Comparisons of Cloud Cover Estimates and Cloud Fraction Profiles from ARM's Cloud-Detecting Instruments and GOES-8 Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Weather and Climate: Changing Human Exposures K
CHAPTER 2 Weather and climate: changing human exposures K. L. Ebi,1 L. O. Mearns,2 B. Nyenzi3 Introduction Research on the potential health effects of weather, climate variability and climate change requires understanding of the exposure of interest. Although often the terms weather and climate are used interchangeably, they actually represent different parts of the same spectrum. Weather is the complex and continuously changing condition of the atmosphere usually considered on a time-scale from minutes to weeks. The atmospheric variables that characterize weather include temperature, precipitation, humidity, pressure, and wind speed and direction. Climate is the average state of the atmosphere, and the associated characteristics of the underlying land or water, in a particular region over a par- ticular time-scale, usually considered over multiple years. Climate variability is the variation around the average climate, including seasonal variations as well as large-scale variations in atmospheric and ocean circulation such as the El Niño/Southern Oscillation (ENSO) or the North Atlantic Oscillation (NAO). Climate change operates over decades or longer time-scales. Research on the health impacts of climate variability and change aims to increase understanding of the potential risks and to identify effective adaptation options. Understanding the potential health consequences of climate change requires the development of empirical knowledge in three areas (1): 1. historical analogue studies to estimate, for specified populations, the risks of climate-sensitive diseases (including understanding the mechanism of effect) and to forecast the potential health effects of comparable exposures either in different geographical regions or in the future; 2. studies seeking early evidence of changes, in either health risk indicators or health status, occurring in response to actual climate change; 3. -

Articles from Bon, Inorganic Aerosol and Sea Salt
Atmos. Chem. Phys., 18, 6585–6599, 2018 https://doi.org/10.5194/acp-18-6585-2018 © Author(s) 2018. This work is distributed under the Creative Commons Attribution 3.0 License. Meteorological controls on atmospheric particulate pollution during hazard reduction burns Giovanni Di Virgilio1, Melissa Anne Hart1,2, and Ningbo Jiang3 1Climate Change Research Centre, University of New South Wales, Sydney, 2052, Australia 2Australian Research Council Centre of Excellence for Climate System Science, University of New South Wales, Sydney, 2052, Australia 3New South Wales Office of Environment and Heritage, Sydney, 2000, Australia Correspondence: Giovanni Di Virgilio ([email protected]) Received: 22 May 2017 – Discussion started: 28 September 2017 Revised: 22 January 2018 – Accepted: 21 March 2018 – Published: 8 May 2018 Abstract. Internationally, severe wildfires are an escalating build-up of PM2:5. These findings indicate that air pollution problem likely to worsen given projected changes to climate. impacts may be reduced by altering the timing of HRBs by Hazard reduction burns (HRBs) are used to suppress wild- conducting them later in the morning (by a matter of hours). fire occurrences, but they generate considerable emissions Our findings support location-specific forecasts of the air of atmospheric fine particulate matter, which depend upon quality impacts of HRBs in Sydney and similar regions else- prevailing atmospheric conditions, and can degrade air qual- where. ity. Our objectives are to improve understanding of the re- lationships between meteorological conditions and air qual- ity during HRBs in Sydney, Australia. We identify the pri- mary meteorological covariates linked to high PM2:5 pollu- 1 Introduction tion (particulates < 2.5 µm in diameter) and quantify differ- ences in their behaviours between HRB days when PM2:5 re- Many regions experience regular wildfires with the poten- mained low versus HRB days when PM2:5 was high. -

Quantifying the Impact of Synoptic Weather Types and Patterns On
1 Quantifying the impact of synoptic weather types and patterns 2 on energy fluxes of a marginal snowpack 3 Andrew Schwartz1, Hamish McGowan1, Alison Theobald2, Nik Callow3 4 1Atmospheric Observations Research Group, University of Queensland, Brisbane, 4072, Australia 5 2Department of Environment and Science, Queensland Government, Brisbane, 4000, Australia 6 3School of Agriculture and Environment, University of Western Australia, Perth, 6009, Australia 7 8 Correspondence to: Andrew J. Schwartz ([email protected]) 9 10 Abstract. 11 Synoptic weather patterns are investigated for their impact on energy fluxes driving melt of a marginal snowpack 12 in the Snowy Mountains, southeast Australia. K-means clustering applied to ECMWF ERA-Interim data identified 13 common synoptic types and patterns that were then associated with in-situ snowpack energy flux measurements. 14 The analysis showed that the largest contribution of energy to the snowpack occurred immediately prior to the 15 passage of cold fronts through increased sensible heat flux as a result of warm air advection (WAA) ahead of the 16 front. Shortwave radiation was found to be the dominant control on positive energy fluxes when individual 17 synoptic weather types were examined. As a result, cloud cover related to each synoptic type was shown to be 18 highly influential on the energy fluxes to the snowpack through its reduction of shortwave radiation and 19 reflection/emission of longwave fluxes. As single-site energy balance measurements of the snowpack were used 20 for this study, caution should be exercised before applying the results to the broader Australian Alps region. 21 However, this research is an important step towards understanding changes in surface energy flux as a result of 22 shifts to the global atmospheric circulation as anthropogenic climate change continues to impact marginal winter 23 snowpacks. -
CLOUD FRACTION: CAN IT BE DEFINED and MEASURED? and IF WE KNEW IT WOULD IT BE of ANY USE to US? Stephen E
CLOUD FRACTION: CAN IT BE DEFINED AND MEASURED? AND IF WE KNEW IT WOULD IT BE OF ANY USE TO US? Stephen E. Schwartz Upton NY USA Cloud Properties, Observations, and their Uncertainties www.bnl.gov/envsci/schwartz CLOUD FRACTION: CAN IT BE DEFINED AND MEASURED? AND IF WE KNEW IT WOULD IT BE OF ANY USE TO US? CONCLUSIONS No. No. No. I come to bury cloud fraction, not to praise it. - Shakespeare, 1599 WHAT IS A CLOUD? AMS Glossary of Meteorology (2000) A visible aggregate of minute water droplets and/or ice particles in the atmosphere above the earth’s surface. Total cloud cover: Fraction of the sky hidden by all visible clouds. Clothiaux, Barker, & Korolev (2005) Surprisingly, and in spite of the fact that we deal with clouds on a daily basis, to date there is no universal definition of a cloud. Ultimately, the definition of a cloud depends on the threshold sensitivity of the instruments used. Ramanathan, JGR (ERBE, 1988) Cloud cover is a loosely defined term. Potter Stewart (U.S. Supreme Court, 1964) I shall not today attempt further to define it, but I know it when I see it. WHY DO WE WANT TO KNOW CLOUD FRACTION, ANYWAY? Clouds have a strong impact on Earth’s radiation budget: -45 W m-2 shortwave; +30 W m-2 longwave. Slight change in cloud fraction could augment or offset greenhouse gas induced warming – cloud feedbacks. Getting cloud fraction “right” is an evaluation criterion for global climate models. Domain Observations Cloud cover Millions % Land 116 52.4 Ocean 43.3 64.8 Global 159 61.2 Warren, Hahn, London, Chervin, Jenne CLOUD FRACTION BY MULTIPLE METHODS 2 Surface, 3 satellite methods at U.S. -
Print Key. (Pdf)
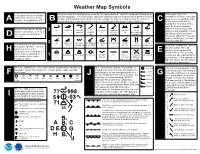
Weather Map Symbols Along the center, the cloud types are indicated. The top symbol is the high-level cloud type followed by the At the upper right is the In the upper left, the temperature mid-level cloud type. The lowest symbol represents low-level cloud over a number which tells the height of atmospheric pressure reduced to is plotted in Fahrenheit. In this the base of that cloud (in hundreds of feet) In this example, the high level cloud is Cirrus, the mid-level mean sea level in millibars (mb) A example, the temperature is 77°F. B C C to the nearest tenth with the cloud is Altocumulus and the low-level clouds is a cumulonimbus with a base height of 2000 feet. leading 9 or 10 omitted. In this case the pressure would be 999.8 mb. If the pressure was On the second row, the far-left Ci Dense Ci Ci 3 Dense Ci Cs below Cs above Overcast Cs not Cc plotted as 024 it would be 1002.4 number is the visibility in miles. In from Cb invading 45° 45°; not Cs ovcercast; not this example, the visibility is sky overcast increasing mb. When trying to determine D whether to add a 9 or 10 use the five miles. number that will give you a value closest to 1000 mb. 2 As Dense As Ac; semi- Ac Standing Ac invading Ac from Cu Ac with Ac Ac of The number at the lower left is the a/o Ns transparent Lenticularis sky As / Ns congestus chaotic sky Next to the visibility is the present dew point temperature. -

Composite VORTEX2 Supercell Environments from Near-Storm Soundings
508 MONTHLY WEATHER REVIEW VOLUME 142 Composite VORTEX2 Supercell Environments from Near-Storm Soundings MATTHEW D. PARKER Department of Marine, Earth, and Atmospheric Sciences, North Carolina State University, Raleigh, North Carolina (Manuscript received 23 May 2013, in final form 29 August 2013) ABSTRACT Three-dimensional composite analyses using 134 soundings from the second Verification of the Origins of Rotation in Tornadoes Experiment (VORTEX2) reveal the nature of near-storm variability in the envi- ronments of supercell thunderstorms. Based upon the full analysis, it appears that vertical wind shear in- creases as one approaches a supercell within the inflow sector, providing favorable conditions for supercell maintenance (and possibly tornado formation) despite small amounts of low-level cooling near the storm. The seven analyzed tornadic supercells have a composite environment that is clearly more impressive (in terms of widely used metrics) than that of the five analyzed nontornadic supercells, including more convective available potential energy (CAPE), more vertical wind shear, higher boundary layer relative humidity, and lower tropospheric horizontal vorticity that is more streamwise in the near-storm inflow. The widely used supercell composite parameter (SCP) and significant tornado parameter (STP) summarize these differences well. Comparison of composite environments from early versus late in supercells’ lifetimes reveals only subtle signs of storm-induced environmental modification, but potentially important changes associated with the evening transition toward a cooler and moister boundary layer with enhanced low-level vertical shear. Finally, although this study focused primarily on the composite inflow environment, it is intriguing that the outflows sampled by VORTEX2 soundings were surprisingly shallow (generally #500 m deep) and retained consid- 2 erable CAPE (generally $1000 J kg 1). -

Using GOES Imagery on AWIPS to Determine Cloud Cover and Snow Cover Kevin J
Using GOES imagery on AWIPS to determine cloud cover and snow cover Kevin J. Schrab WRSSD This TAlite will show how AWIPS can be used to determine cloud cover and snow cover. A 4panel image of VIS, IR, fog/refl/IR, and fog/refl from 18z on 18 Feb 2000 shows many interesting features. The VIS clearly depicts bare ground (Snake River plain and western Utah, for example). However, over much of the area it is difficult to distinguish between snow cover and cloud cover. This determination will obviously have a big impact on the public and aviation forecasts. The IR imagery (upper right panel) is not much help in differentiating snow cover from clouds. The fog/reflectivity product (lower right panel) clearly shows water clouds (white areas) over SE Montana, much of Wyoming, E Idaho, and NE Utah. The areas that are white in the VIS imagery and dark in the fog/reflectivity product imagery are snow cover (much of NE Montana, central Montana, portions of W Wyoming, and central Idaho). Fading between the VIS and fog/reflectivity product (toggle on AWIPS) clearly defines the cloud covered areas. Of course, we do not know if the water clouds identified by the fog/reflectivty product are fog or stratus. So, surface observations are important to determine the cloud type. At 18Z we see that some of the small cloud patches are fog and some are stratus. It is also interesting to note that some of the METARs show cloud cover, yet the cloud cover is just a small patch of clouds near the METAR site and that surrounding areas are clear. -

Intense Cold Wave of February 2011 Mike Hardiman, Forecaster, National Weather Service El Paso, TX / Santa Teresa, NM
Intense Cold Wave of February 2011 Mike Hardiman, Forecaster, National Weather Service El Paso, TX / Santa Teresa, NM Synopsis On Tuesday, February 1st, 2011, an intense arctic air mass moved into southern New Mexico and Far West Texas, while an upper-level trough moved in from the north. The system brought locally heavy snowfall to portions of the area on the night of Feb 1st and into the afternoon of the 2nd, and was followed by several days of sub-freezing temperatures. Temperatures in El Paso rose no higher than the upper 10s (°F) on February 2nd and 3rd. The prolonged cold weather caused widespread failures of infrastructure. Water and Gas utilities suffered from broken pipes and mains, with water leaks flooding several homes. At El Paso Electric, all eight primary power generators failed due to freezing conditions. While energy was brought into the area from elsewhere on the grid, rolling blackouts were implemented during peak electric use hours. Even as temperatures warmed up, water shortages continued to affect the El Paso and Sunland Park areas, as failed pumps caused reservoirs to quickly dry up. Meteorological Summary On Sunday, January 30th, a strong and sharply-defined upper level high pressure ridge was building across western Canada into the Arctic Ocean [Figure 1]. Northerly flow to the east of the Ridge allowed cold air from the polar regions to begin flowing south into the Yukon and Northwest Territories. By the next morning, temperatures in the -30 and -40s (°F) were common across northern Alberta and Saskatchewan, under a strengthening 1048 millibar (mb) surface high. -

An Empirical Note on Weather Effects in the Australian Stock Market
An empirical note on weather effects in the Australian stock market Author Worthington, Andrew Published 2009 Journal Title Economic Papers DOI https://doi.org/10.1111/j.1759-3441.2009.00014.x Copyright Statement © 2009 The Economic Society of Australia. Published by Blackwell Publishing. This is the pre-peer reviewed version of the following article: Economic Papers Vol. 28, No. 2, June, 2009, 148–154 which has been published in final form at http://dx.doi.org/10.1111/ j.1759-3441.2009.00014.x Downloaded from http://hdl.handle.net/10072/30698 Link to published version http://www.interscience.wiley.com/jpages/0812-0439 Griffith Research Online https://research-repository.griffith.edu.au AN EMPIRICAL NOTE ON WEATHER EFFECTS IN THE AUSTRALIAN STOCK MARKET ABSTRACT The behavioural finance literature posits a link between the weather and equity markets via investor moods. This paper examines the impact of weather on the Australian stock market over the period 1958 to 2005. A regression-based approach is employed where daily market returns on the Australian Securities Exchange’s All Ordinaries price index are regressed against eight daily weather observations (precipitation, evaporation, relative humidity, maximum and minimum temperature, hours of bright sunshine, and the speed and direction of the maximum wind gust) at Sydney’s Observatory Hill and Airport meteorological stations. Consistent with studies elsewhere including the Australian market, the results indicate that the weather has absolutely no influence on market returns. Some directions for future research that may help address some of the deficiencies found in this intriguing body of work are provided. -

A High-Quality Monthly Total Cloud Amount Dataset for Australia
Climatic Change (2011) 108:485–517 DOI 10.1007/s10584-010-9992-5 A high-quality monthly total cloud amount dataset for Australia Branislava Jovanovic · Dean Collins · Karl Braganza · Doerte Jakob · David A. Jones Received: 11 May 2009 / Accepted: 5 November 2010 / Published online: 16 December 2010 © The Author(s) 2010. This article is published with open access at Springerlink.com Abstract A high-quality monthly total cloud amount dataset for 165 stations has been developed for monitoring and assessing long-term trends in cloud cover over Australia. The dataset is based on visual 9 a.m. and 3 p.m. observations of total cloud amount, with most records starting around 1957. The quality control process involved examination of historical station metadata, together with an objective statistical test comparing candidate and reference cloud series. Individual cloud series were also compared against rainfall and diurnal temperature range series from the same site, and individual cloud series from neighboring sites. Adjustments for inhomogeneities caused by relocations and changes in observers were applied, as well as adjustments for biases caused by the shift to daylight saving time in the summer months. Analysis of these data reveals that the Australian mean annual total cloud amount is characterised by high year-to-year variability and shows a weak, statistically non-significant increase over the 1957–2007 period. A more pronounced, but also non-significant, decrease from 1977 to 2007 is evident. A strong positive correlation is found between all-Australian averages of cloud amount and rainfall, while a strong negative correlation is found between mean cloud amount and diurnal temperature range. -
Analyzing the Probability of Acquiring Cloud-Free Imagery in China with AVHRR Cloud Mask Data
atmosphere Article Analyzing the Probability of Acquiring Cloud-Free Imagery in China with AVHRR Cloud Mask Data Yingjie Wu 1 , Shibo Fang 1,2,*, Yi Xu 3, Lei Wang 1, Xuan Li 1, Zhifang Pei 1 and Dong Wu 1 1 State Key Laboratory of Sever Weather, Chinese Academy of Meteorological Sciences, Beijing 100081, China; [email protected] (Y.W.); [email protected] (L.W.); [email protected] (X.L.); [email protected] (Z.P.); [email protected] (D.W.) 2 Collaborative Innovation Center on Forecast and Evaluation of Meteorological Disasters, Nanjing University of Information Science & Technology, Nanjing 210044, China 3 Key Laboratory for Geo-Environmental Monitoring of Coastal Zone of the Ministry of Natural Resources & Guangdong Key Laboratory of Urban Informatics, Shenzhen University, Shenzhen 518060, China; [email protected] * Correspondence: [email protected] Abstract: Optical remote sensing data are used widely in many fields (such as agriculture, resource management and the environment), especially for the vast territory of China; however, the application of these data is usually limited by clouds. Although it is valuable to analyze the probability of acquiring cloud-free imagery (PACI), PACI using different sensors at the pixel level across China has not been reported. In this study, the PACI of China was calculated with daily Advanced Very High Resolution Radiometer (AVHRR) cloud mask data from 1990 to 2019. The results showed that (1) PACI varies dramatically in different regions and months in China. The value was larger in autumn and winter, and the largest figure reached 49.55% in October in Inner Mongolia (NM). -

Cloud Protocols W Elcome
Cloud Protocols W elcome Purpose Geography To observe the type and cover of clouds includ- The nature and extent of cloud cover ing contrails affects the characteristics of the physical geographic system. Overview Scientific Inquiry Abilities Students observe which of ten types of clouds Intr Use a Cloud Chart to classify cloud types. and how many of three types of contrails are visible and how much of the sky is covered by Estimate cloud cover. oduction clouds (other than contrails) and how much is Identify answerable questions. covered by contrails. Design and conduct scientific investigations. Student Outcomes Use appropriate mathematics to analyze Students learn how to make estimates from data. observations and how to categorize specific Develop descriptions and predictions clouds following general descriptions for the using evidence. categories. Recognize and analyze alternative explanations. Pr Students learn the meteorological concepts Communicate procedures, descriptions, otocols of cloud heights, types, and cloud cover and and predictions. learn the ten basic cloud types. Science Concepts Time 10 minutes Earth and Space Science Weather can be described by qualitative Level observations. All Weather changes from day to day and L earning A earning over the seasons. Frequency Weather varies on local, regional, and Daily within one hour of local solar noon global spatial scales. Clouds form by condensation of water In support of ozone and aerosol measure- vapor in the atmosphere. ments ctivities Clouds affect weather and climate. At the time of a satellite overpass The atmosphere has different properties Additional times are welcome. at different altitudes. Water vapor is added to the atmosphere Materials and Tools by evaporation from Earth’s surface and Atmosphere Investigation Data Sheet or transpiration from plants.