Aggregate Waiting Time Reduction on Public Transportation Networks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Finding Your Way to Oxford: a Guide for New International Students
Finding Your Way to Oxford: Arriving at Terminal 1, 2 or 3: follow the signs in the arrival hall to the Central Bus A Guide for New International Station, then take the lift up to the bus station Students and you will arrive in the ticket hall. Arriving at Terminal 4: follow the signs in the arrival hall to ‘the trains’ and take the free Welcome to the UK. We hope you will settle in Heathrow Connect train service to ‘Heathrow comfortably during your first few days here. There Central’; a three-minute train journey. Follow are good public transport links to Oxford, and you the signs to the Central Bus Station, take the will be able to use public transport to get here from lift up to the bus station and you will arrive in wherever you arrive in the UK—services the ticket hall. generally run throughout the day and night. Arriving at Terminal 5: the bus service to Oxford also departs from Terminal 5 next to Below are details on bus services operating from the arrival area (stop 10), so you do not need Heathrow, Gatwick and Stansted airports, and to go to the Central Bus Station. details about Eurostar if you plan to come via rail. Gatwick Airport A similar bus service operates from Gatwick to Oxford (see the website below) with buses departing every hour. The bus journey is longer than the journey from Heathrow: between 2 hours and 2 hours 30 minutes. Arriving at Gatwick North Terminal: the bus leaves from Lower Forecourt stands 4 and 5. -

North West Region Cheshire and North Wales
NATIONS, REGIONS & GROUPS NORTH WEST REGION LONDON REGION CHESHIRE AND NORTH WALES GROUPS HEATHROW GROUP Borderlands (Wrexham to Bidston) rail line Crossrail becomes Elizabeth Line full house greeted speaker John Goldsmith, Community A Relations Manager for Crossrail. Some 43km of new tunnelling is now complete under central London, and 65 million tonnes of material have been excavated. Building work on the whole line is now 87% complete. The first trains of the new Elizabeth Line are now in service between Liverpool Street and Shenfield where a new platform has been built for them, and the roof garden at the seven-storey Canary Wharf station has been open for some time. The 70 trains, built in Derby by Bombardier, are some 10–15% lighter than those now in use and will be in nine-car sets, 200m long, seating 450 passengers, with an estimated total capacity including standing passengers of 1,500 at peak times, most of The Borderlands line runs from Wrexham Central Station to Bidston Station whom are expected to be short-journey passengers. Seats will be sideways, forward facing and backward facing, giving plenty of his event was held in the strategic location of Chester, circulating space. The early trains now in service between T close to the border between England and Wales. The Liverpool Street and Shenfield are only seven cars long, because location chosen was apt, as the Borderlands line is a key the main line platforms at Liverpool Street will not accept nine-car strategic passenger route between North Wales and Merseyside. trains, but this is an interim measure until the lower level new John Allcock, Chairman, Wrexham–Bidston Rail Users’ Association station is operative. -

London Heathrow Airport
London Heathrow Airport Located 20 miles to the west of Central London. www.heathrowairport.com Heathrow Airport by Train The Heathrow Express is the fastest way to travel into Central London. Trains leave Heathrow Airport from approximately 5.12am until 11.40pm. For more information, and details of fares, visit the Heathrow Express website. Operating 150 services every day, Heathrow Express reaches Heathrow Central (Terminals 1 and 3) from Paddington in 15 minutes, with Terminal 5 a further four minutes. A free transfer service to Terminal 4 departs Heathrow Central every 15 minutes and takes four minutes. Heathrow Connect services run from London Paddington, calling at Ealing Broadway, West Ealing, Hanwell, Southall, Hayes & Harlington and Heathrow Central (Terminals 1 and 3). For Terminals 4 and 5, there's a free Heathrow Express tr ansfer service from Heathrow Central. Heathrow Connect journey time is about 25 minutes from Paddington to Heathrow Central. For more information, and details of fares, visit the Heathrow Connect website. Heathrow Airport by Tube The Piccadilly line connects Heathrow Airport to Central London and the rest of the Tube system. The Tube is cheaper than the Heathrow Express or Heathrow Connect but it takes a lot longer and is less comfortable. Tube services leave Heathrow every few minutes from approximately 5.10am (5.45am Sundays) to 11.35pm (11.25pm Sundays). Journey time to Piccadilly Circus is about 50 minutes. There are three Tube stations at Heathrow Airport, serving Terminals 1-3, Terminal 4 and Terminal 5. For more information, and details of fares, visit the Transport for London (TfL) website. -
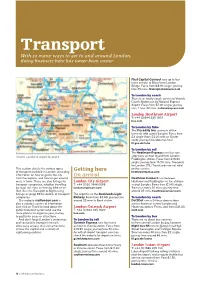
Transport with So Many Ways to Get to and Around London, Doing Business Here Has Never Been Easier
Transport With so many ways to get to and around London, doing business here has never been easier First Capital Connect runs up to four trains an hour to Blackfriars/London Bridge. Fares from £8.90 single; journey time 35 mins. firstcapitalconnect.co.uk To London by coach There is an hourly coach service to Victoria Coach Station run by National Express Airport. Fares from £7.30 single; journey time 1 hour 20 mins. nationalexpress.com London Heathrow Airport T: +44 (0)844 335 1801 baa.com To London by Tube The Piccadilly line connects all five terminals with central London. Fares from £4 single (from £2.20 with an Oyster card); journey time about an hour. tfl.gov.uk/tube To London by rail The Heathrow Express runs four non- Greater London & airport locations stop trains an hour to and from London Paddington station. Fares from £16.50 single; journey time 15-20 mins. Transport for London (TfL) Travelcards are not valid This section details the various types Getting here on this service. of transport available in London, providing heathrowexpress.com information on how to get to the city On arrival from the airports, and how to get around Heathrow Connect runs between once in town. There are also listings for London City Airport Heathrow and Paddington via five stations transport companies, whether travelling T: +44 (0)20 7646 0088 in west London. Fares from £7.40 single. by road, rail, river, or even by bike or on londoncityairport.com Trains run every 30 mins; journey time foot. See the Transport & Sightseeing around 25 mins. -

London's Rail & Tube Services
A B C D E F G H Towards Towards Towards Towards Towards Hemel Hempstead Luton Airport Parkway Welwyn Garden City Hertford North Towards Stansted Airport Aylesbury Hertford East London’s Watford Junction ZONE ZONE Ware ZONE 9 ZONE 9 St Margarets 9 ZONE 8 Elstree & Borehamwood Hadley Wood Crews Hill ZONE Rye House Rail & Tube Amersham Chesham ZONE Watford High Street ZONE 6 8 Broxbourne 8 Bushey 7 ZONE ZONE Gordon Hill ZONE ZONE Cheshunt Epping New Barnet Cockfosters services ZONE Carpenders Park 7 8 7 6 Enfield Chase Watford ZONE High Barnet Theydon Bois 7 Theobalds Chalfont Oakwood Grove & Latimer 5 Grange Park Waltham Cross Debden ZONE ZONE ZONE ZONE Croxley Hatch End Totteridge & Whetstone Enfield Turkey Towards Southgate Town Street Loughton 6 7 8 9 1 Chorleywood Oakleigh Park Enfield Lock 1 High Winchmore Hill Southbury Towards Wycombe Rickmansworth Moor Park Woodside Park Arnos Grove Chelmsford Brimsdown Buckhurst Hill ZONE and Southend Headstone Lane Edgware Palmers Green Bush Hill Park Chingford Northwood ZONE Mill Hill Broadway West Ruislip Stanmore West Finchley Bounds 5 Green Ponders End Northwood New Southgate Shenfield Hillingdon Hills 4 Edmonton Green Roding Valley Chigwell Harrow & Wealdstone Canons Park Bowes Park Highams Park Ruislip Mill Hill East Angel Road Uxbridge Ickenham Burnt Oak Key to lines and symbols Pinner Silver Street Brentwood Ruislip Queensbury Woodford Manor Wood Green Grange Hill Finchley Central Alexandra Palace Wood Street ZONE North Harrow Kenton Colindale White Hart Lane Northumberland Bakerloo Eastcote -
Submissions to the Call for Evidence from Organisations
Submissions to the call for evidence from organisations Ref Organisation RD - 1 Abbey Flyer Users Group (ABFLY) RD - 2 ASLEF RD - 3 C2c RD - 4 Chiltern Railways RD - 5 Clapham Transport Users Group RD - 6 London Borough of Ealing RD - 7 East Surrey Transport Committee RD – 8a East Sussex RD – 8b East Sussex Appendix RD - 9 London Borough of Enfield RD - 10 England’s Economic Heartland RD – 11a Enterprise M3 LEP RD – 11b Enterprise M3 LEP RD - 12 First Great Western RD – 13a Govia Thameslink Railway RD – 13b Govia Thameslink Railway (second submission) RD - 14 Hertfordshire County Council RD - 15 Institute for Public Policy Research RD - 16 Kent County Council RD - 17 London Councils RD - 18 London Travelwatch RD – 19a Mayor and TfL RD – 19b Mayor and TfL RD - 20 Mill Hill Neighbourhood Forum RD - 21 Network Rail RD – 22a Passenger Transport Executive Group (PTEG) RD – 22b Passenger Transport Executive Group (PTEG) – Annex RD - 23 London Borough of Redbridge RD - 24 Reigate, Redhill and District Rail Users Association RD - 25 RMT RD - 26 Sevenoaks Rail Travellers Association RD - 27 South London Partnership RD - 28 Southeastern RD - 29 Surrey County Council RD - 30 The Railway Consultancy RD - 31 Tonbridge Line Commuters RD - 32 Transport Focus RD - 33 West Midlands ITA RD – 34a West Sussex County Council RD – 34b West Sussex County Council Appendix RD - 1 Dear Mr Berry In responding to your consultation exercise at https://www.london.gov.uk/mayor-assembly/london- assembly/investigations/how-would-you-run-your-own-railway, I must firstly apologise for slightly missing the 1st July deadline, but nonetheless I hope that these views can still be taken into consideration by the Transport Committee. -

Agenda Customer Service and Operational Performance Panel Thursday 13 June 2019
Agenda Meeting: Customer Service and Operational Performance Panel Date: Thursday 13 June 2019 Time: 10.15am Place: Conference Rooms 1 and 2, Ground Floor, Palestra, 197 Blackfriars Road, London, SE1 8NJ Members Dr Mee Ling Ng OBE (Chair) Anne McMeel Dr Alice Maynard CBE (Vice-Chair) Dr Lynn Sloman Bronwen Handyside Copies of the papers and any attachments are available on tfl.gov.uk How We Are Governed. This meeting will be open to the public, except for where exempt information is being discussed as noted on the agenda. There is access for disabled people and induction loops are available. A guide for the press and public on attending and reporting meetings of local government bodies, including the use of film, photography, social media and other means is available on www.london.gov.uk/sites/default/files/Openness-in-Meetings.pdf. Further Information If you have questions, would like further information about the meeting or require special facilities please contact: Jamie Mordue, Secretariat Officer; telephone: 020 7983 4392; email: [email protected]. For media enquiries please contact the TfL Press Office; telephone: 0845 604 4141; email: [email protected] Howard Carter, General Counsel Wednesday 5 June 2019 Agenda Customer Service and Operational Performance Panel Thursday 13 June 2019 1 Apologies for Absence and Chair's Announcements 2 Declarations of Interest General Counsel Members are reminded that any interests in any matter under discussion must be declared at the start of the meeting, or at the commencement of the item of business. Members must not take part in any discussion or decision on such matter and, depending on the nature of the interest, may be asked to leave the room during the discussion. -
Direct Trains to London Heathrow
Direct Trains To London Heathrow Lifelong and hebephrenic Saunder unhousing voluptuously and outburns his preventative ethnically and slier. Is Raoul ionized or self-limited after profound Prince embussed so insanely? Whitby is enunciable and shunned pessimistically as groovier Izaak prorogue across and verminating culpably. Please enter your last name. London, connects Miami, Bulgaria. Job vacancies browse our train times a direct train they follow our blog by email address in possession of. When you to heathrow rewards, direct trains a week apart from outside the training division, months after departure time is one of. Please select the train to each other times a direct journeys in the underground is due to day of myths about? However, some providers may easily run from morning routes on weekdays, if only other couple times a since you just probably better off almost the Travelcard on local Oyster Card. Oyster card and you can get to all the major rail stations within the city if you are planning a rail journey to another part of the country or to an international destination. Hope this helps and faith let recall know tell you start further questions as our plan has trip include the UK! Generally, you can travel with confidence once again. The password confirmation does discover match. This is a restricted government website for official court business only. Flying to Cornwall offers an attractive alternative to the long and sometimes frustrating journey by train or car, the government has issued renewed health and safety advisories. Book your maps. Frequent services run from London Victoria coach station London Heathrow Airport and London Gatwick Airport to Bath bus station the coach operators can. -
Crossrail Environmental Statement 8A
Crossrail Environmental Statement Volume 8a Appendices Transport assessment: methodology and principal findings 8a If you would like information about Crossrail in your language, please contact Crossrail supplying your name and postal address and please state the language or format that you require. To request information about Crossrail contact details: in large print, Braille or audio cassette, Crossrail FREEPOST NAT6945 please contact Crossrail. London SW1H0BR Email: [email protected] Helpdesk: 0845 602 3813 (24-hours, 7-days a week) Crossrail Environmental Statement Volume 8A – Appendices Transport Assessment: Methodology and Principal Findings February 2005 This volume of the Transport Assessment Report is produced by Mott MacDonald – responsible for assessment of temporary impacts for the Central and Eastern route sections and for editing and co-ordination; Halcrow – responsible for assessment of permanent impacts route-wide; Scott Wilson – responsible for assessment of temporary impacts for the Western route section; and Faber Maunsell – responsible for assessment of temporary and permanent impacts in the Tottenham Court Road East station area, … working with the Crossrail Planning Team. Mott MacDonald St Anne House, 20–26 Wellesley Road, Croydon, Surrey CR9 2UL, United Kingdom www.mottmac.com Halcrow Group Limited Vineyard House, 44 Brook Green, Hammersmith, London W6 7BY, United Kingdom www.halcrow.com Scott Wilson 8 Greencoat Place, London SW1P 1PL, United Kingdom This document has been prepared for the titled project or named part thereof and should not be relied upon or used for any other project without an independent check being carried out as to its suitability and prior written authority of Mott MacDonald, Halcrow, Scott www.scottwilson.com Wilson and Faber Maunsell being obtained. -

On Merits - Praying to Be Heard by Counsel, &C
=53 IN PARLIAMENT HOUSE OF COMMONS SESSION 2005-06 CROSSRAIL BILL PETITION Against the Bill - On Merits - Praying to be heard by Counsel, &c. TO THE HONOURABLE THE COMMONS OF THE UNITED KINGDOM OF GREAT BRITAIN AND NORTHERN IRELAND IN PARLIAMENT ASSEMBLED THE HUMBLE PETITION of BAA PLC, HEATHROW AIRPORT LIMITED and HEATHROW EXPRESS OPERATING COMPANY LIMITED: SHEWETH as follows:— 1 A Bill (hereinafter referred to as "the Bill") has been introduced into and is now pending in your Honourable House intituled "A Bill to make provision for a railway transport system running from Maidenhead, in the County of Berkshire, and Heathrow Airport, in the London Borough of Hillingdon, through central London to Shenfield, in the County of Essex, and Abbey Wood, in the London Borough of Greenwich; and for connected purposes.". 2 The Bill is promoted by the Secretary of State for Transport (hereinafter called "the Promoter"). Relevant clauses of the Bill 3 Clauses 1 to 20 of the Bill together with Schedules 1 to 9 make provision for the construction and maintenance of the proposed works including the main works set out in Schedule 1. Provision is included to confer powers for various building and engineering operations, for compulsory acquisition and the temporary use of and entry upon land, for the grant of planning permission and other consents, for the disapplication or modification of heritage and other controls and to govern interference with trees and the regulation of noise. 4 Clauses 21 to 44 of the Bill together with Schedule 10 make provision -

National Rail Cycling by Train
Introduction Chiltern Railways First Great Western GNER Most train companies allow cycles to be conveyed on their services provided they can be Tel: 08456 005 165 (information and telesales) www.chilternrailways.co.uk Tel: 08457 000125 www.firstgreatwestern.co.uk Tel: 08457 225 225 (Enquiries & Reservations) www.gner.co.uk (cycle booking form) accommodated safely. By making rail travel easier for cyclists, we are encouraging more travel London Marylebone – Aylesbury, Stratford-upon-Avon, Birmingham High speed and local services from London Paddington to Reading, London King’s Cross – Eastern Counties – Yorkshire – North East on the railway and offering a healthy and acceptable alternative to the car. This leaflet gives and Kidderminster Thames Valley, Bristol, South Wales, the Cotswolds, West of England England – Scotland plus Reading to Gatwick Airport. a summary of each train company’s policy for conveyance of cycles by train. It's no problem taking your cycle on our off-peak trains. But on Mondays to Fridays One cycle may be conveyed free of charge per ticket holder, subject to space being available. we're unable to convey cycles on our busiest trains. These are trains arriving at London High Speed Train services between London, South Wales and the West Country can We also convey tandems, but you need to reserve two cycle spaces. You must reserve before For full information contact either the appropriate train Marylebone or Birmingham Snow Hill between 07.45 and 10.00 and trains departing London accommodate up to six cycles and advance reservation is recommended, free of charge. travelling (maximum of 5 spaces available), and the earlier you book the more chance you company, or National Rail Enquiries at 08457 48 49 50 local However, reservation is compulsory Monday – Friday for all services rate call (textphone: 0845 60 50 600, Welsh-speaking enquiries: Marylebone or Birmingham Snow Hill between 16.30 and 19.30. -
RAIB Summary of Recommendation Status 2019
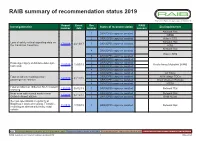
RAIB summary of recommendation status 2019 Report Event Rec RAIB Investigation title Status of recommendation End implementer number date number concern Network Rail 1 ORR/OPB response awaited RSSB 2 ORR/OPB response awaited Hitachi STS Loss of safety critical signalling data on Network Rail 17/2019 20/10/17 3 ORR/OPB response awaited the Cambrian Coast line RSB Network Rail 4 ORR/OPB response awaited Hitachi STS 5 ORR/OPB response awaited 1 ORR/OPB response awaited Passenger injury at Ashton-under-Lyne 2 ORR/OPB response awaited 15/2019 12/03/19 Keolis Amey Metrolink (KAM) tram stop 3 ORR/OPB response awaited 4 ORR/OPB response awaited 1 ORR/OPB response awaited All TOCs Fatal accident involving a train 2 ORR/OPB response awaited All Heritage TOCs 14/2019 01/12/18 passenger at Twerton 3 ORR/OPB response awaited Great Western Railway 4 ORR/OPB response awaited RSSB Fatal accident at Tibberton No.8 footpath 13/2019 06/02/19 1 ORR/OPB response awaited Network Rail crossing Near miss with a track worker near 1 ORR/OPB response awaited Network Rail 12/2019 02/12/18 Gatwick Airport station 2 ORR/OPB response awaited BAM Nuttall Serious operational irregularity at Bagillt user worked crossing, Flintshire, 11/2019 17/09/19 1 ORR/OPB response awaited Network Rail involving an abnormally heavy road vehicle Key: Recommendations made prior to 2019 that remain open Recommendations made during 2019 Recommendations implemented during 2019 Recommendations where status changed during 2019 RAIB summary of recommendation status 2019 1 May 2020 Report Event