Annex 7. Orbit Modelling and Analysis, Simulated Mission Planning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sab 2012 Mecbpn
Dos-Santos,W.A., et al. PROPOSTA DE UMA MISSÃO ESPACIAL PARA PICOSATÉLITES E ... PROPOSTA DE UMA MISSÃO ESPACIAL COMPLETA PARA PICOSATÉLITES E NANOSATÉLITES UTILIZANDO LANÇADORES NACIONAIS Walter Abrahão dos Santos, Fernanda Sayuri Yamasaki, Wilson Yamaguti Instituto Nacional de Pesquisas Espaciais – Av. dos Astronautas,1758 - CP515 - CEP 12227-010 São José dos Campos - SP, [email protected] , [email protected] , [email protected] Flávio de Azevedo Corrêa Jr. Instituto de Aeronáutica e Espaço – DCTA/IAE/SESP/PE, Praça Mal. Eduardo Gomes, 50 - Vila das Acácias, 12.228-904 - São José dos Campos - SP - Brasil - [email protected] Resumo: Devido ao mercado emergente de aplicações para pico e nanosatélites nas áreas de Espaço e Defesa, este trabalho se inspira na Missão Espacial Completa Brasileira (MECB), um programa conjunto de satélites e lançadores brasileiros, para propor um programa indutor de lançadores e plataformas voltados para satélites miniaturizados com missões sofisticadas devido a avanços em nanotecnologia e computação, entre outros. O trabalho considera dois grandes segmentos: (1) o segmento de lançadores focado na análise de viabilidade de veículos lançadores de pequenas cargas a uma altitude de aproximadamente 300 km e (2) o segmento relativo aos satélites objetivando embarcar cargas úteis com as seguintes aplicações em vista: um radiômetro, uma microcâmera e formação em voo. A análise foi basicamente concentrada nos envelopes de massa, tamanho, potência. A sustentabilidade do programa para estes satélites requer um acesso barato e regular ao espaço e é atrativa pela projeção futura deste nicho de mercado que pode contribuir com objetivos estratégicos do país. -

Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object
Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object by Nathan C. Shupe B.A., Swarthmore College, 2005 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirements for the degree of Master of Science Department of Aerospace Engineering Sciences 2010 This thesis entitled: Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object written by Nathan C. Shupe has been approved for the Department of Aerospace Engineering Sciences Daniel Scheeres Prof. George Born Assoc. Prof. Hanspeter Schaub Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. iii Shupe, Nathan C. (M.S., Aerospace Engineering Sciences) Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object Thesis directed by Prof. Daniel Scheeres Based on the recommendations of the Augustine Commission, President Obama has pro- posed a vision for U.S. human spaceflight in the post-Shuttle era which includes a manned mission to a Near-Earth Object (NEO). A 2006-2007 study commissioned by the Constellation Program Advanced Projects Office investigated the feasibility of sending a crewed Orion spacecraft to a NEO using different combinations of elements from the latest launch system architecture at that time. The study found a number of suitable mission targets in the database of known NEOs, and pre- dicted that the number of candidate NEOs will continue to increase as more advanced observatories come online and execute more detailed surveys of the NEO population. -

Mission Design for the Lunar Reconnaissance Orbiter
AAS 07-057 Mission Design for the Lunar Reconnaissance Orbiter Mark Beckman Goddard Space Flight Center, Code 595 29th ANNUAL AAS GUIDANCE AND CONTROL CONFERENCE February 4-8, 2006 Sponsored by Breckenridge, Colorado Rocky Mountain Section AAS Publications Office, P.O. Box 28130 - San Diego, California 92198 AAS-07-057 MISSION DESIGN FOR THE LUNAR RECONNAISSANCE ORBITER † Mark Beckman The Lunar Reconnaissance Orbiter (LRO) will be the first mission under NASA’s Vision for Space Exploration. LRO will fly in a low 50 km mean altitude lunar polar orbit. LRO will utilize a direct minimum energy lunar transfer and have a launch window of three days every two weeks. The launch window is defined by lunar orbit beta angle at times of extreme lighting conditions. This paper will define the LRO launch window and the science and engineering constraints that drive it. After lunar orbit insertion, LRO will be placed into a commissioning orbit for up to 60 days. This commissioning orbit will be a low altitude quasi-frozen orbit that minimizes stationkeeping costs during commissioning phase. LRO will use a repeating stationkeeping cycle with a pair of maneuvers every lunar sidereal period. The stationkeeping algorithm will bound LRO altitude, maintain ground station contact during maneuvers, and equally distribute periselene between northern and southern hemispheres. Orbit determination for LRO will be at the 50 m level with updated lunar gravity models. This paper will address the quasi-frozen orbit design, stationkeeping algorithms and low lunar orbit determination. INTRODUCTION The Lunar Reconnaissance Orbiter (LRO) is the first of the Lunar Precursor Robotic Program’s (LPRP) missions to the moon. -
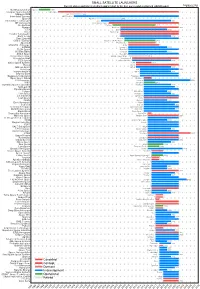
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

Five Special Types of Orbits Around Mars
JOURNAL OF GUIDANCE,CONTROL, AND DYNAMICS Vol. 33, No. 4, July–August 2010 Engineering Notes Five Special Types of Orbits sensing satellites. Lagrangian planetary equations, which give the mean precession rate of the line of node, provide the theoretical Around Mars foundation of sun-synchronous orbits. Boain described basic mechanical characteristics of Earth’s sun-synchronous orbits and ∗ † ‡ provided several design algorithms to satisfy practical mission Xiaodong Liu, Hexi Baoyin, and Xingrui Ma requirements [4]. Several Martian satellites have been placed into Tsinghua University, sun-synchronous orbits, such as MGS [1] and MRO [2]. 100084 Beijing, People’s Republic of China Orbits at the critical inclination can keep eccentricity and argument of perigee invariable on average. For example, the Molniya DOI: 10.2514/1.48706 and Tundra orbits applied such conditions to stop the rotation of argument of perigee. Orlov introduced the concept of the Earth Nomenclature critical inclination [5], and Brouwer eliminated short-period terms based on canonical transformations [6]. Later, Coffey et al. analyzed a = semimajor axis, km the averaged Hamilton system reduced by the Delaunay normal- e = orbital eccentricity ization and provided geometrical interpretation of the critical i = orbital inclination, deg. inclination for Earth’s artificial satellites [7]. Some research has J2 = second-order zonal harmonic regarded orbits at the critical inclination as types of frozen orbits J3 = third-order zonal harmonic [8,9]. J4 = fourth-order zonal harmonic Frozen orbits have always been an important focus of orbit design, J22 = second-degree and -order tesseral harmonic because their average eccentricity and argument of perigee remain M = mean anomaly, deg. -

Aas 12-269 Frozen Orbits for Scientific Missions Using
AAS 12-269 FROZEN ORBITS FOR SCIENTIFIC MISSIONS USING ROTATING TETHERS Hodei Urrutxua,∗ Jes ´usPelaez´ y and Martin Laraz We derive a semi-analytic formulation that permits to study the long-term dynam- ics of fast-rotating inert tethers around planetary satellites. Since space tethers are extensive bodies they generate non-keplerian gravitational forces which depend solely on their mass geometry and attitude, that can be exploited for controlling science orbits. We conclude that rotating tethers modify the geometry of frozen orbits, allowing for lower eccentricity frozen orbits for a wide range of orbital in- clination, where the length of the tether becomes a new parameter that the mission analyst may use to shape frozen orbits to tighter operational constraints. INTRODUCTION Science orbits for missions to planetary satellites have, in general, low altitudes and near-polar inclinations so that the entire surface can be mapped, and the science requirements of the mission can be accomplished.1,2 However, designing such an orbit can be difficult because the dynamical environment of many planetary satellites is highly perturbed due to their proximity to the central planet.3 One such example is the Moon, on which we focus on the current study. High-inclination orbits around the Moon are known to be unstable.4,5,6 However, the onset of instability can be delayed by a proper orbit design, hence maximizing the orbital lifetime.7 In this regard, the so called frozen orbits offer an interesting starting point for the design of science orbits,1,8,9 since all their orbital elements, with the only exception of the mean anomaly and the longitude of the ascending node, remain constant. -

Sun-Synchronous Satellites
Topic: Sun-synchronous Satellites Course: Remote Sensing and GIS (CC-11) M.A. Geography (Sem.-3) By Dr. Md. Nazim Professor, Department of Geography Patna College, Patna University Lecture-3 Concept: Orbits and their Types: Any object that moves around the Earth has an orbit. An orbit is the path that a satellite follows as it revolves round the Earth. The plane in which a satellite always moves is called the orbital plane and the time taken for completing one orbit is called orbital period. Orbit is defined by the following three factors: 1. Shape of the orbit, which can be either circular or elliptical depending upon the eccentricity that gives the shape of the orbit, 2. Altitude of the orbit which remains constant for a circular orbit but changes continuously for an elliptical orbit, and 3. Angle that an orbital plane makes with the equator. Depending upon the angle between the orbital plane and equator, orbits can be categorised into three types - equatorial, inclined and polar orbits. Different orbits serve different purposes. Each has its own advantages and disadvantages. There are several types of orbits: 1. Polar 2. Sunsynchronous and 3. Geosynchronous Field of View (FOV) is the total view angle of the camera, which defines the swath. When a satellite revolves around the Earth, the sensor observes a certain portion of the Earth’s surface. Swath or swath width is the area (strip of land of Earth surface) which a sensor observes during its orbital motion. Swaths vary from one sensor to another but are generally higher for space borne sensors (ranging between tens and hundreds of kilometers wide) in comparison to airborne sensors. -

Redalyc.Status and Trends of Smallsats and Their Launch Vehicles
Journal of Aerospace Technology and Management ISSN: 1984-9648 [email protected] Instituto de Aeronáutica e Espaço Brasil Wekerle, Timo; Bezerra Pessoa Filho, José; Vergueiro Loures da Costa, Luís Eduardo; Gonzaga Trabasso, Luís Status and Trends of Smallsats and Their Launch Vehicles — An Up-to-date Review Journal of Aerospace Technology and Management, vol. 9, núm. 3, julio-septiembre, 2017, pp. 269-286 Instituto de Aeronáutica e Espaço São Paulo, Brasil Available in: http://www.redalyc.org/articulo.oa?id=309452133001 How to cite Complete issue Scientific Information System More information about this article Network of Scientific Journals from Latin America, the Caribbean, Spain and Portugal Journal's homepage in redalyc.org Non-profit academic project, developed under the open access initiative doi: 10.5028/jatm.v9i3.853 Status and Trends of Smallsats and Their Launch Vehicles — An Up-to-date Review Timo Wekerle1, José Bezerra Pessoa Filho2, Luís Eduardo Vergueiro Loures da Costa1, Luís Gonzaga Trabasso1 ABSTRACT: This paper presents an analysis of the scenario of small satellites and its correspondent launch vehicles. The INTRODUCTION miniaturization of electronics, together with reliability and performance increase as well as reduction of cost, have During the past 30 years, electronic devices have experienced allowed the use of commercials-off-the-shelf in the space industry, fostering the Smallsat use. An analysis of the enormous advancements in terms of performance, reliability and launched Smallsats during the last 20 years is accomplished lower prices. In the mid-80s, a USD 36 million supercomputer and the main factors for the Smallsat (r)evolution, outlined. -

Low Rfi Observations from a Low-Altitude Frozen Lunar Orbit
https://ntrs.nasa.gov/search.jsp?R=20170010155 2019-08-31T01:49:00+00:00Z (Preprint) AAS 17-333 DARE MISSION DESIGN: LOW RFI OBSERVATIONS FROM A LOW-ALTITUDE FROZEN LUNAR ORBIT Laura Plice* and Ken Galal † The Dark Ages Radio Experiment (DARE) seeks to study the cosmic Dark Ages approximately 80 to 420 million years after the Big Bang. Observations require truly quiet radio conditions, shielded from Sun and Earth electromagnetic (EM) emissions, on the far side of the Moon. DARE’s science orbit is a frozen orbit with respect to lunar gravitational perturbations. The altitude and orientation of the orbit remain nearly fixed indefinitely without maintenance. DARE’s obser- vation targets avoid the galactic center and enable investigation of the universe’s first stars and galaxies. INTRODUCTION The Dark Ages Radio Experiment (DARE), currently proposed for NASA’s 2016 Astrophys- ics Medium Explorer (MIDEX) announcement of opportunity, seeks to study the universe in the cosmic Dark Ages approximately 80 to 420 million years after the Big Bang.1 DARE’s observa- tions require truly quiet radio conditions, shielded from Sun and Earth EM emissions, a zone which is only available on the far side of the Moon. To maximize time in the best science condi- tions, DARE requires a low, equatorial lunar orbit. For DARE, diffraction effects define quiet cones in the anti-Earth and anti-Sun sides of the Moon. In the science phase, the DARE satellite passes through the Earth-quiet cone on every orbit (designated Secondary Science) and simultaneously through the Sun shadow for 0 to 100% of every pass (Prime Science observations). -

Analytical Investigations of Quasi-Circular Frozen Orbits in The
Analytical investigations of quasi-circular frozen orbits in the Martian gravity field Xiaodong Liu1, Hexi Baoyin2, and Xingrui Ma3 School of Aerospace, Tsinghua University, Beijing 100084 CHINA Email: [email protected]; [email protected]; [email protected] Abstract Frozen orbits are always important foci of orbit design because of their valuable characteristics that their eccentricity and argument of pericentre remain constant on average. This study investigates quasi-circular frozen orbits and examines their basic nature analytically using two different methods. First, an analytical method based on Lagrangian formulations is applied to obtain constraint conditions for Martian frozen orbits. Second, Lie transforms are employed to locate these orbits accurately, and draw the contours of the Hamiltonian to show evolutions of the equilibria. Both methods are verified by numerical integrations in an 80 80 Mars gravity field. The simulations demonstrate that these two analytical methods can provide accurate enough results. By comparison, the two methods are found well consistent with each other, and both discover four families of Martian frozen orbits: three families with small eccentricities and one family near the critical inclination. The results also show some valuable conclusions: for the majority of Martian frozen orbits, argument of pericentre are kept at 270 degrees because J3 has the same sign with J2; while for a minority of ones with low altitude and low inclination, 1 PhD candidate, School of Aerospace, Tsinghua University 2 Associate Professor, School of Aerospace, Tsinghua University 3 Professor, School of Aerospace, Tsinghua University 1 argument of pericentre are possible to be kept at 90 degrees because of the effect of the higher degree odd zonals; for the critical inclinations cases, argument of pericentre can also be kept at 90 degrees. -

ISTS-2017-D-110ⅠISSFD-2017-110
50,000 Laps Around Mars: Navigating the Mars Reconnaissance Orbiter Through the Extended Missions (January 2009 – March 2017) By Premkumar MENON,1) Sean WAGNER,1) Stuart DEMCAK,1) David JEFFERSON,1) Eric GRAAT,1) Kyong LEE,1) and William SCHULZE1) 1)Jet Propulsion Laboratory, California Institute of Technology, USA (Received May 25th, 2017) Orbiting Mars since March 2006, the Mars Reconnaissance Orbiter (MRO) spacecraft continues to perform valuable science observations, provide telecommunication relay for surface assets, and characterize landing sites for future missions. Previous papers reported on the navigation of MRO from interplanetary cruise through the end of the Primary Science Phase in December 2008. This paper highlights the navigation of MRO from January 2009 through March 2017, covering the Extended Science Phase, the first three extended missions, and a portion of the fourth extended mission. The MRO mission returned over 300 terabytes of data since beginning primary science operations in November 2006. Key Words: Navigation, orbit determination, propulsive maneuvers, reconstruction, phasing 1. Introduction Siding Spring at Mars in October 20144) and imaged the Exo- Mars lander Schiaparelli in October 2016.5,6) MRO plans to The Mars Reconnaissance Orbiter spacecraft launched from provide telecommunication support for the Entry, Descent, and Cape Canaveral Air Force Station on August 12, 2005. MRO Landing (EDL) phase of NASA’s InSight mission in November entered orbit around Mars on March 10, 2006 following an in- 2018 and NASA’s Mars 2020 mission in February 2021. terplanetary cruise of seven months. After five months of aer- obraking and three months of transition to the Primary Sci- 2.1. -

Design of Frozen Orbits for Lunar Navigation and Communications Missions
DESIGN OF FROZEN ORBITS FOR LUNAR NAVIGATION AND COMMUNICATIONS MISSIONS By Joel Jefferson Konkle Parker A Thesis Submitted to the Faculty of Mississippi State University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Aerospace Engineering in the Department of Aerospace Engineering Mississippi State, Mississippi August 2008 Copyright by Joel Jefferson Konkle Parker 2008 DESIGN OF FROZEN ORBITS FOR LUNAR NAVIGATION AND COMMUNICATIONS MISSIONS By Joel Jefferson Konkle Parker Approved: ___________________________________________________ ___________________________________________________ Carrie D. Olsen Gregory D. Olsen Assistant Professor Assistant Professor of Aerospace Engineering of Aerospace Engineering (Director of Thesis) (Committee Member) ___________________________________________________ ___________________________________________________ Ming Xin Pasquale Cinnella Assistant Professor Professor of Aerospace Engineering of Aerospace Engineering Graduate Coordinator of the (Committee Member) Department of Aerospace Engineering ___________________________________________________ W. Glenn Steele Interim Dean of the James Worth Bagley College of Engineering Name: Joel Jefferson Konkle Parker Date of Degree: August 9, 2008 Institution: Mississippi State University Major Field: Aerospace Engineering Major Professor: Dr. Carrie D. Olsen Title of Study: DESIGN OF FROZEN ORBITS FOR LUNAR NAVIGATION AND COMMUNICATIONS MISSIONS Pages in Study: 133 Candidate for Degree of Master of Science Eccentric lunar