Use of Image Processing Techniques for Making Run out Decision in Cricket
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Leg Before Wicket Douglas Miller Starts to Look at the Most Controversial Form of Dismissal
Leg Before Wicket Douglas Miller starts to look at the most controversial form of dismissal Of the 40 wickets that fell in the match between Gloucestershire and Glamorgan at Cheltenham that ended on 1st August 2010 as many as 18 of the victims were dismissed lbw. Was this, I wondered, a possible world record? Asking Philip Bailey to interrogate the files of Cricket Archive, I discovered that it was not: back in 1953/54 a match between Patiala and Delhi had seen 19 batsmen lose their wickets in this way. However, until the start of the 2010 season the record in English first-class cricket had stood at 17, but, barely credibly, Cheltenham had provided the third instance of a match with 18 lbws in the course of the summer. Gloucestershire had already been involved in one of these, against Sussex at Bristol, while the third occasion was the Sussex-Middlesex match at Hove. Was this startling statistic for 2010 an indication that leg before decisions are more freely given nowadays? It seemed to correlate with an impression that modern technology has given umpires a better feel for when a ball is likely to hit the wicket and that the days when batsmen could push forward and feel safe were now over. I determined to dig deeper and examine trends over time. This article confines itself to matches played in the County Championship since World War I. I propose looking at Tests in a future issue. The table below shows how the incidence of lbw dismissals has fluctuated over time. -

Technical Interpretations
TECHNICAL INTERPRETATIONS LAW 36: LEG BEFORE WICKET There are several points that an umpire must consider when an appeal is made for LBW. The final and most important question is “would the ball have hit the stumps?” but more about that later. (1) Firstly, the delivery must not be a “no ball”. (2) The ball MUST pitch in line with the stumps or outside the off stump. Any ball pitching outside leg stump CANNOT BE OUT LBW. (3) The ball must not come off the bat or the hand holding the bat before it hits the batsman on the pads or body. (4) Where does the ball hit striker? – only the first impact is considered. Quite often the ball will hit the front pad and deflect onto the back pad. (5) If the striker was attempting to play the ball the ball must hit him in line between wicket and wicket, even if the impact is above the level of the bails. (6) If the striker was making no genuine attempt to play the ball, then the impact can be outside off stump. (7) Where would the ball have gone if not interrupted by impact on striker? (8) The ball does not always pitch before hitting the batsman. If it is a full toss the umpire MUST assume the path at impact will continue after impact. (9) The “Off” side of wicket is now clearly defined as when the batsman takes his stance and the ball comes into play – ie when the bowler starts his run up or if he has no run up, his bowling action The term “LBW” whilst meaning Leg Before Wicket also allows the batsman to be out if the ball strikes any other part of his body, even his shoulder or head! All of the above points must all be satisfied for the batsman to be out under this Law. -

Fielding Regulations Safety Guidance on the Wearing of Cricket Helmets
Youth Cricket - Fielding Regulations The ECB has regulations covering the minimum fielding distances for young players in all matches where a hard ball is used. • No young player in the Under 15 age group or younger shall be allowed to field c loser than 8 yards (7.3 metres) from the middle stump, except behind the wicket on the off side, until the batsman has pla yed at the ball. • For players in the Under 13 age group and below the distance is 11 yards (10 metres). • These minimum distances apply even if the player is wearing a helmet. • Should a young player in these age groups come within the restricted distance the umpire must stop the game immediately and instruct the fielder to move back. • In addition any young player in the Under 16 to Under 18 age groups, who has not reached the age of 18, must wear a helmet and, for boys, an abdominal protector (box) when fielding within 6 yards (5.5 metres) of the bat, except behind the wicket on the off side. • Players should wear appropriate protective equipment whenever they are fielding in a position where they feel at risk. • These fielding regulations are applicable to all cricket in England and Wales. Age groups are based on the age of the player at midnight on 31st August in the year preceding the current season. Safety Guidance on the Wearing of Cricket Helmets by Young Players The England and Wales Cricket Board (ECB) issued safety guidance on the wearing of helmets by young players up to the age of 18, the guidance recommends that: • Helmets with a faceguard or grille should be worn when batting against a hard cricket ball in matches and in practice sessions • Young players should regard a helmet with a faceguard as a normal item of protective equipment when batting, together with pads, gloves and, for boys, an abdominal protector (box) 19 • Young wicket keepers should wear a helmet with a faceguard, or a wicketkeeper face protector when standing up to the stumps. -

Intramural Sports Cricket Rules
Intramural Sports Cricket Rules NC State University Recreation uses a modified version of the Laws of Cricket as established by the Marylebone Cricket Club (MCC). The rules listed below represent the most important aspects of the game with which to be familiar. Rule I: Terminology Defined Bails – One of the (2) small pieces of wood that lie on top of the stumps to form the wicket Batsman – (2) batsmen are required to be on the field for the batting side at all times. If (2) batsmen cannot be fielded, the innings is declared over. One batsman is denoted the striking batsman while the other is declared the non-striking batsman. These titles will be shared between the (2) batsmen on the pitch, depending on which one is being bowled to currently and which is just running. a) Striking Batsman – The batsman that is facing the bowler and making contact with the ball. b) Non-Striking Batsman – The batsman that is on the same side of the pitch as the bowler and does not make contact with the ball. Bowler – The player on the fielding side who bowls to the batsman. Bowlers may only change fielding positions in between overs. No bowler may bowl more than (2) overs in an innings. Bowling Crease – The white line marked at each end of the pitch through the wicket and ending at the return creases. Destroyed Ball – A ball that has become unfit for play as declared by the umpires at any time during a match Chucking – An illegal bowling action which occurs when a bowler straightens the bowling arm when delivering the ball. -
DRS ASSISTING UMPIRE USING COMPUTER VISION Ms
International Journal of Engineering Applied Sciences and Technology, 2021 Vol. 5, Issue 11, ISSN No. 2455-2143, Pages 262-266 Published Online March 2021 in IJEAST (http://www.ijeast.com) DRS ASSISTING UMPIRE USING COMPUTER VISION Ms. Kajal Shirke, Ms. Varsha Warise, Ms. Pooja Waykule Student, Information Technology Engineering, Bharati Vidyapeeth College of Engineering, Navi Mumbai, Maharashtra, India Prof. S.N. Mhatre Assistant Professor, Dept. of Information Technology, Bharati Vidyapeeth College of Engineering, Navi Mumbai, Maharashtra, India Abstract - A fair decision is crucial in any of the game to give of the decisions. If this can be achieved with the help of technology, justice to the game. Any wrong decision due to human then the game will be more fair and enjoyable. Previously proposed misperception may fate the result of the game. Computer vision researches regarding this field have tried to solve the problem, but and Image processing techniques have been mentioned in the these are infeasible, costly and prone to error because of the usage of literature review which used multiple cameras for sensors on field and bowlers. On the other hand, we have proposed demonstration. This paper focuses on a system which helps in computer vision based approach in this paper which does not need making the decisions to assist the umpire in taking the extra infrastructure because it will get video feed from broadcasting decisions such as no-ball, LBW i.e. Leg before wicket, Run out, cameras. Our proposed method is expected to perform better and low stump out, etc with the help of smartphone camera of good cost in operating due to no infield sensor and other devices. -

1Wk Standing Up
C L O I E C K D T V I 1 O WA T C H WK STANDING UP A STANDING UP WICKET KEEPING DRILL, REPLICATING A TURNING BALL, WORKING ON SPEED BEHIND THE STUMPS EQUIPMENT & SETUP: Remove the bails in every training You will need a set of fusion stumps (or similar), a set of balls (leather cricket balls drill so it becomes second nature can be used with a Crazy Catch or we have lighter Crazy Catch Vision Balls) and a member of the Crazy Catch Classic range (Our bestselling Wildchild Classic is seen in a game - Chris Taylor in this video). The Crazy Catch net is placed in front of the stumps about 5 metres out and the adjustable bar extended fully to create a 90 degree angle. The wicket-keeper SET UP DIAGRAM: is positioned close up behind the stumps facing the Crazy Catch set on the SANE side COACH with the INSANE side therefore lying flat on the ground. For the progressions Chris uses a flexi stump set with slates to provide deflections and distractions. ACTIVITY: The coach or feeder stands just off the should of the wicket-keeper demonstrating the correct posture and starting position (see coaching points) either on the offside or leg side and feeds the ball onto the sane side of the Crazy Catch. The wicket- WICKET keeper is looking to collect the incoming ball and take the bails off quickly in one KEEPER fluid movement, ready for the next ball in. TOP TIPS: As a wicket keeper you should always look to take the bails in any drill or practice situation so it becomes second nature. -

Atlanta Cricket League 2017 Rules and Regulations for Fall Charity Knockout
Atlanta Cricket League 2017 Rules and Regulations for Fall Charity Knockout All matches will be played with the ACL approved "Hard Tennis" cricket balls that are provided by ACL. The games will be played as per the MCC Laws of Cricket with some exceptions. The exceptions and other tournament rules are as follows: 1. The tournament will be played as a knockout game. 2. Each game shall be played between two teams of 11 players each. 3. Each game shall have a maximum of TWELVE 6-ball overs per inning. 4. Minimum 5 bowlers should be used in the game. Only 2 Bowlers can bowl a maximum of 3 overs. 5. The overs shall all be bowled from one end of the pitch, as determined by the umpires. 6. There will be no LBWs. However, leg byes will be permitted as long as there is no deliberate padding by the batsman – umpires call is final. 7. Each team will be permitted to register a maximum of 15 players (15 allowed as per standard roster plus up to max 3 more players by paying $20 per player), although only 11 can bat or bowl in any one game. All 15 players should be registered and should have signed the waiver form and should not have played in any other team in this tournament. The teams should submit the playing 11 at the beginning of the match. However, a team can get individual trophy for max 15 players. 8. To play in semifinal or final, a player should have played (in playing 11) minimum 1 match in earlier rounds (QF or earlier rounds) this applies for substitute player too. -

Hawk Eye Technology Used in Cricket
ISSN 2664-4150 (Print) & ISSN 2664-794X (Online) South Asian Research Journal of Engineering and Technology Abbreviated Key Title: South Asian Res J Eng Tech | Volume-3 | Issue-2 | Mar-Apr -2021 | DOI: 10.36346/sarjet.2021.v03i02.002 Original Research Article Hawk Eye Technology Used In Cricket L M Jayalath* Faculty of Information Technology, Department of Interdisciplinary Studies, University of Moratuwa, Sri Lanka *Corresponding Author L M Jayalath Article History Received: 03.12.2020 Accepted: 15.12.2020 Published: 30.04.2021 Abstract: Game of cricket is improving day by day. Development of the sport technologies is one of the major reasons behind this improvement. Hawk Eye is one such technology which is been used in the game of cricket. Due to numerous amount of assistance given by this technology for the improvement of the quality of the game it has become very popular among the public. But due to a lees number of researches carried out on this topic the public understanding regarding the technology is very much law. Therefore this paper aims to discuss the principal behind the Hawk Eye, multiple uses of it in the game of cricket, accuracy of the system, reliability of the system while suggesting future enhancements to be done. Keywords: Hawk Eye, DRS, LBW, Wagon wheel, Pitch map, Despin, Beehive. INTRODUCTION Television broadcasting has become a very profitable business all around the world. Sport broadcasting is one area where a large amount of audience is available. As a result there is a massive competition among the broadcasting channels to become the pioneer. -

Sports Technology of the Future
Science in Sports Sports Technology of www.waikato.ac.nz the Future Shakunt Pandey September 2018 | Science Reporter | 19 HE rapid advent of technology has which W.G. Grace, Donald Bradman, Bowling machines are in demand but changed the face of sports forever Sir Garfield Sobers, Vivian Richards, or obviously they are for the advantage of T and for better. Now it’s fairer our original Little Master Sunil Gavaskar, batsmen. How about a tech that helps both and most importantly easily available to and other cricketing jewels graced. Hawk the batsmen and the bowlers? The answer one and all. The Video Assistant Referee Eye, Snickometer, Hot Spot, Stump lies in Dartfish Video Technology and this (VAR) which was successfully used in Camera, Stump Microphone, Speed Gun, will become more popular in the coming the recently concluded mega World Cup Third Umpire and the DRS are in use and days. The players can watch themselves Football Championship is the most talked have made the game more interesting, bowl and bat as it happens! about sports technology at present. captivating as well as fairer. Through Dartfish Technology the Sports has been enriched by adopting The basic equipment of cricketers cricket coach captures the video footage technology and it is now being applied is undergoing a sea change and with of the player’s stroke and delivery and to just about every aspect right from amazing new technologies coming up it works through it frame by frame as it the manufacture of sports equipments won’t be a long wait for players to use is viewed on the TV right next to the to electronic and video decision making lighter, stronger and durable cricket bats player in the centre. -
Scrapping the Pain of Wrong Decisions
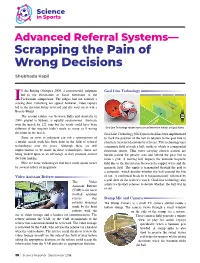
Science in Sports Advanced Referral Systems— Scrapping the Pain of Wrong Decisions Shubhada Kapil N the Beijing Olympics 2008, a controversial judgment Goal Line Technology led to the elimination of Sarah Stevenson in the ITaekwondo competition. The judges had not counted a scoring shot. Following her appeal, however, video replays led to the decision being reversed and she went on to win a Bronze Medal. The second cricket test between India and Australia in 2008, played in Sydney, is equally controversial. Australia won the match by 122 runs but the result could have been different if the umpires hadn’t made as many as 9 wrong Goal Line Technology system based around sensors in the ball and goal frame decisions in the match. Goal Line Technology (GLT) in football has been implemented Since an error in judgment can rob a sportsperson of to track the position of the ball in relation to the goal line to a medal, much work has been done in the field of referral eliminate incorrect decisions by referees. This technology uses technologies over the years. Although there are still a magnetic field to track a ball, inside of which is a suspended improvements to be made in these technologies, these are electronic sensor. Thin wires carrying electric current are being looked upon as an advantage as they promote correct buried around the penalty area and behind the goal line to decision making. form a grid. A moving ball impacts the uniform magnetic Here are some technologies that have made sports richer field due to the interference between the copper wires and the by several orders of magnitude. -

The Laws of Cricket
CHANGES TO THE LAWS OF CRICKET (With effect from 1st April 2019) OFFICIAL Marylebone Cricket Club Changes to The Laws of Cricket (With effect from 1st April 2019) 1 Changes to the Laws of In 2017, MCC published a new Code of Laws, which incorporated the most wide- Cricket – with effect from ranging and ambitious alterations to the Laws of Cricket for almost two decades. 1 April 2019 The Code has been well-received, and had a positive impact on cricket the world over. However, over the last two years, some issues have emerged, and so MCC has produced a second edition, which will come into force on 1st April 2019. The majority of these changes are simply minor corrections or clarifications, and will not make a material difference to the vast majority of cricket played around the world. One change removes a whole clause (the previous Law 41.19), but this is simply because, after changes to Law 41.2, the clause was duplication. However, there are a few significant changes. First, the decision was taken to rework Law 41.7, which relates to full-pitch deliveries over waist height (known colloquially as ‘beamers’). MCC listened to significant feedback and has handed more control to umpires to determine whether a delivery is dangerous. Also relevant to that Law, and at the behest of umpires, MCC has for the first time put into the Laws a definition of the waist – something that has long-since been a point of contention, particularly in the recreational game. There is also a slight change to Law 41.16, which should further confirm the principle, established in the 2017 Code, that it is the non-striker’s duty to remain in his/her ground until the bowler has released the ball. -

Dallas Youth Cricket League (DYCL) Twenty20 Tournament Rule Book Version 2013-03-20
Dallas Youth Cricket League (DYCL) Twenty20 Tournament Rule Book Version 2013-03-20 March, 2013 The rule book contains the rules, regulations and guidelines for the Dallas Youth Cricket league Twenty20 Tournament Dallas Youth Cricket League Table of Contents 1. 20/20 Cricket Rules in DYCL: ................................................................................................................ 3 2. Team Equipment / Gear: ..................................................................................................................... 6 3. Umpiring Guidelines: ........................................................................................................................... 6 4. Match Timings and Punctuality ............................................................................................................ 6 5. Captain’s Responsibilities: ................................................................................................................... 7 6. Code of Conduct/ Discipline /Behavior Expectations: .......................................................................... 7 7. Final Note: .......................................................................................................................................... 7 8. Disclaimer: ........................................................................................................................................... 7 2 Dallas Youth Cricket League DYCL Rule Book 1. 20/20 Cricket Rules in DYCL: 1. Game rules are in accordance with the ICC