Vibrations Analysis of Vertical Axis Wind Turbine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wind Energy Shipping and Logistics Is a Complex SCM Discipline As Each Wind Farm Project Requires Tailor-Made Solutions
Poulsen, T., Rytter, N.G.M., Chen, G.: Global Wind Turbine Shipping & Logistics – A Research Area of the Future?, conference proceedings International Conference on Logistics and Maritime Systems (LogMS), September 12-14, 2013, Singapore, www.logms2013.org [中文]全球风电物流——一个新兴的研究领域?作者托马斯.鲍尔森,尼尔斯.吕特, 陈刚,发表于 2013 年世界物流与海运系统大会,2013 年 9 月 12 日至 14 日于新加坡 1 GLOBAL WIND TURBINE SHIPPING & LOGISTICS - A RESEARCH AREA OF THE FUTURE? Thomas Poulsen, Gang Chen, and Niels G. M. Rytter Respectively Research Assistant, Assistant Professor, and Associate Professor at Aalborg University, Copenhagen campus, Department of Mechanical and Manufacturing Engineering, A.C. Meyers Vænge 15, 2450 Copenhagen SV, Denmark, emails respectively [email protected], [email protected], and [email protected] ABSTRACT This paper investigates shipping and logistics challenges of the rapidly growing wind turbine industry using an end-to-end supply chain perspective. Wind turbine supply chains execute activities related to inbound logistics, wind turbine production/assembly, outbound logistics, installation, operations/maintenance of active wind farms, and de-commissioning. Such activities are often spread out across countries or regions, and require long-distance transportation of parts, components, or modules. Wind turbines are growing in size and weight, requiring specialized equipment and handling. Each onshore or offshore wind farm project requires tailor-made shipping and logistics solutions as installation sites are unique. Wind turbine manufacturers and/or utility companies owning the wind farms therefore face several practical challenges regarding shipping and logistics activities which also make up significant costs for them while simultaneously posing an increasingly attractive revenue opportunity for shipping and logistics service companies. -

Splendid Prospects
WIND ENERGY The Iberian Peninsula has many excellent wind power locations. More and more wind farms are springing up in Spain and Portugal. Photos (3): Jan Oelker Splendid prospects The worldwide use of wind power is developing strongly. Unlimited opportunities in North America More and more markets are opening up, so that the boom In the USA the »Production Tax Credit«, PTC, is the driv- is not dependent on just a few countries. North America ing force. Unfortunately, for many years the US govern- ment didn’t feel able to grant the PTC on a long-term and Asia are growing in importance, but Europe will stay basis. Again and again there were interruptions to this support mechanism, so that the market was affected by dominant for the time being. a »yo-yo effect«, which was a problem for manufactur- ers (see diagram). There was a regular up and down on the US market. The manufacturer GE Energy, which is especially dependent on the US market, felt the effects particularly strongly, and the turnover dropped dramat- ll renewable energies are currently being expand- ically in 2004 (see table 2). ed strongly, but wind power is growing the Now, however, the situation seems to be calming fastest. The reasons are clear: The technology is down. In September 2005 the US government extend- mature, the costs per kilowatt hour are relative- ed the PTC until the end of 2007. This provided an ac- ly low and construction takes very little time. ceptable amount of security for investments and the Many governments are trying to reduce their depen- market has grown steadily since then. -

For Wind Farms
Technology & Technical Issues in Renewable Project Development Bruce Bailey, President AWS Truewind, LLC 255 Fuller Road Albany, NY 12203 [email protected] 1 Who is AWS Truewind z Industry Leader & Consultant for 5,000+ MW z Wind Energy Assessment, Engineering, Due Diligence, Forecasting/Scheduling • Experience in 40+ Countries • Established in 1983; 40 Employees 2 Technology & Technical Issues z Technology & Cost Trends z Defining Resources z Siting Tools z Project Development Steps z Challenges & Uncertainties z Conclusions 3 Annual Average Growth of Energy Technologies in the ‘90s 30 Wind 25 Solar PV 25.7* Geothermal 20 Nat. Gas 15 Hydro 16.8 Oil 10 Coal 3.0 5 2.1 Nuclear 1.6 1.4 1.2 0.6 Source: REPP, 0 Worldwatch 4 Costs of Energy from Different Energy Technologies 25 20 RenewableRenewable Options:Options: Conventional Options: 15 Costs don’t include externalities ¢10 kWh per 5 0 WindWind SmallSmall FuelFuel BioBio SolarSolar SolarSolar CoalCoal GTGT CCCC SCSC NuclearNuclear HydroHydro CellCell MassMass ThermalThermal PVPV Sources: BTM Consult, WindPower Monthly, GE Wind Energy Biomass : Direct fueled 5 20+ Years of Wind Technology Growth 1981 1985 1990 1996 1999 2004 Rotor (Meter) 10 17 27 40 50 77 KW 25 100 225 550 $750 1,500 Cost/kW $2,600 $1,650 $1,333¢ per $1,050kWh $950 $800 MWh 45 220 550 1,480 2,200 5,600 Bottom Line: 1981-1999 = 49x the power, 11x the cost; 1999-2004 = 2.6x the power, 1.8x the cost 6 U.S. Wind Potential is Large, But… Best Resources are Often Distant from Load Centers 7 Basic Qualities of Wind Project Sites z Strong Winds » Minimum Class 4 desired (>7 m/s @ hub height) for wind farms z Transmission Access » distance, voltage, excess capacity z Good Permitting Chances » land use compatibility » public acceptance » visual, noise, and bird/bat impacts z Adequate Land Area » economies of scale with larger project size » multiple landowners Crop of the 21st Century? 8 Siting Tools z Wind Maps & Other Regional Resource Data z Topographic Maps Old vs. -

Repower Systems AG Corporate Presentation
REpower Systems AG Corporate Presentation September 2009 “Of all the forces of nature, I should think the wind contains the largest amount of motive power – that is, power to move things.” …… Abraham Lincoln (1859) “We will harness the sun and the winds and the soil to fuel our cars and run our factories […] All this we can do. And all this we will do.” …… Barack Obama (2009) 2 There are four good reasons for the growth of renewable energies. Scarce resources Import dependency RENEWABLERENEWABLE Climatic change ENERGIESENERGIES Growing energy demand 3 Agenda At a glance Market Company Technology Projects Financials & Outlook 4 Fiscal year 2008/09 at a glance. ExpansionExpansion InnovationsInnovations OffshoreOffshore milestonesmilestones ofof capacitiescapacities StartStart ofof 5M5M serialserial ProductProduct launchlaunch ofof upgradedupgraded ConstructionConstruction startstart ofof newnew productionproduction inin thethe newnew offshoreoffshore turbineturbine REpowerREpower R&DR&D CentreCentre offshoreoffshore manufacturingmanufacturing andand 6M6M (Osterrönfeld, Germany) (Osterrönfeld, Germany) logisticslogistics centrecentre ProductProduct launchlaunch ofof newnew StartStart ofof rotorrotor bladeblade CompletionCompletion ofof firstfirst fullyfully onshoreonshore turbineturbine REpowerREpower productionproduction inin thethe newnew rotorrotor approvedapproved BelgiumBelgium offshoreoffshore 3.XM3.XM bladeblade facilityfacility windwind farmfarm „Thornton„Thornton Bank“Bank“ StartStart ofof serialserial productionproduction ofof FrameworkFramework -

Wind Force 10
WIND FORCE 10 A BLUEPRINT TO ACHIEVE 10% OF THE W O R L D’S ELECTRICITY FROM WIND POWER BY 2020 Wind power today is a success story supplying electricity to millions of people, employing tens of thousands of people and generating billions of dollars revenue. The pace of change and progress has been rapid for such a young industry. The benefits of wind power are compelling; environmental protection, economic growth job creation, diversity of supply, rapid deployment, technology transfer and innovation. The fuel is free, abundant and inexhaustible. Yet these benefits remain largely untapped; most energy decisions taken today overlook wind power, and it faces many obstacles and barriers. On climate change, an emerging international consensus states that business-as- usual is not an option, that the world must move into a clean energy economy. And some argue that tackling climate change is too daunting a challenge, that change is somehow too costly for economies and industry. In this battleground for solutions, wind power is a premier choice to help counter deadlock and delay – an affordable, feasible, mainstream global power force that is able to substitute for fossil fuels. We have produced this rep o r t in order to update our understanding of the contribution that wind power can make to the world – it is deliberately conserva t i v e . The rep o r t is a practical blueprint to show that wind power is capable of supplying 10% of the world’s electricity within two decades, even if we double our overall electricity use in that time. -

Wind Energy Overview
An overview of Wind Power development in the Midwest Douglas J. Reinemann, Ph.D. Professor of Biological Systems Engineering University of Wisconsin – Madison Wind is one of the fastest growing Renewable energy sources in the world Annual Wind Turbine Installations Worldwide (MW) 6,000 6,000 Worldwide installed capacity (2001): 24,000 MW (~ 12.6 million homes @ 5,000 kWh/home and 30% wind capacity factor) 5,000 5,000 8,100 MW Germany 3,175 MW Spain 4,240 MW U.S. 2,417 MW Denmark 4,000 4,000 MW 45,000 MW predicted by 2005 3,000 3,000 2,000 2,000 1,000 1,000 0 0 1983 1984 1985 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 Source: Danish Wind Turbine Manufacturers Association & BTM Consult 1 Windmills? Early application of wind was for grinding grain (Wind-Mill) and pumping water (Windmill?) Making Electricity Wind Turbine Wind Energy Conversion System (WECS) Components of a WECS Gearbox Tower Rotor Foundation Controls Generator Illustration Source: RETScreen International www.retscreen.net 2 Where does the wind come from? Solar heating of the earth’s surface High pressure Vs. Low pressure systems Circulation Cell patterns •Hadley Cell (trade winds) •Ferrel Cell •Polar Cell Illustration source: Renewable Energy And where does it go? Power for a Sustainable Future, G. Boyle, 2004, Oxford Press Local Winds Sea Breezes Result of the seas ability to maintain temperature Daytime land heats, sea is cool Nighttime land cools faster than sea Illustration source: Renewable Energy Power for a Sustainable Future, G. -

Pdf (Accessed 14 Sept
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by SOAS Research Online Zhou, X., Li, X., Lema, R., Urban, F., 2015. Comparing the knowledge bases of wind turbine firms in Asia and Europe: patent trajectories, networks, and globalization. Science and Public Policy, 1-16. doi: 10.1093/scipol/scv055 Comparing the knowledge bases of wind turbine firms in Asia and Europe: patent trajectories, networks, and globalisation Yuan Zhou1, Xin Li2, Rasmus Lema3, Frauke Urban4 1 School of Public Policy and Management, Tsinghua University, Beijing, China 2 School of Economics and Management, Beijing University of Technology, China 3 Department of Business and Management, Aalborg University, Denmark 4 School of Oriental and African Studies SOAS, University of London, UK Abstract This study uses patent analyses to compare the knowledge bases of leading wind turbine firms in Asia and Europe. It concentrates on the following aspects: (a) the trajectories of key technologies, (b) external knowledge networks, and (c) the globalisation of knowledge application. Our analyses suggest that the knowledge bases differ significantly between leading wind turbine firms in Europe and Asia. Europe’s leading firms have broader and deeper knowledge bases than their Asian counterparts. In contrast, Chinese lead firms, with their unidirectional knowledge networks, are highly domestic in orientation with respect to the application of new knowledge. The Indian lead firm Suzlon, however, exhibits a better knowledge position. While our quantitative analyses validate prior qualitative studies it also brings new insights. The study suggests that European firms are still leaders in this industry, and Asian lead firms are unlikely to create new pathways that will disrupt incumbents in the near future. -
Executive Summary…………………………………………….……………3 II
Policy Recommendations to Develop Offshore Wind Power in the United States Cathy Chen, Yiting Chen, Hee Jung Chung Filipp Makoveev Hye Jung Lee 12/08/2010 Table of Contents I. Executive Summary…………………………………………….……………3 II. Overview of Offshore Wind Power Industry…………………….………….4 III. Cost-Benefit Analysis………………………………………………………8 Economic Cost and Benefits…………………………………………………..9 Social Externalities …………………………………………………………. 24 IV. Policies……………………………………………………………………. 28 Chinese Renewable Energy Policies....……………………………………… 28 U.S. and E.U. Policies ………………………………………………………. 31 V. Conclusion ………………………………………………………………….36 VI. Appendices………………………………………………………………... 39 VII. References ……………………………………………………………….. 42 2 Executive Summary Over the course of the past twenty years, many countries have begun to emphasize the necessity of generating a substantial wedge of their total energy consumption from renewable resources such as solar, wind, and hydro power. This policy trend has been taking place across nations in the European Union and in East Asia, including China. Recently, the American Wind Energy Association (AWEA), in conjunction with the United States Department of Energy, put forth the “20% Wind by 2030 Scenario” report, which advocated for a policy target that hinges on 3.6%, or 54 GW, of all American electricity being generated by off-shore wind farms . Additionally, the construction of offshore farms are seen as an excellent approach to harvesting wind energy in close proximity to major metropolitan areas, most of which are situated along America's coasts. Despite the Department of Energy's policy targets and its benefits, the U.S. still lacks any operational large-scale offshore wind farms and most efforts to construct farms are limited. The cause for this lethargic growth of the offshore wind industry is the high capital costs and energy policies that do not sufficiently incentivize grid companies to guarantee a steady revenue stream post-construction. -

2014-2015 Offshore Wind Technologies Market Report
2014-2015 Offshore Wind Technologies Market Report NREL is a national laboratory of the U.S. Department of Energy, Office of Energy Efficiency and Renewable Energy, operated by the Alliance for Sustainable Energy, LLC. 2014–2015 Offshore Wind Technologies Market Report Aaron Smith, Tyler Stehly, and Walter Musial National Renewable Energy Laboratory Prepared under Task No. WE14.CG02 Link to Data Tables NREL is a national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Operated by the Alliance for Sustainable Energy, LLC This report is available at no cost from the National Renewable Energy Laboratory (NREL) at www.nrel.gov/publications. Technical Report NREL/TP-5000-64283 September 2015 This report is being disseminated by the U.S. Department of Energy (DOE). As such, this document was prepared in compliance with Section 515 of the Treasury and General Government Appropriations Act for fiscal year 2001 (public law 106-554) and information quality guidelines issued by DOE. Though this report does not constitute “influential” information, as that term is defined in DOE’s information quality guidelines or the Office of Management and Budget’s Information Quality Bulletin for Peer Review, the study was reviewed both internally and externally prior to publication. For purposes of external review, the study benefited from the advice and comments of seven wind industry and trade association representatives, nine consultants, one academic institution, and five U.S. Government employees. NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. -

Senvion Has Installed 111 Multi-Megawatt Turbines Offshore
24 September 2014 Senvion has installed 111 multi-megawatt turbines offshore Hamburg: Senvion SE, a wholly owned subsidiary of the Suzlon Group, the world’s fifth-largest* manufacturer of wind turbines, today installed its 111th offshore turbine. The company reached this milestone with the nineteenth Senvion 6.2M126 of 48 planned turbines that are currently being installed at the Nordsee Ost offshore wind farm. The additional 29 turbines for Nordsee Ost are already pre-assembled apart from the blades, so the installation can be completed in autumn. Then, Senvion will have delivered more than 800 megawatts of installed capacity offshore and will be the company with the most multi-megawatt turbines installed worldwide. With the 20 turbines installed on land, Senvion now has an offshore fleet with a total operating life of over 350 years – and can thus offer more experience than any other manufacturer. Andreas Nauen, CEO of Senvion SE, says: “We have managed to install 19 turbines for Nordsee Ost in just ten weeks. This cements our position as the strong number two in the offshore market. And we are again showing pioneer spirit: Not only are we applying another assembly method with single- blade assembly offshore, we are also installing our own PowerBlades at sea for the first time.” Senvion was the first company to bring a 5 megawatt turbine to market; the prototype was erected in 2004. The Senvion 6.2M126 is the world’s most powerful mass-produced offshore turbine. This year, Senvion will install the prototype of its newest offshore turbine: With the Senvion 6.2M152, the company is again setting standards in the cost-effective generation of offshore wind energy. -

Present and Future Wind Energy in the U.S
Present and Future Wind Energy in the U.S. Jose Zayas Manager, Wind Energy Technology Dept. Sandia National Laboratories www.sandia.gov/wind [email protected] Sandia is a multiprogram laboratory operated by Sandia Corporation, a Lockheed Martin Company, for the United States Department of Energy’s National Nuclear Security Administration under contract DE-AC04-94AL85000. History of Wind Energy pre - 1970 Prehistoric – Maritime (Greek, Viking) Medieval – Persian, Greek, England 20th Century – Great Plains First Energy Shortage -- 1974 History of Wind Energy post - 1970 U.S. DOE develops significant research program in response to the energy crisis of 1974 History of Wind Energy California Boom Installed Capacity 1400 1200 1000 Livermore, CA -1982 800 CA MW 600 rest of World 400 200 0 1980 1981 1982 1983 1984 1985 1986 1987 AWEA, CEC, Renewable Energy World, Power Engineering, Earth Policy Institute, UC-Irvine History of Wind Energy California and World Installed Capacity 80000 70000 60000 50000 40000 MW 30000 CA 20000 rest of World 10000 0 1980 1984 1988 1992 1996 2000 2004 AWEA, CEC, Renewable Energy World, Power Engineering, Earth Policy Institute, UC-Irvine Current U.S. Installation Wind Energy Today (end of 2007) • Total installed capacity: 16,879 MW (34 States) 5,244 MW installed 2007 45% increase from 2006 Accounted for 30% of new installed capacity in 2007 • Over 9 billion dollars invested in 2007 • Installed cost: ~5-8¢/kWh Installed capacity in the USA Cumulative end 2007: 16,879 MW 8,000 24,000 7,000 21,000 6,000 18,000 5,000 15,000 Almost 5.5 TW Available Resource 4,000 12,000 MW (Total U. -
Proceeding As Planned
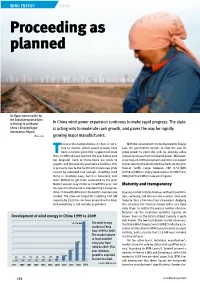
Wind EnErgy china Proceeding as planned An Uygur woman walks by the Dabancheng wind farm in Urumqi in northwest In China wind power expansion continues to make rapid progress. The state China’s Xinjiang Uygur is acting only to moderate rank growth, and paves the way for rapidly Autonomous Region. Photo: dpa growing major manufacturers. his year the market volume in China is not li- With the amendments to the Renewable Energy kely to double, which would actually have Law, the government intends to clear the way for Tbeen a miracle given that a capacity of more green power to enter the grid, by obliging utility than 13 GW had been reached the year before (see companies to purchase renewable power. More over, bar diagram). Even in China there are limits to since August 2009 wind power operators can expect growth, and the industry must take a breather. This higher rates for the electricity they feed into the grid. China Balkendiagramm Windenergie-Marktentwicklung in China 1999 -is 2009 primarily due to the fact that transmission grids Feed-in tariffs range between CNY 0.51/kWh cannot be extended fast enough. Installing wind (0.058 €/kWh) in strong wind regions to CNY 0.61/ Jahr MW 1999 44 farms is relatively easy, but it is becoming ever kWh (0.070 €/kWh) in low wind regions. 2000 76 more difficult to get them connected to the grid. 2001 56 Market volume may shrink to 10 GW this year, but 2002 68 Maturity and transparency 2003 98 because the US market is experiencing a heavy de- 2004 197 cline, China will still remain the world’s number one A young market initially develops with wild prolifera- 2005 503 2006 1337 market.