation services in 2006 to show our total focus on aircraft training to universities for the establishment of undergraduate products. degree programs in Aerospace Engineering, and in Avionics Engineering. With a customer base spread in 23 countries, AeroTrain is your one-stop source for aircraft maintenance We look forward to expanding our customer base training equipment needs. We have sound expertise in and are continuously striving to improve our product developing standard and customized training-aids for quality and capabilities, to ensure on-time deliveries, aircraft systems training. and to provide excellent after sales support. Our expertise includes design and development of training-aids for avionics, aircraft engines, aircraft systems, instruments, and electrical systems relevant to aircraft maintenance training.