Limiting Similarity and Niche Theory for Structured Populations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Limiting Similarity? the Ecological Dynamics of Natural Selection Among Resources and Consumers Caused by Both Apparent and Resource Competition
vol. 193, no. 4 the american naturalist april 2019 E-Article Limiting Similarity? The Ecological Dynamics of Natural Selection among Resources and Consumers Caused by Both Apparent and Resource Competition Mark A. McPeek* Department of Biological Sciences, Dartmouth College, Hanover, New Hampshire 03755 Submitted December 31, 2017; Accepted September 8, 2018; Electronically published January 17, 2019 Online enhancements: appendix, MATLAB code, video. abstract: 1959). Most explorations of this idea have focused on one Much of ecological theory presumes that natural selection — should foster species coexistence by phenotypically differentiating particular type of species interaction competition among competitors so that the stability of the community is increased, but consumers for shared resources. Resource competition is an whether this will actually occur is a question of the ecological dynamics indirect interaction between consumers that is mediated by of natural selection. I develop an evolutionary model of consumer- their effects on and responses to shared resources (Levene resource interactions based on MacArthur’s and Tilman’s classic works, 1976; Tilman 1980, 1982, 1987). If multiple resource species including both resource and apparent competition, to explore what are involved, the indirect interaction of apparent competition fosters or retards the differentiation of resources and their consumers. Analyses of this model predict that consumers will differentiate only between resources also occurs and is mediated by their effects on specific ranges of environmental gradients (e.g., greater productivity, on and responses to the consumers (Holt 1977). However, weaker stressors, lower structural complexity), and where it occurs, the MacArthur’s original exploration of these issues recast all of magnitude of differentiation also depends on gradient position. -

Broadly Inflicted Stressors Can Cause Ecosystem Thinning
Theoretical Ecology https://doi.org/10.1007/s12080-019-0417-4 ORIGINAL PAPER Broadly inflicted stressors can cause ecosystem thinning Matthew G. Burgess1,2 & Alexa Fredston-Hermann3 & David Tilman3,4 & Michel Loreau5 & Steven D. Gaines3,6 Received: 11 July 2018 /Accepted: 12 February 2019 # Springer Nature B.V. 2019 Abstract Many anthropogenic stressors broadly inflict mortality or reduce fecundity, including habitat destruction, pollution, climate change, invasive species, and multispecies harvesting. Here, we show—in four analytical models of interspecies competition—that broadly inflicted stressors disproportionately cause competitive exclusions within groups of ecologically similar species. As a result, we predict that ecosystems become progressively thinner—that is, they have progressively less functional redundancy—as broadly inflicted stressors become progressively more intense. This may negatively affect the temporal stability of ecosystem functions, but it also buffers ecosystem productivity against stress by favoring species less sensitive to the stressors. Our main result follows from the weak limiting similarity principle: species with more similar ecological niches compete more strongly, and their coexistence can be upset by smaller perturbations. We show that stressors can cause indirect competitive exclusions at much lower stressor intensity than needed to directly cause species extinction, consistent with the finding of empirical studies that species interactions are often the proximal drivers of local extinctions. The excluded species are more sensitive to the stressor relative to their ecologically similar competitors. Moreover, broadly inflicted stressors may cause hydra effects—where higher stressor intensity results in higher abundance for a species with lower sensitivity to the stressor than its competitors. Correlations between stressor impacts and ecological niches reduce the potential for indirect competitive exclusions, but they consequently also reduce the buffering effect of ecosystem thinning on ecosystem productivity. -

Resource Partitioning Among African Savanna Herbivores in North Cameroon: the Importance of Diet Composition, Food Quality and Body Mass
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Wageningen University & Research Publications Journal of Tropical Ecology (2011) 27:503–513. © Cambridge University Press 2011 doi:10.1017/S0266467411000307 Resource partitioning among African savanna herbivores in North Cameroon: the importance of diet composition, food quality and body mass H. H. de Iongh∗,1,C.B.deJong†, J. van Goethem∗,E.Klop∗, A. M. H. Brunsting†, P. E. Loth∗ and H. H. T. Prins† ∗ Institute of Environmental Sciences, Leiden University, P.O. Box 9518, 2300 RA Leiden, the Netherlands † Resource Ecology Group, Wageningen University, Droevendaalsesteeg 3a, 6708 PB Wageningen, the Netherlands (Accepted 20 June 2011) Abstract: The relationship between herbivore diet quality, and diet composition (the range of food plants consumed) and body mass on resource partitioning of herbivores remains the subject of an ongoing scientific debate. In this study we investigated the importance of diet composition and diet quality on resource partitioning among eight species of savanna herbivore in north Cameroon, with different body mass. Dung samples of four to seven wild herbivore and one domesticated species were collected in the field during the dry and wet period. Diet composition was based on microhistological examination of herbivore droppings, epidermis fragments were identified to genus or family level. In addition, the quality of the faecal droppings was determined in terms of phosphorus, nitrogen and fibre concentrations. The results showed that there was no significant correlation between body mass and (differences in) diet composition for wet and dry season. When all species are considered, only significant relationships are found by the Spearman rank correlation analyses during the wet season between body mass and phosphorus and nitrogen, but this relationship did not exist during the dry season. -

Competitive Exclusion and Limiting Similarity: a Unified Theory
International Institute for Tel: +43 2236 807 342 Applied Systems Analysis Fax: +43 2236 71313 Schlossplatz 1 E-mail: [email protected] A-2361 Laxenburg, Austria Web: www.iiasa.ac.at Interim Report IR-05-040 Competitive Exclusion and Limiting Similarity: A Unified Theory Géza Meszéna ([email protected]) Mats Gyllenberg ([email protected]) Liz Pásztor ([email protected]) Johan A. J. Metz ([email protected]) Approved by Ulf Dieckmann Program Leader, ADN August 2005 Interim Reports on work of the International Institute for Applied Systems Analysis receive only limited review. Views or opinions expressed herein do not necessarily represent those of the Institute, its National Member Organizations, or other organizations supporting the work. IIASA STUDIES IN ADAPTIVE DYNAMICS NO. 101 The Adaptive Dynamics Network at IIASA fosters the develop- ment of new mathematical and conceptual techniques for under- standing the evolution of complex adaptive systems. Focusing on these long-term implications of adaptive processes in systems of limited growth, the Adaptive Dynamics Network brings together scientists and institutions from around the world with IIASA acting as the central node. Scientific progress within the network is collected in the IIASA ADN Studies in Adaptive Dynamics series. No. 1 Metz JAJ, Geritz SAH, Meszéna G, Jacobs FJA, van No. 11 Geritz SAH, Metz JAJ, Kisdi É, Meszéna G: The Dy- Heerwaarden JS: Adaptive Dynamics: A Geometrical Study namics of Adaptation and Evolutionary Branching. IIASA of the Consequences of Nearly Faithful Reproduction. IIASA Working Paper WP-96-077 (1996). Physical Review Letters Working Paper WP-95-099 (1995). -

Stability and Persistance of Populations and Assemblages
STABILITY AND PERSISTANCE OF POPULATIONS AND ASSEMBLAGES: THEORY AND LABORATORY AND FIELD STUDIES A Departmental Thesis Presented to the Faculty of California State University, Hayward In Partial Fulfillment of the Requirements for the Degree Master of Science in Biological Science By Burke A. Strobel .Ttme, 1996 Aknowledgments I would like to thank the Moss Landing Marine Laboratories' librarians Sheila Baldridge and Joan Parker, whose efforts made many important papers available to me. The use ofJay Hager's and Brett Strobel's computers for text and graphics respectively was invaluable to the project. Discussions with Christopher Moyer solidified many of the ideas on disturbances presented. I also thank my committee members for their patience and insights, and, most of all, my wife Katie for her support, understanding, and even courage. 111 Table of Contents Acknowledgments iii Table of Contents IV List of Figures vi I. Introduction 1 IT. Stability Theory: Populations 13 Introduction 13 Carrying capacity 17 Mechanisms 25 Density dependence 29 Detection of density dependence 32 Assumptions 35 Ill. Stability Theory: Paired Interactions 37 Interspecific competition 37 Amensalism 46 IV v Predation 47 Mutualism 66 N. Stability ofMultispecies Interactions 70 Indirect effects 70 V. Stability of Assemblages 76 Considerations 76 Diversity 78 Alternative stable states 81 VI. Conclusion 84 Bibliography 89 List of Figures Figure 1. Gompertz curve of population growth 18 Figure 2. Logistic curve of population growth 19 Figure 3. Holling type I predator functional response 49 Figure 4. Holling type I1 predator functional response 50 Figure 5. Holling type ill predator functional response 51 Figure 6. Lotka-Volterra predator/prey trajectory 53 Figure 7. -

Hominid Paleoecology and Competitive Exclusion
YEARBOOK OF PHYSICAL ANTHROPOLOGY 24:101-121(1981) Hominid Paleoecology and Competitive Exclusion: Limits to Similarity, Niche Differentiation, and the Effects of Cultural Behavior BRUCE WINTERHALDER Department of Anthropology, University of North Carolina at Chapel Hill, Chapel Hill, North Carolina 27514 KEY WORDS Paleoanthropology, Hominid paleoecology, Competitive exclusion principle, Single species hypothesis, Compression hypothesis ABSTRACT Fossil evidence from the Plio-Pleistocene of Africa apparently has confirmed a multi-lineage interpretation of early hominid evolution. Empir- ical refutation of the single species hypothesis must now be matched to the ev- olutionary ecology theory, which can underwrite taxonomic assessment and help to explain sympatric hominid coexistence. This paper contributes to that goal by reassessing the ecological rationale provided for the single-species hypothesis. Limiting similarity concepts indicate that the allowable ecological overlap be- tween sympatric competitors is greater than the degrees of metric overlap often advanced as standards for identifying fossil species. Optimal foraging theory and the compression hypothesis show that the initial ecological reaction of a hominid to a sympatric competitor would likely be micro-habitat divergence and possibly also temporal differentiation of resource use. The long-term, evolutionary re- sponse is niche divergence, probably involving diet as well. General niche par- titioning studies suggest that diet and habitat are the most common dimensions of niche separation, although temporal separation is unusually frequent in car- nivores. The equation of niche with culture, basic to the single-species hypothesis, has no analytic meaning. Finally, four minor points are discussed, suggesting that (a) extinction is not unlikely, even for a long-lived and competitively com- petent hominid lineage, (b) parsimony is fickle, (c) interspecific mutualism may jeopardize survival, and (d) generalists are subordinate competitors, but for hom- inids, seemingly, successful ones. -

Integrating Dynamic and Statistical Modelling Approaches in Order to Improve Predictions for Scenarios of Environmental Change
Institut für Erd- und Umweltwissenschaften Arbeitsgruppe Environmental Modelling Integrating dynamic and statistical modelling approaches in order to improve predictions for scenarios of environmental change Kumulative Dissertation zur Erlangung des akademischen Grades "doctor rerum naturalium" (Dr. rer. nat.) in der Wissenschaftsdisziplin "Geoökologie" eingereicht an der Mathematisch-Naturwissenschaftlichen Fakultät der Universität Potsdam von Damaris Zurell aus Templin Potsdam, den 05.05.2011 Published online at the Institutional Repository of the University of Potsdam: URL http://opus.kobv.de/ubp/volltexte/2011/5684/ URN urn:nbn:de:kobv:517-opus-56845 http://nbn-resolving.de/urn:nbn:de:kobv:517-opus-56845 if tha eva does owt for nowt do it for thi sen Yorkshire saying Contents Contents CONTENTS I SUMMARY V ZUSAMMENFASSUNG VII 1 GENERAL INTRODUCTION 1 1.1 Motivation and objectives 2 1.2 State of the art 6 1.2.1 Correlative species distribution models 6 1.2.2 Mechanistic models of species distributions 11 1.2.3 ‘Hybrid’ models of species distributions 15 1.3 Thesis structure 16 2 THE VIRTUAL ECOLOGIST APPROACH: SIMULATING DATA AND OBSERVERS 19 2.1 Abstract 20 2.2 Introduction 20 2.3 The virtual ecologist approach 23 2.4 Past use of VE 26 2.4.1 Testing and improving sampling schemes and methods 26 2.4.2 Testing and comparing models 28 2.5 Discussion 33 2.5.1 Limitations 34 2.5.2 The role of mechanistic models 35 2.5.3 Future directions 36 3 STATIC SPECIES DISTRIBUTION MODELS IN DYNAMICALLY CHANGING SYSTEMS: HOW GOOD CAN PREDICTIONS REALLY -

Mammalian Herbivores As Drivers of Community Assembly
Mammalian Herbivores as Drivers of Community Assembly by Caprice M. Disbrow A thesis submitted to Sonoma State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE in Biology Committee members: Dr. Daniel E. Crocker, Chair Dr. Lisa Bentley Dr. J. Hall Cushman Dr. Marko J. Spasojevic April 20, 2018 i Copyright 2018 By Caprice M. Disbrow ii Authorization for Reproduction of Master’s Thesis Permission to reproduce parts of this thesis must be obtained from me. DATE: April 20, 2018 NAME: Caprice M. Disbrow iii Mammalian Herbivores as Drivers of Community Assembly Thesis by Caprice M. Disbrow ABSTRACT Despite growing interest in trait-based approaches to community assembly, little attention has been given to mammalian herbivores and their effects on trait distribution patterns. Large herbivores can play a key role in structuring communities, affecting community assembly though their role as consumers, depositors of metabolic wastes and as agents of disturbance. This study analyzes the effect of a native, reintroduced herbivore on taxonomic and functional trait distributions using a 20-year-old exclosure experiment, stratified across a heterogeneous coastal ecosystem. I found that herbivores can alter the taxonomic diversity, functional composition (CWMs) and functional diversity (FDis) of plant communities, and that their influence may be mediated by the local environmental conditions (soil formation). Importantly, we found significant changes in functional diversity due to elk shifting the dominance of plant species across the landscape even though elk had no influence on species richness. Specifically, I found that elk altered the functional diversity of these plant communities by shifting functional strategies from a stress avoidant strategy to a more resource acquisitive strategy and by deterministically changing functional diversity patterns. -

“Colour Polymorphism and Its Function in Hippolyte Obliquimanus
UNIVERSIDADE DE SÃO PAULO FFCLRP – DEPARTAMENTO DE BIOLOGIA PROGRAMA DE PÓS-GRADUAÇÃO EM BIOLOGIA COMPARADA “Colour polymorphism and its function in Hippolyte obliquimanus: camouflage and resource use diversification” “Polimorfismo de cor e sua função em Hippolyte obliquimanus: camuflagem e diversificação no uso de recursos” Rafael Campos Duarte Tese apresentada à Faculdade de Filosofia, Ciências e Letras de Ribeirão Preto da USP, como parte das exigências para a obtenção do título de Doutor em Ciências, Área: Biologia Comparada. RIBEIRÃO PRETO – SP 2017 UNIVERSIDADE DE SÃO PAULO FFCLRP – DEPARTAMENTO DE BIOLOGIA PROGRAMA DE PÓS-GRADUAÇÃO EM BIOLOGIA COMPARADA “Colour polymorphism and its function in Hippolyte obliquimanus: camouflage and resource use diversification” “Polimorfismo de cor e sua função em Hippolyte obliquimanus: camuflagem e diversificação no uso de recursos” Rafael Campos Duarte Orientador: Prof. Dr. Augusto Alberto Valero Flores Tese apresentada à Faculdade de Filosofia, Ciências e Letras de Ribeirão Preto da USP, como parte das exigências para a obtenção do título de Doutor em Ciências, Área: Biologia Comparada. RIBEIRÃO PRETO – SP 2017 Ficha catalográfica Duarte, Rafael Campos Colour polymorphism and its function in Hippolyte obliquimanus: camouflage and resource use diversification, 2017. 124 p. : il. ; 30 cm Tese apresentada à Faculdade de Filosofia, Ciências e Letras de Ribeirão Preto da USP, como parte das exigências para a obtenção do título de Doutor em Ciências, Área: Biologia Comparada. Orientador: Flores, Augusto Alberto Valero 1. Colour change. 2. Camouflage. 3. Habitat use. 4. Visual models. 5. Stable isotopes. 6. Trophic niche. “I may not have gone where I intended to go, but I think I have ended up where I needed to be.” Douglas Adams i ii SUMMARY OF CONTENTS ACKNOWLEDGEMENTS................................................................................................................ -

Limiting Similarity, Species Packing, and the Shape of Competition Kernels
Journal of Theoretical Biology 339 (2013) 3–13 Contents lists available at ScienceDirect Journal of Theoretical Biology journal homepage: www.elsevier.com/locate/yjtbi Limiting similarity, species packing, and the shape of competition kernels Olof Leimar a,n, Akira Sasaki b,c, Michael Doebeli d, Ulf Dieckmann c a Department of Zoology, Stockholm University, 106 91 Stockholm, Sweden b Department of Evolutionary Studies of Biosystems, The Graduate University for Advanced Studies (Sokendai), Hayama, Kanagawa 240-0193, Japan c Evolution and Ecology Program, International Institute for Applied Systems Analysis, Schlossplatz 1, A-2361 Laxenburg, Austria d Department of Zoology and Department of Mathematics, University of British Columbia, 6270 University Boulevard, Vancouver, BC, Canada article info abstract Available online 13 August 2013 A traditional question in community ecology is whether species’ traits are distributed as more-or-less fi Keywords: regularly spaced clusters. Interspeci c competition has been suggested to play a role in such structuring Community ecology of communities. The seminal theoretical work on limiting similarity and species packing, presented four Resource competition decades ago by Robert MacArthur, Richard Levins and Robert May, has recently been extended. There is Apparent competition now a deeper understanding of how competitive interactions influence community structure, for Pattern formation instance, how the shape of competition kernels can determine the clustering of species’ traits. Fourier analysis Competition is typically weaker for greater phenotypic difference, and the shape of the dependence defines a competition kernel. The clustering tendencies of kernels interact with other effects, such as variation in resource availability along a niche axis, but the kernel shape can have a decisive influence on community structure. -
Niche Overlap
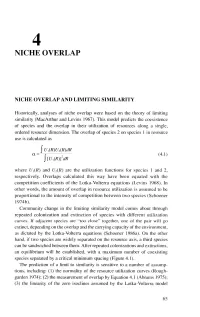
NICHE OVERLAP NICHE OVERLAP AND LIMITING SIMILARITY Historically, analyses of niche overlap were based on the theory of limiting similarity (MacArthur and Levins 1967). This model predicts the coexistence of species and the overlap in their utilization of resources along a single, ordered resource dimension. The overlap of species 2 on species 1 in resource use is calculated as where UI(R)and U2(R)are the utilization functions for species 1 and 2, respectively. Overlaps calculated this way have been equated with the competition coefficients of the Lotka-Volterra equations (Levins 1968). In other words, the amount of overlap in resource utilization is assumed to be proportional to the intensity of competition between two species (Schoener 1974b). Community change in the limiting similarity model comes about through repeated colonization and extinction of species with different utilization curves. If adjacent species are "too close" together, one of the pair will go extinct, depending on the overlap and the carrying capacity of the environment, as dictated by the Lotka-Volterra equations (Schoener 1986a). On the other hand, if two species are widely separated on the resource axis, a third species can be sandwiched between them. After repeated colonizations and extinctions, an equilibrium will be established, with a maximum number of coexisting species separated by a critical minimum spacing (Figure 4.1). The prediction of a limit to similarity is sensitive to a number of assump- tions, including: (1) the normality of the resource utilization curves (Rough- garden 1974); (2) the measurement of overlap by Equation 4.1 (Abrams 1975); (3) the linearity of the zero isoclines assumed by the Lotka-Volterra model Resource dtrnens~on Figure 4.1. -

Disturbance-Generated Niche-Segregation in a Structured Metapopulation Model
Evolutionary Ecology Research, 2009, 11: 651–666 Disturbance-generated niche-segregation in a structured metapopulation model Kalle Parvinen1 and Géza Meszéna2 1Department of Mathematics, University of Turku, Turku, Finland and 2Department of Biological Physics, Eötvös University, Budapest, Hungary ABSTRACT Question: Does limiting similarity apply for co-existence maintained by disturbance in a metapopulation? Methods: In contrast to patch occupancy modelling, we follow both local- and meta- population-scale dynamics explicitly. The theory of structured metapopulations is used for this purpose. Adaptive dynamics is employed to study evolution. Key assumptions: Local catastrophes at a given rate. Fixed dispersal rate, trade-off between fecundity and local competitiveness. Results: Co-existence of a few (up to 5) but not more species is observed. They are distinctly different along the trade-off variable and partition the patch-age axis. A series of evolutionary branchings leads to an evolutionarily stable coalition. Conclusions: The usual niche theoretical picture of decreased competition with increased differentiation applies. The patch age is the proper niche axis. Niche differentiation along this axis is the requirement of co-existence. Constraints of co-existence are overlooked in patch occupancy models. Keywords: disturbance, diversity, metapopulation, niche. INTRODUCTION Maintenance of species diversity via disturbance (Connell, 1978; Huston, 1979, 1994; Hastings, 1980) is a central issue of ecology. In the most commonly considered case, it is assumed that the ability to colonize and/or exploit an empty habitat can be increased at the cost of decreasing local competitiveness. In a constant environment, the better competitors (the ‘K-strategists’) outcompete the good colonizers/exploiters (the ‘r-strategists’) in each habitat, so that the latter disappear.