Design of the Electronic Engine Control Unit Performance Test System of Aircraft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Engine Control Unit
Engine Control Unit João Filipe Ferreira Vicente Dissertation submitted for obtaining the degree in Master of Electronic Engineering, Instituto Superior Técnico Abstract The car used (Figure 1) has a fibreglass body and uses a Honda F4i engine taken from the Honda This paper describes the design of a fully CBR 600. programmable, low cost ECU based on a standard electronic circuit based on a dsPIC30f6012A for the Honda CBR600 F4i engine used in the Formula Student IST car. The ECU must make use of all the temperature, pressure, position and speed sensors as well as the original injectors and ignition coils that are already available on the F4i engine. The ECU must provide the user access to all the maps and allow their full customization simply by connecting it to a PC. This will provide the user with Figure 1 - FST03. the capability to adjust the engine’s performance to its needs quickly and easily. II. Electronic Fuel Injection Keywords The growing concern of fuel economy and lower emissions means that Electronic Fuel Injection Electronic Fuel Injection, Engine Control Unit, (EFI) systems can be seen on most of the cars Formula Student being sold today. I. Introduction EFI systems provide comfort and reliability to the driver by ensuring a perfect engine start under This project is part of the Formula Student project most conditions while lessening the impact on the being developed at Instituto Superior Técnico that environment by lowering exhaust gas emissions for the European series of the Formula Student and providing a perfect combustion of the air-fuel competition. -

05 NG Engine Technology.Pdf
Table of Contents NG Engine Technology Subject Page New Generation Engine Technology . .5 Turbocharging . .6 Turbocharging Terminology . .6 Basic Principles of Turbocharging . .7 Bi-turbocharging . .10 Air Ducting Overview . .12 Boost-pressure Control (Wastegate) . .14 Blow-off Control (Diverter Valves) . .15 Charge-air Cooling . .18 Direct Charge-air Cooling . .18 Indirect Charge Air Cooling . .18 Twin Scroll Turbocharger . .20 Function of the Twin Scroll Turbocharger . .22 Diverter valve . .22 Tuned Pulsed Exhaust Manifold . .23 Load Control . .24 Controlled Variables . .25 Service Information . .26 Limp-home Mode . .26 Direct Injection . .28 Direct Injection Principles . .29 Mixture Formation . .30 High Precision Injection . .32 HPI Function . .33 High Pressure Pump Function and Design . .35 Pressure Generation in High-pressure Pump . .36 Limp-home Mode . .37 Fuel System Safety . .38 Piezo Fuel Injectors . .39 Injector Design and Function . .40 Injection Strategy . .42 Initial Print Date: 09/06 Revision Date: 03/11 Subject Page Piezo Element . .43 Injector Adjustment . .43 Injector Control and Adaptation . .44 Injector Adaptation . .44 Optimization . .45 HDE Fuel Injection . .46 VALVETRONIC III . .47 Phasing . .47 Masking . .47 Combustion Chamber Geometry . .48 VALVETRONIC Servomotor . .50 Function . .50 Subject Page BLANK PAGE NG Engine Technology Model: All from 2007 Production: All After completion of this module you will be able to: • Understand the technology used on BMW turbo engines • Understand basic turbocharging principles • Describe the benefits of twin Scroll Turbochargers • Understand the basics of second generation of direct injection (HPI) • Describe the benefits of HDE solenoid type direct injection • Understand the main differences between VALVETRONIC II and VALVETRONIC II I 4 NG Engine Technology New Generation Engine Technology In 2005, the first of the new generation 6-cylinder engines was introduced as the N52. -

SURVEY on MULTI POINT FUEL INJECTION (MPFI) ENGINE Deepali Baban Allolkar*1, Arun Tigadi 2 & Vijay Rayar3 *1 Department of Electronics and Communication, KLE Dr
ISSN: 2277-9655 [Allolkar* et al., 7(5): May, 2018] Impact Factor: 5.164 IC™ Value: 3.00 CODEN: IJESS7 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY SURVEY ON MULTI POINT FUEL INJECTION (MPFI) ENGINE Deepali Baban Allolkar*1, Arun Tigadi 2 & Vijay Rayar3 *1 Department of Electronics and Communication, KLE Dr. M S Sheshgiri College of Engineering and Technology, India. 2,3Assistant Professor, Department of Electronics and Communication, KLE Dr. M S Sheshgiri College of Engineering and Technology, India. DOI: 10.5281/zenodo.1241426 ABSTRACT The Multi Point Fuel Injection (MPFI) is a system or method of injecting fuel into internal combustion engine through multi ports situated on intake valve of each cylinder. It delivers an exact quantity of fuel in each cylinder at the right time. The amount of air intake is decided by the car driver by pressing the gas pedal, depending on the speed requirement. The air mass flow sensor near throttle valve and the oxygen sensor in the exhaust sends signal to Electronic control unit (ECU). ECU determines the air fuel ratio required, hence the pulse width. Depending on the signal from ECU the injectors inject fuel right into the intake valve. Thus the multi-point fuel injection technology uses individual fuel injector for each cylinder, there is no gas wastage over time. It reduces the fuel consumption and makes the vehicle more efficient and economical. KEYWORDS: Multi point fuel injection (MPFI), Cylinder, Gas pedal, Throttle valve, Electronic control Unit (ECU). I. INTRODUCTION Petrol engines used carburetor for supplying the air fuel mixture in correct ratio but fuel injection replaced carburetors from the 1980s onward. -

Closed Loop Engine Management System
Information Sheet #105 CLOSED-LOOP CONTROL SYSTEMS ON GASEOUS GENERATORS Frequently the engine used to drive the generator in a standby or prime power generator system is a 4-stroke spark ignition (SI) engine. While many smaller portable generators use SI engines fueled by gasoline, the majority of SI engine driven generators above 10kW are fitted with SI engines fueled by gaseous fuel, either natural gas (NG), or liquid petroleum gas (LPG). The majority of gaseous powered SI engines within a generator system are frequently referred to as having a Closed-Loop Engine Control System. In understanding Buckeye Power Sales necessary maintenance required to maintain optimum operation and performance of an SI engine using a closed-loop system, it is Reliable Power Professionals Since 1947 important to be aware of all the components within the system, their functions, and the advantages a closed-loop system. 1.0 WHAT IS A CLOSED-LOOP SYSTEM: The term “loop” in a control system refers to the path taken through various components to obtain a desired output. Used in conjunction with the word “closed” it refers to sensors measuring actual output along the path against required output. The various outputs measured along the path, or loop, are referred to as feedback signals. In a closed- loop system, the feedback along the path constantly enables the engine control system to adjust and ensure the right output is maintained as variations in ambient temperature, load, altitude, and humidity influence combustion and required output. So, in brief, closed-loop systems employ sensors in the loop to constantly provide feedback so the ECU can adjust inputs to obtain the required output. -

Design of Electronically Controlled Fuel Injection System for Carburetor Based Engine
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308 DESIGN OF ELECTRONICALLY CONTROLLED FUEL INJECTION SYSTEM FOR CARBURETOR BASED ENGINE 1 2 3 4 Abhishek Kumar , Abhijeet Kumar , Ujjwal Ashish , Ashok B 1B.Tech (EEE), 3rd year, VIT University, Vellore, India 2B.Tech (ECE), 3rd year, VIT University, Vellore, India 3B.Tech (EEE), 3rd year, VIT University, Vellore, India 4Assistant Professor, SMBS, VIT University, Vellore, India Abstract In the Modern world, automotive electronics play an important role in the manufacturing of any passenger car. Automotive electronics consists of advanced sensors, control units, and “mechatronic“actuator making it increasingly complex, networked vehicle systems. Electronic fuel injection (EFI) is the most common example of automotive electronics application in Powertrain. An EFI system is basically developed for the control of injection timing and fuel quantity for better fuel efficiency and power output. In this paper, we will explain various types of fuel injection system that are used most commonly nowadays and will also explain the various parameters considered during calculating,(using speed density method), base fuel quantity during runtime. We will explain the major difference between speed density method and alpha-n method and in the end, we will also show the MATLAB/Simulink model of fuel injection system for Single cylinder four stroke engine. Keywords: Air Fuel Ratio, Fuel Injection System, Speed Density Method, Engine Management System --------------------------------------------------------------------***---------------------------------------------------------------------- 1. INTRODUCTION The primary difference between carburetors and fuel Engine management system (EMS) is an essential part of injection system is that fuel injection atomizes through a any vehicle, which controls and monitors the engine. -

Engine Control Unit MS 12 Engine Control Unit MS 12
Bosch Motorsport | Engine Control Unit MS 12 Engine Control Unit MS 12 www.bosch-motorsport.com u 12 injection output stages u For piezo injectors u 78 data inputs The MS 12 is the high-end ECU for Diesel engines. This Optional function packages available ECU offers 12 Piezo injection power stages for use in up to a 12 cylinder engine. Various engine and chassis Interface to Bosch Data Logging System parameters can be measured with a high number of in- Max. vibration Vibration profile 1 (see Appendix put channels. All measured data can be transferred via or www.bosch-motorsport.com) FireWire interface to an optional flash card data log- ger. Gear box control strategies are optional. Technical Specifications Application Mechanical Data Engine layout Max. 12 cyl. Aluminum housing Injector type Piezo injectors 5 connectors in motorsport technology with high pin density, 242 pins Control strategy Quantity based Each connector individually filtered. Injection timing 2 pilot injections Vibration damped circuit boards 1 main injection 1 post injection 8 housing fixation points Turbo boost control (incl. VTG) Single or Twin-Turbo Size 240 x 200 x 57 mm Lambda measurement Protection Classification IP67 to DIN 40050, Section 9, Is- sue 2008 Traction control Weight 2,500 g Launch control Temperature range -20 to 85°C Gear cut for sequential gearbox Gearbox control Speed limiter 2 | Engine Control Unit MS 12 Electrical Data AS 6-18-35 SB Power consumption w/o inj. Approx. 5 W at 14 V Mating Connector III F 02U 000 475-01 AS 6-18-35 SC Power consumption at 6,500 rpm Max. -

Modeling and Control of Actuators and Co-Surge in Turbocharged Engines
Linköping Studies in Science and Technology Dissertations, No. 1590 Modeling and control of actuators and co-surge in turbocharged engines Andreas Thomasson Department of Electrical Engineering Linköping University SE–581 83 Linköping, Sweden Linköping 2014 Linköping studies in science and technology. Dissertations, No. 1590 Modeling and control of actuators and co-surge in turbocharged engines Andreas Thomasson ISBN 978-91-7519-355-7 ISSN 0345-7524 © 2014 Andreas Thomasson, unless otherwise noted. All rights reserved. Andreas Thomasson [email protected] www.vehicular.isy.liu.se Division of Vehicular Systems Department of Electrical Engineering Linköping University SE–581 83 Linköping Sweden Paper 1 is reproduced here with permission from IFP Energies nouvelles Paper 2 is reproduced here with permission from IFAC Paper 3 is reproduced here with permission from Elsevier Paper 4 is reproduced here with permission from IFAC The cover: Photo of an electronic throttle, a pneumatic actuator, and a measurement of mass flows during co-surge, illustrating the main topics of the thesis. Typeset with LATEX 2ε Printed by LiU-Tryck, Linköping, Sweden 2014 i Abstract The torque response of the engine is important for the driving experience of a vehicle. In spark ignited engines, torque is proportional to the air flow into the cylinders. Controlling torque therefore implies controlling air flow. In modern turbocharged engines, the driver commands are interpreted by an electronic control unit that controls the engine through electromechanical and pneumatic actuators. Air flow to the intake manifold is controlled by an electronic throttle, and a wastegate controls the energy to the turbine, affecting boost pressure and air flow. -

Transient Air Dynamics Modeling for an Advanced Alternative Fueled Engine
Transient Air Dynamics Modeling for an Advanced Alternative Fueled Engine Undergraduate Honors Thesis Presented in Partial Fulfillment of the Requirements for Graduation with Distinction at The Ohio State University By Ryan V. Everett * * * * * The Ohio State University 2010 Defense Committee: Professor Giorgio Rizzoni, Advisor Dr. Shawn Midlam-Mohler Copyrighted by Ryan V. Everett 2010 ii ABSTRACT The EcoCAR challenge is a three year competition with a goal of re-engineering a 2009 General Motors crossover utility vehicle to improve vehicle emissions and fuel economy, while maintaining drivability and consumer acceptability. Ohio State’s team has selected a plug-in hybrid electric vehicle (PHEV) architecture with a 1.8 L CNG Honda engine as the auxiliary power unit. The Honda engine is converted to run on E85 fuel, which requires the engine control software to be rewritten. The purpose of this research is to write a feed forward air/fuel ratio (AFR) control algorithm to better manage fuel injection during transient engine events. AFR control has a major impact on engine fuel economy and tail pipe emissions. This research investigates the accuracy of using a dynamic intake manifold filling and emptying model coupled with a linear approximation of the Taylor Series expansion to predict air flow forward in time. To better estimate air flowing passed the throttle plate and into the intake manifold, a quasi-static effective area map of the throttle was created. The control algorithm uses the throttle effective area map to improve the accuracy of air flow estimation into the intake manifold because the MAF sensor is not a reliable flow meter during transient engine events. -
Or Fault Code Entry "Plausibility of Camshaft Position"
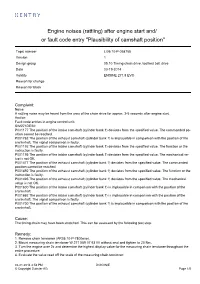
Engine noises (rattling) after engine start and/ or fault code entry "Plausibility of camshaft position" Topic number LI05.10-P-058758 Version 1 Design group 05.10 Timing chain drive, toothed belt drive Date 03-19-2014 Validity ENGINE 271.8 EVO Reason for change Reason for block Complaint: Noise: A rattling noise may be heard from the area of the chain drive for approx. 2-5 seconds after engine start. And/or: Fault code entries in engine control unit: SIM271DE20: P001177 The position of the intake camshaft (cylinder bank 1) deviates from the specified value. The commanded po- sition cannot be reached. P001762 The position of the exhaust camshaft (cylinder bank 1) is implausible in comparison with the position of the crankshaft. The signal comparison is faulty. P001192 The position of the intake camshaft (cylinder bank 1) deviates from the specified value. The function or the instruction is faulty. P001195 The position of the intake camshaft (cylinder bank 1) deviates from the specified value. The mechanical se- tup is not OK. P001477 The position of the exhaust camshaft (cylinder bank 1) deviates from the specified value. The commanded position cannot be reached. P001492 The position of the exhaust camshaft (cylinder bank 1) deviates from the specified value. The function or the instruction is faulty. P001495 The position of the exhaust camshaft (cylinder bank 1) deviates from the specified value. The mechanical setup is not OK. P001600 The position of the intake camshaft (cylinder bank 1) is implausible in comparison with the position of the crankshaft. P001662 The position of the intake camshaft (cylinder bank 1) is implausible in comparison with the position of the crankshaft. -

Selective Interrupt and Control: an Open ECU Alternative,” SAE T Echnical Paper 2018-01-0127, 2018, Doi:10.4271/2018-01-0127
2018-01-0127 Published 03 Apr 2018 Selective Interrupt and Control: An Open INTERNATIONAL. ECU Alternative Logan Smith, Ian Smith, and Scott Hotz Southwest Research Institute Mark Stuhldreher EPA Ofce of Mobile Sources Citation: Smith, L., Smith, I., Hotz, S., and Stuhldreher, M., “Selective Interrupt and Control: An Open ECU Alternative,” SAE T echnical Paper 2018-01-0127, 2018, doi:10.4271/2018-01-0127. Abstract without the need for an open ECU duplicating the o enable the evaluation of of-calibration powertrain stock calibration. operation, a selective interrupt and control (SIC) test Results are presented demonstrating the impact of Tcapability was developed as part of an EPA evaluation ignition timing and cam phasing on engine efciency. When of a 1.6 L EcoBoost® engine. A control and data acquisition coupled with combustion analysis and crank-domain data device sits between the stock powertrain controller and the acquisition, this test confguration provides a complete picture engine; the device selectively passes through or modifes of powertrain performance. Future applications of SIC could control signals while also simulating feedback signals. Tis enable evaluating the impact of cam phasing on trapped paper describes the development process of SIC that enabled residuals, examining knock tolerance, or studying the impact a test engineer to command of-calibration setpoints for of splitting direct fuel injection into multiple pulses - all on a intake and exhaust cam phasing as well as ignition timing stock powertrain platform. Introduction Tis paper will frst present the technical background of he light-duty greenhouse gas regulation for model years tethered benchmarking, RPECS, and SIC. -

Air Filter and Selected Vehicle Characteristics
sustainability Article Air Filter and Selected Vehicle Characteristics František Synák *, Alica Kalašová and Ján Synák Department of Road and Urban Transport, University of Žilina, 01026 Žilina, Slovakia; [email protected] (A.K.); [email protected] (J.S.) * Correspondence: [email protected]; Tel.: +42-1907-230-469 Received: 12 September 2020; Accepted: 6 November 2020; Published: 10 November 2020 Abstract: While a vehicle is driving, the air filter is gradually being clogged. Thus, there is a condition for air mass delivered into the engine’s cylinders to be reduced. It can further degrade the vehicle’s ability to accelerate and, therefore, have an impact on road driving safety, or it can eventually make a vehicle performance worse or cause a change in the exhaust gas composition. The article pays attention to the impact of clogged air filter on selected vehicle characteristics including a vehicle’s dynamic features, fuel consumption and composition of the exhaust gases. The measurements have been performed under laboratory conditions. For higher result objectivity, the measurements have been done under some extreme conditions as well, with both the air filter fully clogged and forced air induction. The importance of the article lies in quantification of the impact of clogged air filter on selected vehicle features. The results from this article show a relatively low impact of air filter on the features studied. The biggest differences were measured under extreme conditions when the air filter had been almost fully clogged, or the air had been delivered into the engine under pressure. Keywords: air filter; air pollution; combustion engine; emissions; exhaust gases; fuel consumption; torque power 1. -
TEMPORARY REVISION EM-TR-MDC-E1-195 Engine
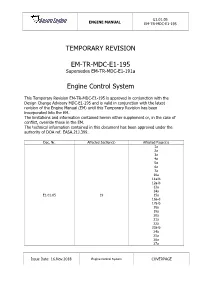
E1.01.05 ENGINE MANUAL EM-TR-MDC-E1-195 TEMPORARY REVISION EM-TR-MDC-E1-195 Supersedes EM-TR-MDC-E1-191a Engine Control System This Temporary Revision EM-TR-MDC-E1-195 is approved in conjunction with the Design Change Advisory MDC-E1-195 and is valid in conjunction with the latest revision of the Engine Manual (EM) until this Temporary Revision has been incorporated into the EM. The limitations and information contained herein either supplement or, in the case of conflict, override those in the EM. The technical information contained in this document has been approved under the authority of DOA ref. EASA.21J.399. Doc. Nr. Affected Section(s) Affected Page(s)s 1a 2a 3a 4a 5a 6a 7a 10a 11a-b 12a-b 13a 14a E1.01.05 19 15a 16a-d 17a-b 18a 19a 20a 21a 22a 23a-b 24a 25a 26a 27a Issue Date: 16.Nov.2018 Engine Control System COVERPAGE E1.01.05 ENGINE MANUAL EM-TR-MDC-E1-195 Instruction: - Print this document on yellow paper (single-sided) - Insert this cover page as the first page of the EM - Insert the other pages of this Temporary Revision adjacent to or in front of the corresponding EM pages Issue Date: 16.Nov.2018 Engine Control System COVERPAGE E1.01.05 ENGINE MANUAL EM-TR-MDC-E1-195 19. Electrical System This page is amended to read: A reliable electrical supply broadly similar to DO160C section 16 Cat B to the ECU must be granted at all time. If an ECU power supply according DO160C section 16 Cat Z is required, two independent supply paths and buses are demanded.