Basic Surveying – Theory and Practice 4 Hours
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

UNIVERSITY of CALIFORNIA Los Angeles the Hubble
UNIVERSITY OF CALIFORNIA Los Angeles The Hubble Constant and the ΛCDM Cosmology: A Magnified View using Strong Lensing A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Astronomy and Astrophysics by Anowar Jaman Shajib 2020 © Copyright by Anowar Jaman Shajib 2020 ABSTRACT OF THE DISSERTATION The Hubble Constant and the ΛCDM Cosmology: A Magnified View using Strong Lensing by Anowar Jaman Shajib Doctor of Philosophy in Astronomy and Astrophysics University of California, Los Angeles, 2020 Professor Tommaso Treu, Chair Recently, a significant tension has been reported between two measurements of the Hubble constant (H0) from early-Universe (e.g., cosmic microwave background) and late-Universe probes (e.g., cosmic distance ladder). If systematic errors are ruled out in these measure- ments, then new physics extending the ΛCDM model will be required to resolve the tension. Therefore, different independent probes of H0 { such as the strong-lensing time-delay { are essential to confirm or resolve the tension. The measured time-delays between the lensed images of a background quasar constrain H0, as they depend on the absolute physical dis- tances in the lens configuration. I led a team from the STRong-lensing Insights into the Dark Energy Survey (STRIDES) collaboration to analyze the lens DES J0408-5354. I modeled the mass distribution of this lens using Hubble Space Telescope imaging, and combined it +2:7 −1 −1 with analyses from my collaborators to infer H0 = 74:2−3:0 km s Mpc with the highest precision (3.9 per cent) from a single lens to date. -

DAFTAR PUSTAKA Arida, Wiratsi. 2015
DAFTAR PUSTAKA Arida, Wiratsi. 2015. “Alih Kode dan Campur Kode Dalam Lirik Lagu First Love, Can You Keep A Secret, Final Distance Oleh Utada Hikaru”. Padang: Skripsi Sarjana Sastra Jepang Universitas Andalas Aslina dan Leni Syafhya. 2007. Pengantar Sosiolinguistik. Bandung: PT Refika Aditama Chaer, Abdul dan Leonie Agustina. 2004. Sosiolinguistik. Jakarta: Rineka Cipta Dhamasyraya, Priyade. 2012. “Alih Kode dan Campur Kode Dalam Lirik Lagu Rebel:Sick, Shadow:Six Antar Bahasa Jepang Dengan Bahasa Inggris”. Padang: Skripsi Sarjana Sastra Jepang Universitas Andalas Kesuma. Tri Mastoyo Jari. 2007. Pengantar (Metode) Penelitian Bahasa. Yogyakarta: Carasvatibooks Kridalaksana, Harimurti. 2008. Kamus Linguistik. Jakarta: PT Gramedia Pustaka Utama Mahsun. 2005. Metode Penelitian Bahasa. Jakarta: PT Raja Grafindo Persada Nababan, P.W.J. 1984. Sosiolinguistik: Suatu Pengantar. Jakarta: PT. Gramedia Pustaka Utama Nur, Afief Rahman. 2015. “Alih Kode Dalam Film Jepang Beck”. Padang: Skripsi Sarjana Sastra Jepang Universitas Andalas Oktavianus, 2006. Analisis Wacana Lintas Bahasa. Padang: Andalas University Press Padmadewi, Ni Nyoman dkk. 2014. Sosiolinguistik. Singaraja:Graha Ilmu 53 Rusyana, Yus. 1975. Interferensi Morfologi Pada Penggunaan Bahasa Indonesia oleh Anak-Anak yang Berbahasa Pertama Bahasa Sunda Murid Sekolah Dasar Provinsi Jawa Barat. Disertasi. Jakarta: Universitas Indonesia Sudaryanto. 1993. Metode dan Aneka Teknik Analisis Bahasa. Yogyakarta: Duta Wacana University Press Undang Undang Dasar. Undang Undang Dasar No 8 Tahun 1992, [pdf], (http://www.hukumonline.com/pusatdata/detail/859/node/667/uu-no-8-tahun- 1992-perfilman, diakses padang 5 Januari 2016) Verhaar, J.W.M. 2010. Asas-Asas Linguistik Umum. Yogyakarta. Gajah Mada University Press 54. -

Fēnix® 6 Series Owner's Manual
FĒNIX® 6 SERIES Owner’s Manual © 2019 Garmin Ltd. or its subsidiaries All rights reserved. Under the copyright laws, this manual may not be copied, in whole or in part, without the written consent of Garmin. Garmin reserves the right to change or improve its products and to make changes in the content of this manual without obligation to notify any person or organization of such changes or improvements. Go to www.garmin.com for current updates and supplemental information concerning the use of this product. Garmin®, the Garmin logo, ANT+®, Approach®, Auto Lap®, Auto Pause®, Edge®, fēnix®, inReach®, QuickFit®, TracBack®, VIRB®, Virtual Partner®, and Xero® are trademarks of Garmin Ltd. or its subsidiaries, registered in the USA and other countries. Body Battery™, Connect IQ™, Garmin Connect™, Garmin Explore™, Garmin Express™, Garmin Golf™, Garmin Move IQ™, Garmin Pay™, HRM-Run™, HRM-Tri™, tempe™, TruSwing™, TrueUp™, Varia™, Varia Vision™, and Vector™ are trademarks of Garmin Ltd. or its subsidiaries. These trademarks may not be used without the express permission of Garmin. Android™ is a trademark of Google Inc. Apple®, iPhone®, iTunes®, and Mac® are trademarks of Apple Inc., registered in the U.S. and other countries. The BLUETOOTH® word mark and logos are owned by the Bluetooth SIG, Inc. and any use of such marks by Garmin is under license. The Cooper Institute®, as well as any related trademarks, are the property of The Cooper Institute. Di2™ is a trademark of Shimano, Inc. Shimano® is a registered trademark of Shimano, Inc. The Spotify® software is subject to third-party licenses found here: https://developer.spotify.com/legal/third- party-licenses. -
Marine Charts and Navigation
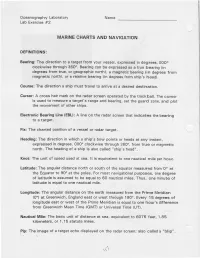
OceanographyLaboratory Name Lab Exercise#2 MARINECHARTS AND NAVIGATION DEFINITIONS: Bearing:The directionto a target from your vessel, expressedin degrees, 0OO" clockwise through 360". Bearingcan be expressedas a true bearing (in degreesfrom true, or geographicnorth), a magneticbearing (in degreesfrom magnetic north),or a relativebearing (in degreesfrom ship's head). Gourse:The directiona ship must travel to arrive at a desireddestination. Cursor:A cross hairmark on the radarscreen operated by the trackball.The cursor is used to measurea target'srange and bearing,set the guard zone,and plot the movementof other ships. ElectronicBearing Line (EBLI: A line on the radar screenthat indicates the bearing to a target. Fix: The charted positionof a vesselor radartarget. Heading:The directionin which a ship's bow pointsor headsat any instant, expressedin degrees,O0Oo clockwise through 360o,from true or magnetic north. The headingof a ship is alsocalled "ship's head". Knot: The unit of speedused at sea. lt is equivalentto one nauticalmile perhour. Latitude:The angulardistance north or south of the equatormeasured from O" at the Equatorto 9Ooat the poles.For most navigationalpurposes, one degree of latitudeis assumedto be equalto 60 nauticalmiles. Thus, one minute of latitude is equalto one nauticalmile. Longitude:The'angular distance on the earth measuredfrom the Prime Meridian (O') at Greenwich,England east or west through 180'. Every 15 degreesof longitudeeast or west of the PrimeMeridian is equalto one hour's difference from GreenwichMean Time (GMT)or Universal (UT). Time NauticalMile: The basic unit of distanceat sea, equivalentto 6076 feet, 1.85 kilometers,or 1.15 statutemiles. Pip:The imageof a targetecho displayedon the radarscreen; also calleda "blip". -

Angles, Azimuths and Bearings
Surveying & Measurement Angles, Azimuths and Bearings Introduction • Finding the locations of points and orientations of lines depends on measurements of angles and directions. • In surveying, directions are given by azimuths and bearings. • Angels measured in surveying are classified as . Horizontal angels . Vertical angles Introduction • Total station instruments are used to measure angels in the field. • Three basic requirements determining an angle: . Reference or starting line, . Direction of turning, and . Angular distance (value of the angel) Units of Angel Measurement In the United States and many other countries: . The sexagesimal system: degrees, minutes, and seconds with the last unit further divided decimally. (The circumference of circles is divided into 360 parts of degrees; each degree is further divided into minutes and seconds) • In Europe . Centesimal system: The circumference of circles is divided into 400 parts called gon (previously called grads) Units of Angel Measurement • Digital computers . Radians in computations: There are 2π radians in a circle (1 radian = 57.30°) • Mil - The circumference of a circle is divided into 6400 parts (used in military science) Kinds of Horizontal Angles • The most commonly measured horizontal angles in surveying: . Interior angles, . Angles to the right, and . Deflection angles • Because they differ considerably, the kind used must be clearly identified in field notes. Interior Angles • It is measured on the inside of a closed polygon (traverse) or open as for a highway. • Polygon: closed traverse used for boundary survey. • A check can be made because the sum of all angles in any polygon must equal • (n-2)180° where n is the number of angles. -

Instinct® Owner's Manual
INSTINCT® Owner’s Manual © 2018 Garmin Ltd. or its subsidiaries All rights reserved. Under the copyright laws, this manual may not be copied, in whole or in part, without the written consent of Garmin. Garmin reserves the right to change or improve its products and to make changes in the content of this manual without obligation to notify any person or organization of such changes or improvements. Go to www.garmin.com for current updates and supplemental information concerning the use of this product. Garmin®, the Garmin logo, and ANT+®, Auto Lap®, Auto Pause®, Edge®, inReach®, Instinct®, QuickFit®, TracBack®, VIRB®, Virtual Partner®, and Xero® are trademarks of Garmin Ltd. or its subsidiaries, registered in the USA and other countries. Garmin Connect™, Garmin Explore™, Garmin Express™, Garmin Move IQ™, tempe™, and TrueUp™ are trademarks of Garmin Ltd. or its subsidiaries. These trademarks may not be used without the express permission of Garmin. American Heart Association® is a registered trademark of American Heart Association, Inc. Android™ is a trademark of Google Inc. Apple® and Mac® are trademarks of Apple Inc., registered in the U.S. and other countries. The Bluetooth® word mark and logos are owned by the Bluetooth SIG, Inc. and any use of such marks by Garmin is under license. Advanced heartbeat analytics by Firstbeat. Windows® is a registered trademark of Microsoft Corporation in the United States and other countries. Other trademarks and trade names are those of their respective owners. This product is ANT+® certified. Visit www.thisisant.com/directory for a list of compatible products and apps. M/N: A03603 Table of Contents Restoring a Personal Record................................................ -

A Photomechanics Study of Wave Propagation John Barclay Ligon Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1971 A photomechanics study of wave propagation John Barclay Ligon Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Applied Mechanics Commons Recommended Citation Ligon, John Barclay, "A photomechanics study of wave propagation " (1971). Retrospective Theses and Dissertations. 4556. https://lib.dr.iastate.edu/rtd/4556 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. 72-12,567 LIGON, John Barclay, 1940- A PHOTOMECHANICS STUDY OF WAVE PROPAGATION. Iowa State University, Ph.D., 1971 Engineering Mechanics University Microfilms. A XEROX Company, Ann Arbor. Michigan THIS DISSERTATION HAS BEEN MICROFILMED EXACTLY AS RECEIVED A photomechanics study of wave propagation John Barclay Ligon A Dissertation Submitted to the Graduate Faculty in Partial Fulfillment of The Requirements for the Degree of DOCTOR OF PHILOSOPHY Major Subject; Engineering Mechanics Approved Signature was redacted for privacy. Signature was redacted for privacy. Signature was redacted for privacy. For the Graduate College Iowa State University Ames, Iowa 1971 PLEASE NOTE; Some pages have indistinct print. -

Connecting Time and Timbre Computational Methods for Generative Rhythmic Loops Insymbolic and Signal Domainspdfauthor
Connecting Time and Timbre: Computational Methods for Generative Rhythmic Loops in Symbolic and Signal Domains Cárthach Ó Nuanáin TESI DOCTORAL UPF / 2017 Thesis Director: Dr. Sergi Jordà Music Technology Group Dept. of Information and Communication Technologies Universitat Pompeu Fabra, Barcelona, Spain Dissertation submitted to the Department of Information and Communication Tech- nologies of Universitat Pompeu Fabra in partial fulfillment of the requirements for the degree of DOCTOR PER LA UNIVERSITAT POMPEU FABRA Copyright c 2017 by Cárthach Ó Nuanáin Licensed under Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 Music Technology Group (http://mtg.upf.edu), Department of Information and Communication Tech- nologies (http://www.upf.edu/dtic), Universitat Pompeu Fabra (http://www.upf.edu), Barcelona, Spain. III Do mo mháthair, Marian. V This thesis was conducted carried out at the Music Technology Group (MTG) of Universitat Pompeu Fabra in Barcelona, Spain, from Oct. 2013 to Nov. 2017. It was supervised by Dr. Sergi Jordà and Mr. Perfecto Herrera. Work in several parts of this thesis was carried out in collaboration with the GiantSteps team at the Music Technology Group in UPF as well as other members of the project consortium. Our work has been gratefully supported by the Department of Information and Com- munication Technologies (DTIC) PhD fellowship (2013-17), Universitat Pompeu Fabra, and the European Research Council under the European Union’s Seventh Framework Program, as part of the GiantSteps project ((FP7-ICT-2013-10 Grant agreement no. 610591). Acknowledgments First and foremost I wish to thank my advisors and mentors Sergi Jordà and Perfecto Herrera. Thanks to Sergi for meeting me in Belfast many moons ago and bringing me to Barcelona. -

Using the Suunto Hand Bearing Compass
R Application Note Using the Suunto Hand Bearing Compass Overview The Suunto bearing compass is used to measure an object’s bearing angle relative to magnetic North. The compass has a second scale for reading bearing angle from South. It is designed for viewing an object and its bearing angle simultaneously. This application note outlines the basic steps for using the Suunto bearing compass. Taking a Bearing 1. Site distant object. Use one eye to view distant object and the other to Figure 1: A Suunto Bearing Compass look into compass. With both eyes open, visually align vertical marker inside compass to distant object. Figure 2: Sighting an object Figure 3: Aligning compass sight and distant object 2. Take a reading. Every ten-degree marker is labeled with two numbers. The bottom number indicates degrees from magnetic North in a clockwise direction. The top number indicates degrees from magnetic South in a clockwise direction. Figure 4: Composite view through compass sight. The building edge is 275° from magnetic North. 3. Account for difference between true North and magnetic North. The compass points to magnetic North. The orientation of an object is measured in degrees East from North. The orientation of an object in San Francisco (and in the Bay Area) to true North is the compass reading from magnetic north plus 15°. The building edge in Figure 4 is 275° from Magnetic North. Therefore, the building edge in Figure 4 is 290° (275° + 15°) from true North. Visit one of the websites below for the magnetic declination for other locations. -

Black on Monmonier, 'Rhumb Lines and Map Wars: a Social History of the Mercator Projection'
H-HistGeog Black on Monmonier, 'Rhumb Lines and Map Wars: A Social History of the Mercator Projection' Review published on Friday, October 1, 2004 Mark Monmonier. Rhumb Lines and Map Wars: A Social History of the Mercator Projection. Chicago: University of Chicago Press, 2004. xiv + 242 pp. $25.00 (cloth), ISBN 978-0-226-53431-2. Reviewed by Jeremy Black (Department of History, Exeter University)Published on H-HistGeog (October, 2004) Monmonier, Distinguished Professor of Geography at Syracuse University, offers yet another first- rate contribution to the literature on cartography. His focus is one of the most famous projections, that of Gerard Mercator. As Monmonier points out, the popularity of this projection reflected its value for sailors, not least the map's value for plotting an easily followed course that could be marked off with a straight-edge and readily converted to a bearing. Mercator sought to reconcile the navigator's need for a straightforward course with the trade-offs inherent in flattening a globe. Mercator's projection affords negligible distortion on large-scale detailed maps of small areas, but relative size is markedly misrepresented on Mercator charts because of the increased poleward separation of parallels required to straighten out loxodromes. Monmonier shows how the projection was subsequently employed. It became the cartographic expression of what he terms a hot idea in the late 1590s, when Jodocus Hondius and Edward Wright offered their own versions of Mercator's world. Hondius relied heavily on Wright, who developed a mathematical description as well as tables showing how to position the parallels. Monmonier then takes the story forward showing how different demands, for example for artillery aiming, influenced the use of projections. -

An Agent- and GIS-Based Virtual City Creator: a Case Study of Beijing, China
T J T L U http://jtlu.org V. 11 N. 1 [2018] pp. 1231–1256 An agent- and GIS-based virtual city creator: A case study of Beijing, China Chengxiang Zhuge Chunfu Shao University of Cambridge Beijing Jiaotong University [email protected] [email protected] Shuling Wang Ying Hu Beijing Transport Institute Beijing Transport Institute [email protected] [email protected] Abstract: Many agent-based integrated urban models have been de- Article history: veloped to investigate urban issues, considering the dynamics and feed- Received: July 29, 2017 backs in complex urban systems. The lack of disaggregate data, however, Received in revised form: has become one of the main barriers to the application of these models, March 4, 2018 though a number of data synthesis methods have been applied. To gen- Accepted: July 16, 2018 erate a complete dataset that contains full disaggregate input data for Available online: December 5, model initialization, this paper develops a virtual city creator as a key 2018 component of an agent-based land-use and transport model, SelfSim. The creator is a set of disaggregate data synthesis methods, including a genetic algorithm (GA)-based population synthesizer, a transport facil- ity synthesizer, an activity facility synthesizer and a daily plan genera- tor, which use the household travel survey data as the main input. Fi- nally, the capital of China, Beijing, was used as a case study. The creator was applied to generate an agent- and Geographic Information System (GIS)-based virtual Beijing containing individuals, households, trans- port and activity facilities, as well as their attributes and linkages. -

104 Word Vocabulary List Geometry/Honors Geometry
104 Word Vocabulary List Geometry/Honors Geometry Summer Preparedness Project (“Math Summer Reading”) Summer 2021 – know and be prepared to define/discuss the following terms 1. Geometry - branch of mathematics that deals with points, lines, planes and solids and examines their properties. 2. Point – has no size; length, width, or height. It is represented by a dot and named by a capital letter. 3. Line – set of points which has infinite length but no width or height. A line is named by a lower case, cursive letter or by any two points on the line. 4. Plane – set of points that has infinite length and width but no height. We name a plane with a capital ‘funny font’ letter. 5. Collinear points – points that lie on the same line. 6. Noncollinear points – points that do not lie on the same line. 7. Coplanar points – points that lie on the same plane. 8. Noncoplanar points – points that do not lie on the same plane. 9. Segment – part of a line that consists of two points called endpoints and all points between them. 10. Ray- is the part of a line that contains an endpoint and all points extending in the other direction. 11. Congruent segments – segments that have the same length. 12. Bisector of a segment – line, ray segment, or plane that divides a segment into two congruent segments. 13. Midpoint of a segment – a point that divides the segment into two congruent segments. 14. Acute angle – angle whose measure is between 0 degrees and 90 degrees. 15. Right angle – angle whose measure is 90 degrees.