Stellar Occultation Studies of Saturn's Rings with the Hubble Space Telescope
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Submission Completed
Your abstract submission has been received Print this page You have submitted the following abstract to GSA Annual Meeting in Denver, Colorado, USA - 2016. Receipt of this notice does not guarantee that your submission was complete or free of errors. PLUTO IS THE NEW MARS! MOORE, Jeffrey M.1, MCKINNON, William B.2, SPENCER, John R.3, HOWARD, Alan D.4, GRUNDY, William M.5, STERN, S. Alan3, WEAVER, Harold A.6, YOUNG, Leslie A.3, ENNICO, Kimberly1 and OLKIN, Cathy3, (1)NASA Ames Research Center, Space Science Division, MS-245-3, Moffett Field, CA 95129, (2)Washington University, Department of Earth and Planetary Sciences and McDonnell Center for the Space Sciences, One Brookings Drive, Saint Louis, MO 63130, (3)Southwest Research Institute, Boulder, CO 80302, (4)Department of Environmental Sciences, Univerisity of Virginia, PO Box 400123, Charlottesville, VA 22904-4123, (5)Lowell Observatory, Flagstaff, AZ 86001, (6)Applied Physics Laboratory, Johns Hopkins University, Laurel, MD 20723, [email protected] Data from NASA’s New Horizons encounter with Pluto in July 2015 revealed an astoundingly complex world. The surface seen on the encounter hemisphere ranged in age from ancient to recent. A vast craterless plain of slowly convecting solid nitrogen resides in a deep primordial impact basin, reminiscent of young enigmatic deposits in Mars’ Hellas basin. Like Mars, regions of Pluto are dominated by valleys, though the Pluto valleys are thought to be carved by nitrogen glaciers. Pluto has fretted terrain and halo craters. Pluto is cut by tectonics of several different ages. Like Mars, vast tracts on Pluto are mantled by dust and volatiles. -

New Horizons Pluto/KBO Mission Impact Hazard
New Horizons Pluto/KBO Mission Impact Hazard Hal Weaver NH Project Scientist The Johns Hopkins University Applied Physics Laboratory Outline • Background on New Horizons mission • Description of Impact Hazard problem • Impact Hazard mitigation – Hubble Space Telescope plays a key role New Horizons: To Pluto and Beyond The Initial Reconnaissance of The Solar System’s “Third Zone” KBOs Pluto-Charon Jupiter System 2016-2020 July 2015 Feb-March 2007 Launch Jan 2006 PI: Alan Stern (SwRI) PM: JHU Applied Physics Lab New Horizons is NASA’s first New Frontiers Mission Frontier of Planetary Science Explore a whole new region of the Solar System we didn’t even know existed until the 1990s Pluto is no longer an outlier! Pluto System is prototype of KBOs New Horizons gives the first close-up view of these newly discovered worlds New Horizons Now (overhead view) NH Spacecraft & Instruments 2.1 meters Science Team: PI: Alan Stern Fran Bagenal Rick Binzel Bonnie Buratti Andy Cheng Dale Cruikshank Randy Gladstone Will Grundy Dave Hinson Mihaly Horanyi Don Jennings Ivan Linscott Jeff Moore Dave McComas Bill McKinnon Ralph McNutt Scott Murchie Cathy Olkin Carolyn Porco Harold Reitsema Dennis Reuter Dave Slater John Spencer Darrell Strobel Mike Summers Len Tyler Hal Weaver Leslie Young Pluto System Science Goals Specified by NASA or Added by New Horizons New Horizons Resolution on Pluto (Simulations of MVIC context imaging vs LORRI high-resolution "noodles”) 0.1 km/pix The Best We Can Do Now 0.6 km/pix HST/ACS-PC: 540 km/pix New Horizons Science Status • -
New Horizons: Reconnaissance of the Pluto-Charon System and The
C.T. Russell Editor New Horizons Reconnaissance of the Pluto-Charon System and the Kuiper Belt Previously published in Space Science Reviews Volume 140, Issues 1–4, 2008 C.T. Russell Institute of Geophysics & Planetary Physics University of California Los Angeles, CA, USA Cover illustration: NASA’s New Horizons spacecraft was launched on 2006 January 19, received a grav- ity assist during a close approach to Jupiter on 2007 February 28, and is now headed for a flyby with closest approach 12,500 km from the center of Pluto on 2015 July 14. This artist’s depiction shows the spacecraft shortly after passing above Pluto’s highly variegated surface, which may have black-streaked surface deposits produced from cryogenic geyser activity, and just before passing into Pluto’s shadow when solar and earth occultation experiments will probe Pluto’s tenuous, and possibly hazy, atmosphere. Sunlit crescents of Pluto’s moons Charon, Nix, and Hydra are visible in the background. After flying through the Pluto system, the New Horizons spacecraft could be re-targeted towards other Kuiper Belt Objects in an extended mission phase. This image is based on an original painting by Dan Durda. © Dan Durda 2001 All rights reserved. Back cover illustration: The New Horizons spacecraft was launched aboard an Atlas 551 rocket from the NASA Kennedy Space Center on 2008 January 19 at 19:00 UT. Library of Congress Control Number: 2008944238 DOI: 10.1007/978-0-387-89518-5 ISBN-978-0-387-89517-8 e-ISBN-978-0-387-89518-5 Printed on acid-free paper. -

New Horizons Ultima Thule Flyby Events
New Horizons Ultima Thule Flyby Events – Dec 31, 2018 – Jan 3, 2019 Event Date/Time Communications Event Speaker 31 Dec 12:00 PM K‐Center Opens at Noon Guest Ops team 1:00 Welcome Adrian Hill and VIP Welcome 1:05 The New Horizons Mission Alan Stern 1:25 What is the Kuiper Belt and what are Kuiper Belt Hal Weaver Objects 1:30 What We Know About MU69 – Ultima Thule Cathy Olkin 1:35 The Flyby of MU69 – Ultima Thule John Spencer NYE press 2:00 – 3:00 Daily media update on Webcast Mike Buckley; panel: Alan Stern, Helene Winters, John Spencer, Fred Pelletier. 3:15 ‐ 3:45 Flyby Ask Me Anything Webcast Moderator Adrian Hill; Panelists: Kelsi Singer; Alex Parker; Gabe Rogers 3:45 – 3:50 Song ‐ Acoustic Craig Werth – move to dining area 3:50 ‐ 4:45 Exploration for Kids Janet Ivey of Janet’s Planet ‐ dining area 4:45‐4:50 Closeout Afternoon 5:00 Doors Close for 2 hours – dinner break 7:00 PM K center reopens Kick off. 8:00 Welcome Adrian Hill and VIPs 8:10 Solar System Archaeology Ken Lacovara 8:15 NASA’s Study of Ancient Bodies. Small bodies mission panel. OSIRIS‐REx (Barnouin), Lucy (Levison), Psyche (Elkins), NH (Stern) *NASA Rep 9:00 Short break Transition to Guest ops. 9:15 Craig Werth Video Craig Werth 9:20 Doing Geology by Looking Up; Doing Walter Alvarez Astronomy by Looking Down 9:35 Pluto Flyby: Summer of 2015 Hal Weaver 9:50 Pluto and the Human Imagination David Grinspoon 10:10 Break 10:20 Meet the New Horizons Team Alan Stern and Helene Winters 10:30 Finding MU69 – Ultima Thule Marc Buie 10:45 MU69: What we expect to learn Panel: Silvia Protopapa, Hal Weaver, Cathy Olkin, John Spencer 11:00 The Eyes and Ears of New Horizons Kelsi Singer, Kirby Runyon. -

New Horizons SOC to Instrument Pipeline ICD
New Horizons SOC to Instrument Pipeline ICD September 2017 SwRI® Project 05310 Document No. 05310-SOCINST-01 Contract NASW-02008 Prepared by SOUTHWEST RESEARCH INSTITUTE® Space Science and Engineering Division 6220 Culebra Road, San Antonio, Texas 78228-0510 (210) 684-5111 FAX (210) 647-4325 Southwest Research Institute 05310-SOCINST-01 Rev 0 Chg 0 New Horizons SOC to Instrument Pipeline ICD Page ii New Horizons SOC to Instrument Pipeline ICD SwRI Project 05310 Document No. 05310-SOCINST-01 Contract NASW-02008 Prepared by: Joe Peterson 08 November 2013 Revised by: Brian Carcich August, 2014 Revised by: Tiffany Finley March, 2016 Revised by: Tiffany Finley October, 2016 Revised by: Brian Carcich December, 2016 Revised by: Tiffany Finley, Brian Carcich, PEPSSI team April, 2017 Revised by: Tiffany Finley, PEPSSI team September, 2017 Contributors: ALICE specifics prepared by: Maarten Versteeg, Joel Parker, & Andrew Steffl LEISA specifics prepared by: George McCabe & Allen Lunsford LORRI specifics prepared by: Hal Weaver & Howard Taylor MVIC specifics prepared by: Cathy Olkin PEPSSI specifics prepared by: Stefano Livi, Matthew Hill, Lawrence Brown, & Peter Kollman REX specifics prepared by: Ivan Linscott & Brian Carcich SDC specifics prepared by: David James SWAP specifics prepared by: Heather Elliott Southwest Research Institute 05310-SOCINST-01 Rev 0 Chg 0 New Horizons SOC to Instrument Pipeline ICD Page iii General Approval Signatures: Approved by: ____________________________________ Date: ____________ Hal Weaver, JHU/APL, Project Scientist -
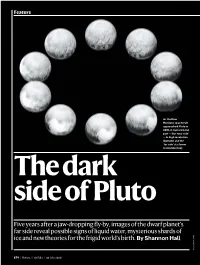
Five Years After a Jaw-Dropping Fly-By, Images of the Dwarf Planet's Far Side Reveal Possible Signs of Liquid Water, Mysteriou
Feature As the New Horizons spacecraft approached Pluto in 2015, it captured one part — the ‘near side’ — in high resolution (bottom) and the ‘far side’ at a lower resolution (top). The dark side of Pluto Five years after a jaw-dropping fly-by, images of the dwarf planet’s far side reveal possible signs of liquid water, mysterious shards of ice and new theories for the frigid world’s birth. By Shannon Hall NASA/JHUAPL/SWRI 674 | Nature | Vol 583 | 30 July 2020 ©2020 Spri nger Nature Li mited. All rights reserved. ©2020 Spri nger Nature Li mited. All rights reserved. hen NASA’s New Horizons their origin one of the biggest mysteries on fuzzy, the images revealed a world — at that spacecraft zipped past Pluto the dwarf planet. time still defined as a planet — that had more in 2015, it showed a world that “Pluto is the gift that keeps on giving,” says large-scale contrast than any other in the was much more dynamic than Richard Binzel, a planetary scientist at the Solar System, except Earth. anyone had imagined. The Massachusetts Institute of Technology in Cam- It was a tantalizing hint that suggested dwarf planet hosts icy nitro- bridge and a New Horizons co-investigator. Pluto might be a dynamic world — and was gen cliffs that resemble the quickly verified in July 2015 when New Hori- rugged coast of Norway, and A splashy start zons famously spotted a heart-shaped fea- Wgiant shards of methane ice that soar to the When Clyde Tombaugh, a young astronomer ture just north of the near side’s equator. -

New Horizons Pluto Flyby
National Aeronautics and Space Administration PRESS KIT | July 2015 New Horizons Pluto Flyby www.nasa.gov Table of Contents NASA’s New Horizons Nears Historic Pluto Flyby .................................................................................................... 5 Media Services Information .................................................................................................................................... 6 Quick Facts .............................................................................................................................................................. 7 Meet Pluto ............................................................................................................................................................... 9 Why Pluto and the Kuiper Belt? .............................................................................................................................12 The Science of New Horizons ................................................................................................................................12 New Horizons Science Team .................................................................................................................................17 Mission Overview ...................................................................................................................................................18 Spacecraft Systems and Components .................................................................................................................. -

Comparative Kbology: Using Surface Spectra of Triton, Pluto, and Charon
COMPARATIVE KBOLOGY: USING SURFACE SPECTRA OF TRITON, PLUTO, AND CHARON TO INVESTIGATE ATMOSPHERIC, SURFACE, AND INTERIOR PROCESSES ON KUIPER BELT OBJECTS by BRYAN JASON HOLLER B.S., Astronomy (High Honors), University of Maryland, College Park, 2012 B.S., Physics, University of Maryland, College Park, 2012 M.S., Astronomy, University of Colorado, 2015 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirement for the degree of Doctor of Philosophy Department of Astrophysical and Planetary Sciences 2016 This thesis entitled: Comparative KBOlogy: Using spectra of Triton, Pluto, and Charon to investigate atmospheric, surface, and interior processes on KBOs written by Bryan Jason Holler has been approved for the Department of Astrophysical and Planetary Sciences Dr. Leslie Young Dr. Fran Bagenal Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. ii ABSTRACT Holler, Bryan Jason (Ph.D., Astrophysical and Planetary Sciences) Comparative KBOlogy: Using spectra of Triton, Pluto, and Charon to investigate atmospheric, surface, and interior processes on KBOs Thesis directed by Dr. Leslie Young This thesis presents analyses of the surface compositions of the icy outer Solar System objects Triton, Pluto, and Charon. Pluto and its satellite Charon are Kuiper Belt Objects (KBOs) while Triton, the largest of Neptune’s satellites, is a former member of the KBO population. Near-infrared spectra of Triton and Pluto were obtained over the previous 10+ years with the SpeX instrument at the IRTF and of Charon in Summer 2015 with the OSIRIS instrument at Keck. -

Dr. Alan Stern Principal Investigator New Horizons Mission National Aeronautics and Space Administration
Testimony before the House of Representatives Committee on Science, Space, and Technology Exploration of the Solar System: From Mercury to Pluto and Beyond Dr. Alan Stern Principal Investigator New Horizons Mission National Aeronautics and Space Administration PRESS KIT | July 2015 New Horizons Pluto Flyby www.nasa.gov Table of Contents NASA’s New Horizons Nears Historic Pluto Flyby .................................................................................................... 5 Media Services Information .................................................................................................................................... 6 Quick Facts .............................................................................................................................................................. 7 Meet Pluto ............................................................................................................................................................... 9 Why Pluto and the Kuiper Belt? .............................................................................................................................12 The Science of New Horizons ................................................................................................................................12 New Horizons Science Team .................................................................................................................................17 Mission Overview ...................................................................................................................................................18 -

Lucy Mission to Trojan Asteroids 22 Juno's Extended Mission Begins Energy Storage Solutions
SUMMER 2021 LUCY MISSION ENERGY JUNO’S EXTENDED TO TROJAN STORAGE MISSION BEGINS 2 ASTEROIDS 8 SOLUTIONS 22 In the Supercritical Transformational Electric Power (STEP) pilot plant located on the SwRI grounds, this bypass compressor provides supercritical carbon dioxide at high pressures, in excess of 3,500 pounds per square inch. The CO2 is then heated to over 1,300 F and expanded through a turbine, which drives both the compressor and generator, outputting 10 megawatts of electrical power. This high-efficiency power cycle is a leading technology for concentrating solar power, waste heat recovery, fossil-fuel, nuclear and geothermal applications. SUMMER 2021 • VOLUME 42, NO. 2 CONTENTS ON THE COVER The SwRI-led Lucy mission 2 Diamonds in the Sky – Lucy’s 19 Collaborative Bioscience Projects is powered by solar panels D024909 that, once fully extended, Mission to the Trojan Asteroids 20 Integrated Corridor Management could cover a five-story 8 Power Plant- and Grid-Scale building. Shown here in a 22 Juno’s Extended Mission close-up, the enormous arrays Storage Solutions Intelligent Transportation will allow the Lucy spacecraft 27 to travel farther from the 17 Activity on Martian Sand Dune 28 Techbytes Sun than any previous solar-powered mission. 18 PUNCH Milestone 32 Awards & Achievements IMAGE COURTESY LOCKHEED MARTIN LOCKHEED COURTESY IMAGE This edition of Technology Today magazine takes more environmentally friendly future. This feature us beyond Mars, the asteroid belt and out to the describes no fewer than six new technologies, all orbit of Jupiter, the largest planet in our solar under development at SwRI, designed to fill the gap D024089_2653 system. -

New Horizons Pluto/KB Mission Status Report for OPAG PI Alan Stern Swri New Horizons/New Frontiers 1
New Horizons Pluto/KB Mission Status Report for OPAG PI Alan Stern SwRI New Horizons/New Frontiers 1 KBOs Pluto-Charon Jupiter System 2016-2020 July 2015 Feb-March 2007 Launch Jan 2006 NH SPACECRAFT AND PAYLOAD Science Team: 2.1 meters PI: Alan Stern Fran Bagenal Rick Binzel Bonnie Buratti Andy Cheng Dale Cruikshank Randy Gladstone Will Grundy Dave Hinson Mihaly Horanyi Don Jennings Ivan Linscott Jeff Moore Dave McComas Bill McKinnon Ralph McNutt Scott Murchie Cathy Olkin Carolyn Porco Harold Reitsema Dennis Reuter John Spencer Darrell Strobel Mike Summers Len Tyler Hal Weaver Both spacecraft and payload are performing well. Leslie Young HIGH PAYLOAD FUNTIONAL REDUNDANCY JUPITER SUCCESS! WITH A BEVY OF NEW SCIENCE Crossed Uranus orbit 2011-March-18 (Same day MESSENGER entered Mercury orbit) Crossing Neptune orbit 2014-August-25 (Exactly 25 years after Voyager 2/Triton) Pluto Closest Approach 2015-July-14 (Exactly 50 years after Mariner 4/Mars) PLUTO SYSTEM ENCOUNTER: SCIENCE OBJECTIVES ENCOUNTER GEOMETRY AND NOMENCLATURE 2015 Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec AP1! AP2! DP2! DP3! AP3! NEP! DP1! AP - Approach Phase, DP - Departure Phase, NEP – Near Encounter Phase MISSION STATUS • New Horizons is healthy and remains on track – The science objectives should be achieved or exceeded • Nix, Hydra, Kerberus (P4), and Styx (P5) added (new discoveries) • More data to be collected than originally planned (~7x larger) – Robust encounter timeline with built-in redundancy to ensure success – Largely complete. • Encounter Rehearsals Completed -

Download Full Issue
EAPS Scope NEWSLETTER OF THE DEPARTMENT OF EARTH, ATMOSPHERIC AND PLANETARY SCIENCES | 2015-2016 THE Climate Issue News PAGE 7 Friends PAGE 28 As a global leader in climate science Sam Bowring and Sara Seager elected Read about past and future EAPS lectures EAPS is unique in its interdisciplinary to the National Academy of Sciences and events • Two new fellowships and approach. This issue of EAPS Scope is • Faculty promotions • Clark Burchfiel a professorship announced • Donor packed with stories about how our broad retires • Introducing Assistant Professor Profiles • The first annual Patrons Circle range of research and collaboration are Kristin Bergmann • Recent faculty honors event • Exciting travel opportunities helping us gain a deeper understanding • Research in the spotlight • Graduate with our faculty • Find out how you can of the history and future of climates—from student profiles • Degrees Awarded in help us to continue to attract the best here on earth to planets far, far away. 2014-2015 and the brightest to EAPS EDITORS-IN-CHIEF LETTER Angela Ellis Jennifer Fentress FROM THE DEPARTMENT COMMUNICATIONS OFFICER Helen Hill HEAD Dear Alumni and Friends, CHIEF WRITER Marc Levy Attention has been riveted on Pluto since the New Horizons mission began beaming back those first startling images of the icy dwarf planet at the edge of our solar system. It made us all very proud to see CONTRIBUTING WRITERS EAPS alumnae, faculty, and students on NASA TV, the Angela Ellis news, and on the internet this summer, and to reflect Jennifer Fentress on EAPS scientists’ role in this historic mission. We’re Cassie Martin especially mindful of the contribution of the late Jim Elliot, professor of planetary science and physics at Kurt Sternlof MIT, who discovered Pluto’s atmosphere.