New Horizons: Reconnaissance of the Pluto-Charon System and The
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Submission Completed
Your abstract submission has been received Print this page You have submitted the following abstract to GSA Annual Meeting in Denver, Colorado, USA - 2016. Receipt of this notice does not guarantee that your submission was complete or free of errors. PLUTO IS THE NEW MARS! MOORE, Jeffrey M.1, MCKINNON, William B.2, SPENCER, John R.3, HOWARD, Alan D.4, GRUNDY, William M.5, STERN, S. Alan3, WEAVER, Harold A.6, YOUNG, Leslie A.3, ENNICO, Kimberly1 and OLKIN, Cathy3, (1)NASA Ames Research Center, Space Science Division, MS-245-3, Moffett Field, CA 95129, (2)Washington University, Department of Earth and Planetary Sciences and McDonnell Center for the Space Sciences, One Brookings Drive, Saint Louis, MO 63130, (3)Southwest Research Institute, Boulder, CO 80302, (4)Department of Environmental Sciences, Univerisity of Virginia, PO Box 400123, Charlottesville, VA 22904-4123, (5)Lowell Observatory, Flagstaff, AZ 86001, (6)Applied Physics Laboratory, Johns Hopkins University, Laurel, MD 20723, [email protected] Data from NASA’s New Horizons encounter with Pluto in July 2015 revealed an astoundingly complex world. The surface seen on the encounter hemisphere ranged in age from ancient to recent. A vast craterless plain of slowly convecting solid nitrogen resides in a deep primordial impact basin, reminiscent of young enigmatic deposits in Mars’ Hellas basin. Like Mars, regions of Pluto are dominated by valleys, though the Pluto valleys are thought to be carved by nitrogen glaciers. Pluto has fretted terrain and halo craters. Pluto is cut by tectonics of several different ages. Like Mars, vast tracts on Pluto are mantled by dust and volatiles. -

New Horizons Pluto/KBO Mission Impact Hazard
New Horizons Pluto/KBO Mission Impact Hazard Hal Weaver NH Project Scientist The Johns Hopkins University Applied Physics Laboratory Outline • Background on New Horizons mission • Description of Impact Hazard problem • Impact Hazard mitigation – Hubble Space Telescope plays a key role New Horizons: To Pluto and Beyond The Initial Reconnaissance of The Solar System’s “Third Zone” KBOs Pluto-Charon Jupiter System 2016-2020 July 2015 Feb-March 2007 Launch Jan 2006 PI: Alan Stern (SwRI) PM: JHU Applied Physics Lab New Horizons is NASA’s first New Frontiers Mission Frontier of Planetary Science Explore a whole new region of the Solar System we didn’t even know existed until the 1990s Pluto is no longer an outlier! Pluto System is prototype of KBOs New Horizons gives the first close-up view of these newly discovered worlds New Horizons Now (overhead view) NH Spacecraft & Instruments 2.1 meters Science Team: PI: Alan Stern Fran Bagenal Rick Binzel Bonnie Buratti Andy Cheng Dale Cruikshank Randy Gladstone Will Grundy Dave Hinson Mihaly Horanyi Don Jennings Ivan Linscott Jeff Moore Dave McComas Bill McKinnon Ralph McNutt Scott Murchie Cathy Olkin Carolyn Porco Harold Reitsema Dennis Reuter Dave Slater John Spencer Darrell Strobel Mike Summers Len Tyler Hal Weaver Leslie Young Pluto System Science Goals Specified by NASA or Added by New Horizons New Horizons Resolution on Pluto (Simulations of MVIC context imaging vs LORRI high-resolution "noodles”) 0.1 km/pix The Best We Can Do Now 0.6 km/pix HST/ACS-PC: 540 km/pix New Horizons Science Status • -

Measurements of the Interplanetary Dust Population by the Venetia Burney Student Dust Counter on the New Horizons Mission Andrew R
41st Lunar and Planetary Science Conference (2010) 1219.pdf Measurements of the Interplanetary Dust Population by the Venetia Burney Student Dust Counter on the New Horizons Mission Andrew R. Poppe1,2, David James1, Brian Jacobsmeyer1,2, and Mihaly Hor´anyi1,2, 1Laboratory for Atmospheric and Space Physics, Boulder, CO, and 2Department of Physics, University of Colorado, Boulder, CO, ([email protected]) Introduction: The Venetia Burney Student Dust Counter (SDC) on the New Horizons mission is an in- strument designed to measure the spatial density of in- terplanetary dust particles with mass, m > 10−12 g, on a radial profile throughout the solar system [1]. The instrument consists of fourteen permanently-polarized polyvinylidene fluoride (PVDF) detectors that register a charge when impacted by a hypervelocity(v> 1 km/sec) dust particle. PVDF-style dust detectors have previously flown on the Vega 1 and 2 [2] and Cassini spacecraft [3]. The instrument has a total surface area of 0.11 m2, a one- second time resolution and a factor of two in mass reso- lution. When impacted by a hypervelocity dust particle, the instrument records the time, charge, threshold and detector number. SDC is part of the Education and Pub- lic Outreach program of New Horizons, and as such, was designed, tested, integrated and is now operated solely by students. New Horizons was launched on January 19, 2006 and encountered Jupiter on February 28, 2007. Prior to the Jupiter encounter, SDC took measurements in two main Figure 1: The New Horizons flight path up to January 1, 2010. periods of the inner solar system: 2.66-3.55 A.U. -

Anticipated Scientific Investigations at the Pluto System
Space Sci Rev (2008) 140: 93–127 DOI 10.1007/s11214-008-9462-9 New Horizons: Anticipated Scientific Investigations at the Pluto System Leslie A. Young · S. Alan Stern · Harold A. Weaver · Fran Bagenal · Richard P. Binzel · Bonnie Buratti · Andrew F. Cheng · Dale Cruikshank · G. Randall Gladstone · William M. Grundy · David P. Hinson · Mihaly Horanyi · Donald E. Jennings · Ivan R. Linscott · David J. McComas · William B. McKinnon · Ralph McNutt · Jeffery M. Moore · Scott Murchie · Catherine B. Olkin · Carolyn C. Porco · Harold Reitsema · Dennis C. Reuter · John R. Spencer · David C. Slater · Darrell Strobel · Michael E. Summers · G. Leonard Tyler Received: 5 January 2007 / Accepted: 28 October 2008 / Published online: 3 December 2008 © Springer Science+Business Media B.V. 2008 L.A. Young () · S.A. Stern · C.B. Olkin · J.R. Spencer Southwest Research Institute, Boulder, CO, USA e-mail: [email protected] H.A. Weaver · A.F. Cheng · R. McNutt · S. Murchie Johns Hopkins University Applied Physics Lab., Laurel, MD, USA F. Bagenal · M. Horanyi University of Colorado, Boulder, CO, USA R.P. Binzel Massachusetts Institute of Technology, Cambridge, MA, USA B. Buratti Jet Propulsion Laboratory, Pasadena, CA, USA D. Cruikshank · J.M. Moore NASA Ames Research Center, Moffett Field, CA, USA G.R. Gladstone · D.J. McComas · D.C. Slater Southwest Research Institute, San Antonio, TX, USA W.M. Grundy Lowell Observatory, Flagstaff, AZ, USA D.P. Hinson · I.R. Linscott · G.L. Tyler Stanford University, Stanford, CA, USA D.E. Jennings · D.C. Reuter NASA Goddard Space Flight Center, Greenbelt, MD, USA 94 L.A. Young et al. -

New Horizons Ultima Thule Flyby Events
New Horizons Ultima Thule Flyby Events – Dec 31, 2018 – Jan 3, 2019 Event Date/Time Communications Event Speaker 31 Dec 12:00 PM K‐Center Opens at Noon Guest Ops team 1:00 Welcome Adrian Hill and VIP Welcome 1:05 The New Horizons Mission Alan Stern 1:25 What is the Kuiper Belt and what are Kuiper Belt Hal Weaver Objects 1:30 What We Know About MU69 – Ultima Thule Cathy Olkin 1:35 The Flyby of MU69 – Ultima Thule John Spencer NYE press 2:00 – 3:00 Daily media update on Webcast Mike Buckley; panel: Alan Stern, Helene Winters, John Spencer, Fred Pelletier. 3:15 ‐ 3:45 Flyby Ask Me Anything Webcast Moderator Adrian Hill; Panelists: Kelsi Singer; Alex Parker; Gabe Rogers 3:45 – 3:50 Song ‐ Acoustic Craig Werth – move to dining area 3:50 ‐ 4:45 Exploration for Kids Janet Ivey of Janet’s Planet ‐ dining area 4:45‐4:50 Closeout Afternoon 5:00 Doors Close for 2 hours – dinner break 7:00 PM K center reopens Kick off. 8:00 Welcome Adrian Hill and VIPs 8:10 Solar System Archaeology Ken Lacovara 8:15 NASA’s Study of Ancient Bodies. Small bodies mission panel. OSIRIS‐REx (Barnouin), Lucy (Levison), Psyche (Elkins), NH (Stern) *NASA Rep 9:00 Short break Transition to Guest ops. 9:15 Craig Werth Video Craig Werth 9:20 Doing Geology by Looking Up; Doing Walter Alvarez Astronomy by Looking Down 9:35 Pluto Flyby: Summer of 2015 Hal Weaver 9:50 Pluto and the Human Imagination David Grinspoon 10:10 Break 10:20 Meet the New Horizons Team Alan Stern and Helene Winters 10:30 Finding MU69 – Ultima Thule Marc Buie 10:45 MU69: What we expect to learn Panel: Silvia Protopapa, Hal Weaver, Cathy Olkin, John Spencer 11:00 The Eyes and Ears of New Horizons Kelsi Singer, Kirby Runyon. -

GUIDANCE, NAVIGATION, and CONTROL 2020 AAS PRESIDENT Carol S
GUIDANCE, NAVIGATION, AND CONTROL 2020 AAS PRESIDENT Carol S. Lane Cynergy LLC VICE PRESIDENT – PUBLICATIONS James V. McAdams KinetX Inc. EDITOR Jastesh Sud Lockheed Martin Space SERIES EDITOR Robert H. Jacobs Univelt, Incorporated Front Cover Illustration: Image: Checkpoint-Rehearsal-Movie-1024x720.gif Caption: “OSIRIS-REx Buzzes Sample Site Nightingale” Photo and Caption Credit: NASA/Goddard/University of Arizona Public Release Approval: Per multimedia guidelines from NASA Frontispiece Illustration: Image: NASA_Orion_EarthRise.jpg Caption: “Orion Primed for Deep Space Exploration” Photo Credit: NASA Public Release Approval: Per multimedia guidelines from NASA GUIDANCE, NAVIGATION, AND CONTROL 2020 Volume 172 ADVANCES IN THE ASTRONAUTICAL SCIENCES Edited by Jastesh Sud Proceedings of the 43rd AAS Rocky Mountain Section Guidance, Navigation and Control Conference held January 30 to February 5, 2020, Breckenridge, Colorado Published for the American Astronautical Society by Univelt, Incorporated, P.O. Box 28130, San Diego, California 92198 Web Site: http://www.univelt.com Copyright 2020 by AMERICAN ASTRONAUTICAL SOCIETY AAS Publications Office P.O. Box 28130 San Diego, California 92198 Affiliated with the American Association for the Advancement of Science Member of the International Astronautical Federation First Printing 2020 Library of Congress Card No. 57-43769 ISSN 0065-3438 ISBN 978-0-87703-669-2 (Hard Cover Plus CD ROM) ISBN 978-0-87703-670-8 (Digital Version) Published for the American Astronautical Society by Univelt, Incorporated, P.O. Box 28130, San Diego, California 92198 Web Site: http://www.univelt.com Printed and Bound in the U.S.A. FOREWORD HISTORICAL SUMMARY The annual American Astronautical Society Rocky Mountain Guidance, Navigation and Control Conference began as an informal exchange of ideas and reports of achievements among local guidance and control specialists. -

New Horizons SOC to Instrument Pipeline ICD
New Horizons SOC to Instrument Pipeline ICD September 2017 SwRI® Project 05310 Document No. 05310-SOCINST-01 Contract NASW-02008 Prepared by SOUTHWEST RESEARCH INSTITUTE® Space Science and Engineering Division 6220 Culebra Road, San Antonio, Texas 78228-0510 (210) 684-5111 FAX (210) 647-4325 Southwest Research Institute 05310-SOCINST-01 Rev 0 Chg 0 New Horizons SOC to Instrument Pipeline ICD Page ii New Horizons SOC to Instrument Pipeline ICD SwRI Project 05310 Document No. 05310-SOCINST-01 Contract NASW-02008 Prepared by: Joe Peterson 08 November 2013 Revised by: Brian Carcich August, 2014 Revised by: Tiffany Finley March, 2016 Revised by: Tiffany Finley October, 2016 Revised by: Brian Carcich December, 2016 Revised by: Tiffany Finley, Brian Carcich, PEPSSI team April, 2017 Revised by: Tiffany Finley, PEPSSI team September, 2017 Contributors: ALICE specifics prepared by: Maarten Versteeg, Joel Parker, & Andrew Steffl LEISA specifics prepared by: George McCabe & Allen Lunsford LORRI specifics prepared by: Hal Weaver & Howard Taylor MVIC specifics prepared by: Cathy Olkin PEPSSI specifics prepared by: Stefano Livi, Matthew Hill, Lawrence Brown, & Peter Kollman REX specifics prepared by: Ivan Linscott & Brian Carcich SDC specifics prepared by: David James SWAP specifics prepared by: Heather Elliott Southwest Research Institute 05310-SOCINST-01 Rev 0 Chg 0 New Horizons SOC to Instrument Pipeline ICD Page iii General Approval Signatures: Approved by: ____________________________________ Date: ____________ Hal Weaver, JHU/APL, Project Scientist -

Pluto-Bound CU Instrument Renamed for Girl Who Named Ninth Planet in 1930 30 June 2006
Pluto-Bound CU Instrument Renamed For Girl Who Named Ninth Planet In 1930 30 June 2006 The University of Colorado at Boulder student-built Research Associate Mihaly Horanyi, principal science instrument on NASA's New Horizons investigator for the student instrument. The CU- mission to Pluto has been renamed to honor Boulder team should be able to infer the population another famous student -- the 11-year-old girl who of comets and other distant colliding bodies that are named the ninth planet more than 75 years ago. too small to detect with telescopes, he said. For the rest of the New Horizons spacecraft's The dust counter also could be used to search for voyage to Pluto and the Kuiper Belt beyond, the dust in the Pluto system, said Horanyi, a CU- Student Dust Counter -- the first science Boulder professor of physics. Such dust might be instrument on a NASA planetary mission to be generated by collisions of tiny impactors on Pluto designed, built and operated by students -- will be and its moons, Charon, Nix and Hydra. known as the Venetia Burney Student Dust Counter, or "Venetia," for short. The new name The device combines an 18-by-12-inch detector honors Venetia Burney Phair, now 87 and living in mounted on the outside of the spacecraft with an Epsom, England, who offered the name "Pluto" for electronics box inside the craft that determines the the newly discovered ninth planet in 1930. mass and speed of the particles that hit the detector, he said. Because no dust detector has "It's fitting that we name an instrument built by ever flown beyond 18 astronomical units from the students after Mrs. -
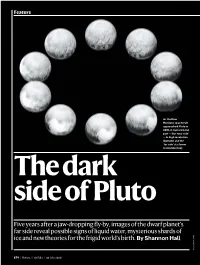
Five Years After a Jaw-Dropping Fly-By, Images of the Dwarf Planet's Far Side Reveal Possible Signs of Liquid Water, Mysteriou
Feature As the New Horizons spacecraft approached Pluto in 2015, it captured one part — the ‘near side’ — in high resolution (bottom) and the ‘far side’ at a lower resolution (top). The dark side of Pluto Five years after a jaw-dropping fly-by, images of the dwarf planet’s far side reveal possible signs of liquid water, mysterious shards of ice and new theories for the frigid world’s birth. By Shannon Hall NASA/JHUAPL/SWRI 674 | Nature | Vol 583 | 30 July 2020 ©2020 Spri nger Nature Li mited. All rights reserved. ©2020 Spri nger Nature Li mited. All rights reserved. hen NASA’s New Horizons their origin one of the biggest mysteries on fuzzy, the images revealed a world — at that spacecraft zipped past Pluto the dwarf planet. time still defined as a planet — that had more in 2015, it showed a world that “Pluto is the gift that keeps on giving,” says large-scale contrast than any other in the was much more dynamic than Richard Binzel, a planetary scientist at the Solar System, except Earth. anyone had imagined. The Massachusetts Institute of Technology in Cam- It was a tantalizing hint that suggested dwarf planet hosts icy nitro- bridge and a New Horizons co-investigator. Pluto might be a dynamic world — and was gen cliffs that resemble the quickly verified in July 2015 when New Hori- rugged coast of Norway, and A splashy start zons famously spotted a heart-shaped fea- Wgiant shards of methane ice that soar to the When Clyde Tombaugh, a young astronomer ture just north of the near side’s equator. -

The Plutoed Planet 2 Read Each Source Below
Unit The Plutoed Planet 2 Read each source below . Then complete the activities on pages 10–11 . Source 1 Tri-City Tribune May 2, 1930 Child Names Planet Pluto The astronomers of Lowell Observatory have March 24, a vote was held at Lowell Observa- voted, and it is official: our solar system’s new- tory to determine the planet’s name. In addi- est planet will be named Pluto. This name was tion to Pluto, the names Minerva and Cronus first suggested by Venetia Burney, an 11-year- were also on the ballot. Yesterday, the results old schoolgirl from Oxford, England. A fan of of the vote were announced, and they were mythology, Ms. Burney believed that the unanimous. Every member chose Pluto for planet should be named after Pluto, the Roman the planet’s name. god of the cold, dark underworld. Pluto now joins an exclusive club, as it Pluto’s journey from discovery to named becomes one of only nine planets in our solar planet has been quick. It was first observed system. Of these, Pluto is the farthest from on February 18 of this year by Clyde Tom- the Sun. Astronomers believe that it is the baugh at Lowell Observatory in Arizona. On coldest and smallest of the nine. Source 2 Tri-City Tribune September 14, 2006 Pluto Ousted! Pluto has always been the little planet that astronomers, while others believe Pluto should was a little different than all the others. Yes- have been stripped of its planet status long ago. terday, the International Astronomical Union (IAU) announced that Pluto will no longer be In 1930, Pluto was named the ninth planet in considered a planet. -

Federal Register/Vol. 67, No. 111/Monday, June 10
Federal Register / Vol. 67, No. 111 / Monday, June 10, 2002 / Notices 39749 ACTION: Information update and At that time NASA’s original concept scale development of a new power reopening of scoping period. was to launch the Pluto-Kuiper Express conversion system and qualification spacecraft in November 2003 or in testing of the RPS to assure its SUMMARY: On October 7, 1998, NASA December 2004 on either the Space suitability for long-duration space published in the Federal Register a Shuttle from Kennedy Space Center, missions. The development and testing notice of intent (NOI) to prepare an Florida, or an expendable launch processes would not result in an RPS environmental impact statement (EIS) vehicle from CCAFS, Florida. Both that would be fully qualified by 2006 for for NASA’s Pluto-Kuiper Express proposed trajectories would have use on the proposed mission. Thus, the Mission. The notice was issued in involved a Jupiter gravity assist mission concept has been revised to accordance with the National maneuver, allowing the spacecraft to include a conventional RTG to provide Environmental Policy Act of 1969, as arrive at Pluto in time to take advantage electrical power for the Pluto-Kuiper amended (NEPA) (42 U.S.C. 4321 et of its close orbital position relative to Belt spacecraft. Because a conventional seq.) and Council on Environmental the Sun. The original concept for the RTG would generate a greater amount of Quality and NASA’s implementing Pluto-Kuiper Express mission included heat, RHUs would no longer be needed regulations. Since publication of the the potential use of a new advanced RPS to provide auxiliary heat for spacecraft NOI, NASA prepared further under study for deep-space exploration, thermal control. -
Guidance, Navigation, and Control 2014
GUIDANCE, NAVIGATION, AND CONTROL 2014 Edited by Alexander J. May Volume 151 ADVANCES IN THE ASTRONAUTICAL SCIENCES GUIDANCE, NAVIGATION, AND CONTROL 2014 AAS PRESIDENT Lyn D. Wigbels RWI International Consulting Services VICE PRESIDENT - PUBLICATIONS Richard D. Burns NASA Goddard Space Flight Center EDITOR Alexander J. May Lockheed Martin Space Systems Co. SERIES EDITOR Robert H. Jacobs Univelt, Incorporated Front Cover Illustration: Lockheed Martin is the prime contractor building the Orion multi-purpose crew vehicle, NASA’s first spacecraft designed for long-duration, human-rated deep space exploration. Orion will transport humans to interplanetary destinations beyond low Earth orbit, such as asteroids, the moon and eventually Mars, and return them safely back to Earth. Credit: Lockheed Martin. Frontispiece: Lockheed Martin’s state-of-the-art Space Operations Simulation Center (SOSC) has completed orbital simulation tests with hardware and data that was flown on NASA’s STS-134 space shut- tle Endeavour mission to the International Space Station. The tests have demonstrated the cen- ter’s ability to replicate on-orbit conditions that affect relative navigation, lighting and motion con- trol in space — providing a simulated space dynamics and lighting environment that is unparal- leled in the space industry. Credit: Lockheed Martin. iii iv GUIDANCE, NAVIGATION, AND CONTROL 2014 Volume 151 ADVANCES IN THE ASTRONAUTICAL SCIENCES Edited by Alexander J. May Proceedings of the 37th Annual AAS Rocky Mountain Section Guidance and Control Conference held January 31 – February 5, 2014, Breckenridge, Colorado. Published for the American Astronautical Society by Univelt, Incorporated, P.O. Box 28130, San Diego, California 92198 Web Site: http://www.univelt.com v Copyright 2014 by AMERICAN ASTRONAUTICAL SOCIETY AAS Publications Office P.O.