An Axiom of True Courses Calculation in Great Circle Navigation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
1 Chapter 3 Plane and Spherical Trigonometry 3.1
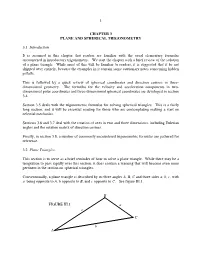
1 CHAPTER 3 PLANE AND SPHERICAL TRIGONOMETRY 3.1 Introduction It is assumed in this chapter that readers are familiar with the usual elementary formulas encountered in introductory trigonometry. We start the chapter with a brief review of the solution of a plane triangle. While most of this will be familiar to readers, it is suggested that it be not skipped over entirely, because the examples in it contain some cautionary notes concerning hidden pitfalls. This is followed by a quick review of spherical coordinates and direction cosines in three- dimensional geometry. The formulas for the velocity and acceleration components in two- dimensional polar coordinates and three-dimensional spherical coordinates are developed in section 3.4. Section 3.5 deals with the trigonometric formulas for solving spherical triangles. This is a fairly long section, and it will be essential reading for those who are contemplating making a start on celestial mechanics. Sections 3.6 and 3.7 deal with the rotation of axes in two and three dimensions, including Eulerian angles and the rotation matrix of direction cosines. Finally, in section 3.8, a number of commonly encountered trigonometric formulas are gathered for reference. 3.2 Plane Triangles . This section is to serve as a brief reminder of how to solve a plane triangle. While there may be a temptation to pass rapidly over this section, it does contain a warning that will become even more pertinent in the section on spherical triangles. Conventionally, a plane triangle is described by its three angles A, B, C and three sides a, b, c, with a being opposite to A, b opposite to B, and c opposite to C. -

Spherical Trigonometry
Spherical trigonometry 1 The spherical Pythagorean theorem Proposition 1.1 On a sphere of radius R, any right triangle 4ABC with \C being the right angle satisfies cos(c=R) = cos(a=R) cos(b=R): (1) Proof: Let O be the center of the sphere, we may assume its coordinates are (0; 0; 0). We may rotate −! the sphere so that A has coordinates OA = (R; 0; 0) and C lies in the xy-plane, see Figure 1. Rotating z B y O(0; 0; 0) C A(R; 0; 0) x Figure 1: The Pythagorean theorem for a spherical right triangle around the z axis by β := AOC takes A into C. The edge OA moves in the xy-plane, by β, thus −−!\ the coordinates of C are OC = (R cos(β);R sin(β); 0). Since we have a right angle at C, the plane of 4OBC is perpendicular to the plane of 4OAC and it contains the z axis. An orthonormal basis −−! −! of the plane of 4OBC is given by 1=R · OC = (cos(β); sin(β); 0) and the vector OZ := (0; 0; 1). A rotation around O in this plane by α := \BOC takes C into B: −−! −−! −! OB = cos(α) · OC + sin(α) · R · OZ = (R cos(β) cos(α);R sin(β) cos(α);R sin(α)): Introducing γ := \AOB, we have −! −−! OA · OB R2 cos(α) cos(β) cos(γ) = = : R2 R2 The statement now follows from α = a=R, β = b=R and γ = c=R. ♦ To prove the rest of the formulas of spherical trigonometry, we need to show the following. -

The Sphere of the Earth Description and Technical Manual
The Sphere of the Earth Description and Technical Manual December 20, 2012 Daniel Ramos ∗ MMACA (Museu de Matem`atiquesde Catalunya) 1 The exhibit The exhibit we are presenting explores the science of cartography and the geometry of the sphere. Althoug this subject has been widely treated on science exhibitions and fairs, our proposal aims to be a more comprehensive and complete treatment on the subject, as well as to be a fully open source, documented material that both museographers and public can experience, learn and modify. The key concept comes from the problem of representing the spherical surface of the Earth onto a flat map. Studying this problem is the subject of cartography, and has been an important mathematical problem in History (navigation, position, frontiers, land ownership...). An essential theorem in Geometry (Gauss' Egregium theorem) ensures that there is no perfect map, that is, there is no way of repre- senting the Earth keeping distances at scale. However, this is exactly what makes cartography a discipline: developing several different maps that try to solve well enough the problem of representing the Earth. A common activity is comparing an Earth globe with a (Mercator) map, observ- ing that distances are not preserved. Our module explores far beyond that. We present: • Several different maps, currently 6 map projections are used, each one featuring different special properties. Printed at nominal scale 1:1 of a model globe. • The script programs that generate these pictures. Generating a map takes less than 50 lines of code, anyone could generate his own. ∗E-mail: [email protected] 1 • A collection of tools and models: a flexible ruler to be used over the globe, plane and spherical protractors, models showing longitude and latitude.. -

Spherical Trigonometry Through the Ages
School of Mathematics and Statistics Newcastle University MMath Mathematics Report Spherical Trigonometry Through the Ages Author: Supervisor: Lauren Roberts Dr. Andrew Fletcher May 1, 2015 Contents 1 Introduction 1 2 Geometry on the Sphere Part I 4 2.1 Cross-sections and Measurements . .4 2.2 Triangles on the Sphere . .7 2.2.1 What is the Largest Possible Spherical Triangle? . .7 2.2.2 The Sum of Spherical Angles . .9 3 Menelaus of Alexandria 12 3.1 Menelaus' Theorem . 13 3.2 Astronomy and the Menelaus Configuration: The Celestial Sphere . 16 4 Medieval Islamic Mathematics 18 4.1 The Rule of Four Quantities . 18 4.2 Finding the Qibla . 20 4.3 The Spherical Law of Sines . 22 5 Right-Angled Triangles 25 5.1 Pythagoras' Theorem on the Sphere . 25 5.2 The Spherical Law of Cosines . 27 6 Geometry on the Sphere Part II 30 6.1 Areas of Spherical Polygons . 30 6.2 Euler's Polyhedral Formula . 33 7 Quaternions 35 7.1 Some Useful Properties . 35 7.1.1 The Quaternion Product . 36 7.1.2 The Complex Conjugate and Inverse Quaternions . 36 1 CONTENTS 2 7.2 Rotation Sequences . 37 7.2.1 3-Dimensional Representation . 39 7.3 Deriving the Spherical Law of Sines . 39 8 Conclusions 42 Bibliography 44 Abstract The art of applying trigonometry to triangles constructed on the surface of the sphere is the branch of mathematics known as spherical trigonometry. It allows new theorems relating the sides and angles of spherical triangles to be derived. The history and development of spherical trigonometry throughout the ages is discussed. -
![Arxiv:1409.4736V1 [Math.HO] 16 Sep 2014](https://docslib.b-cdn.net/cover/7151/arxiv-1409-4736v1-math-ho-16-sep-2014-2067151.webp)
Arxiv:1409.4736V1 [Math.HO] 16 Sep 2014
ON THE WORKS OF EULER AND HIS FOLLOWERS ON SPHERICAL GEOMETRY ATHANASE PAPADOPOULOS Abstract. We review and comment on some works of Euler and his followers on spherical geometry. We start by presenting some memoirs of Euler on spherical trigonometry. We comment on Euler's use of the methods of the calculus of variations in spherical trigonometry. We then survey a series of geometrical resuls, where the stress is on the analogy between the results in spherical geometry and the corresponding results in Euclidean geometry. We elaborate on two such results. The first one, known as Lexell's Theorem (Lexell was a student of Euler), concerns the locus of the vertices of a spherical triangle with a fixed area and a given base. This is the spherical counterpart of a result in Euclid's Elements, but it is much more difficult to prove than its Euclidean analogue. The second result, due to Euler, is the spherical analogue of a generalization of a theorem of Pappus (Proposition 117 of Book VII of the Collection) on the construction of a triangle inscribed in a circle whose sides are contained in three lines that pass through three given points. Both results have many ramifications, involving several mathematicians, and we mention some of these developments. We also comment on three papers of Euler on projections of the sphere on the Euclidean plane that are related with the art of drawing geographical maps. AMS classification: 01-99 ; 53-02 ; 53-03 ; 53A05 ; 53A35. Keywords: spherical trigonometry, spherical geometry, Euler, Lexell the- orem, cartography, calculus of variations. -
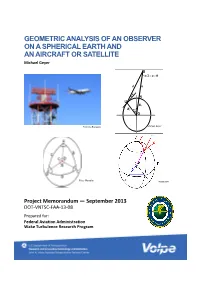
GEOMETRIC ANALYSIS of an OBSERVER on a SPHERICAL EARTH and an AIRCRAFT OR SATELLITE Michael Geyer
GEOMETRIC ANALYSIS OF AN OBSERVER ON A SPHERICAL EARTH AND AN AIRCRAFT OR SATELLITE Michael Geyer S π/2 - α - θ d h α N U Re Re θ O Federico Rostagno Michael Geyer Peter Mercator nosco.com Project Memorandum — September 2013 DOT-VNTSC-FAA-13-08 Prepared for: Federal Aviation Administration Wake Turbulence Research Program DOT/RITA Volpe Center TABLE OF CONTENTS 1. INTRODUCTION...................................................................................................... 1 1.1 Basic Problem and Solution Approach........................................................................................1 1.2 Vertical Plane Formulation ..........................................................................................................2 1.3 Spherical Surface Formulation ....................................................................................................3 1.4 Limitations and Applicability of Analysis...................................................................................4 1.5 Recommended Approach to Finding a Solution.........................................................................5 1.6 Outline of this Document ..............................................................................................................6 2. MATHEMATICS AND PHYSICS BASICS ............................................................... 8 2.1 Exact and Approximate Solutions to Common Equations ........................................................8 2.1.1 The Law of Sines for Plane Triangles.........................................................................................8 -

A Treatise on Spherical Trigonometry, and Its Application
A T REATISE SPHEEICAL T RIGONOMETKY. WORKSY B JOHN G ASEY, ESQ., LLD., F. R.8., FELLOWF O THE ROYAL UNIVERSITY OF IRELAND. Second E dition, Price 3s. A T REATISE ON ELEMENTARY TRIGONOMETRY, With n umerous Examples AND E&uesttfms f or Exammatttm. OKEY T THE EXERCISES IN THE TREATISE ON ELEMENTARY TRIGONOMETRY. Fifth E dition, Revised and Enlarged, Price 3s. 6d., Cloth. A S EQ,UEL TO THE FIRST SIX BOOKS OF THE ELEMENTS OF EUCLID, Containing- a n Easy Introduction to Modern Geometry . With a umerstts Examples. Seventh E dition, Price 4s. 6d. ; or in two parts, each 2s. 6d. THE E LEMENTS OE EUCLID, BOOKS I.-YL, AND PROPOSITIONS I.-XXI. OP BOOK XI. ; Together ' with an Appendix on the Cylinder, Sphere, Cone, &>c. @opdatt$ J tettotatiotts & aumeraus Exercises. Second E dition, Price 6s. AEY K TO THE EXERCISES IN THE FIRST SIX BOOKS OF CASEY'S "ELEMENTS OF EUCLID." Price 7 s. 6d. A T REATISE ON THE ANALYTICAL GEOMETRY OF THE POINT, LINE, CIRCLE, & CONIC SECTIONS, Containing a n Account of its most recent Extensions, Wxih t tttmeratts Examples. Price 7 s. 6d. A T REATISE ON PLANE TRIGONOMETRY, including THE THEORY OF HYPERBOLIC FUNCTIONS. LONDON : L ONGMANS? CO. DUBLIN: HODGES, FTGGIS & CO. A T REATISE ON- SPHERICAL T RIGONOMETRY, ANDTS I APPLICATION- TO GEODESYND A ASTRONOMY, ■WITH BY JOHN C ASEY, LL.D., F.E.S., Fellowf o the Royal University of Ireland; Memberf o the Council of the Royal Irish Academy ; Memberf o the Mathematical Societies of London and France ; Corresponding M ember of the Royal Society of Sciences of Liege; and Professorf o the Higher Mathematics and Mathematical Physics in t he Catholic University of Ireland. -

Spherical Trigonometry and Navigational Calculations
1 Spherical Trigonometry and Navigational Calculations Badar Abbas, Student, EME College, [email protected] In the 13th century, Nasir al-Din al Tusi (1201–74) and al- Abstract—This paper discusses the fundamental concepts in Battani, continued to develop spherical trigonometry. Tusi was spherical trigonometry and its application to the navigational the first (c. 1250) to write a work on trigonometry calculation. It briefly discusses the history of the spherical independently of astronomy. The final major development in trigonometry. It describes the commonly used terms in navigation and spherical trigonometry. It specifically concentrates on great- classical trigonometry was the invention of logarithms by the circle and dead-reckoning navigation. It also outlines the various Scottish mathematician John Napier in 1614 that greatly functions available in the Mapping Toolbox of MATLAB for such facilitated the art of numerical computation—including the navigational calculations. compilation of trigonometry tables [4]. Index Terms— Dead-reckoning, Geodesic, Great-circle, Navigation, Spherical Trigonometry. III. NAVIGATIONAL TERMINOLOGY Although the Earth is very round, in fact, it is a flattened I. INTRODUCTION sphere or spheroid with values for the radius of curvature of 6336 km at the equator and 6399 km at the poles. AVIGATION is the process of planning, recording, Approximating the earth as a sphere with a radius of 6370 km and controlling the movement of a craft or vehicle from N results in an actual error of up to about 0.5% [5]. The one location to another. The word derives from the Latin roots flattening of the ellipsoid is ~1/300 (1/298.257222101 is the navis (“ship”) and agere (“to move or direct”). -

The Forgotten Trigonometric Functions, Or How Trigonometry Was Used in the Ancient Art of Navigation (Before GPS!)
The Forgotten Trigonometric Functions, or How Trigonometry was used in the Ancient Art of Navigation (Before GPS!) Recently, as I was exploring some mathematical concept I came across some terms that were suspiciously similar to some familiar trigonometric functions. What is an excosecant? How about a Havercosine? As it turns out, these belong to a family of trigonometric functions that once enjoyed very standard usage, in very notable and practical fields, but in recent times have become nearly obsolete. ( ) Versine !"#$%& ! = 1 − cos ! !(!!!"# !) = The most basic of this family of functions is the ! versine, or versed sine. The versine, abbreviated ! 1 − cos ! versin of some angle x is actually calculated by = 2 !! ! 2 subtracting the cosine of x from 1; that is versin(x) = 1 - cos (x). Through some manipulations with half- 1 = 2 !"#! ! !! angle identities, we can see another equivalent 2 expression: Notice, we do not need the ± as the versine will always represent non-negative value (since cosine ranges from negative one to positive one, one minus these values will range from zero to two). This was especially helpful as navigators used logarithms in their calculations, so they could always take the logarithm of the versine. It is interesting that the Latin name for versine is either sinus versus (flipped sine, to distinguish from sinus rectus, the vertical sine) or sagitta, meaning arrow. It is easy to see, when looking at a drawing of the sine, cosine and versine why the reference to arrow occurs. Envision a bow and arrow; on the sketch, the arc AB is the bow, segment AB is the bowstring, and segment CD is the drawn arrow shaft, thus, the reference to an arrow. -
12.215 Modern Navigation
12.215 Modern Navigation Thomas Herring Review of Wednesday Class • Definition of heights – Ellipsoidal height (geometric) – Orthometric height (potential field based) • Shape of equipotential surface: Geoid for Earth • Methods for determining heights 09/27/2006 12.215 Modern Naviation L04 2 Today’s Class • Spherical Trigonometry – Review plane trigonometry – Concepts in Spherical Trigonometry • Distance measures • Azimuths and bearings – Basic formulas: • Cosine rule • Sine rule • http://mathworld.wolfram.com/SphericalTrigonometry.html is a good explanatory site 09/27/2006 12.215 Modern Naviation L04 3 Spherical Trigonometry • As the name implies, this is the style of trigonometry used to calculate angles and distances on a sphere • The form of the equations is similar to plane trigonometry but there are some complications. Specifically, in spherical triangles, the angles do not add to 180o • “Distances” are also angles but can be converted to distance units by multiplying the angles (in radians) by the radius of the sphere. • For small sized triangles, the spherical trigonometry formulas reduce to the plane form. 09/27/2006 12.215 Modern Naviation L04 4 Review of plane trigonometry • Although there are many plane trigonometry formulas, almost all quantities can be computed from two formulas: The cosine rule and sine rules. Angles A, B and C; Sides a, b and c A Sum of angles A+B+C=180 Cosine Rule: 2 2 2 b c = a +b − 2abcosC c Sine Rule: a b c = = sin A sinB sinC B C a 09/27/2006 12.215 Modern Naviation L04 5 Basic Rules (discussed in following slides) A B C are angles a b c are sides A (all quanties are angles) c b Sine Rule C sin a sin b sin c B a = = sin A sin B sinC O Cosine Rule sides cosa = cosbcosc+sinbsinccos A cosb = cosccosa +sincsinacos B cosc = cosbcosa +sinasinbcosC Cosine Rule angles cosA = −cos BcosC +sin BsinC cosa cosB =−cos AcosC +sin AsinC cosb cosC = −cosAcos B +sin Asin Bcosc 09/27/2006 12.215 Modern Naviation L04 6 Spherical Trigonometry Interpretation • Interpretation of sides: – The spherical triangle is formed on a sphere of unit radius. -

The Project Gutenberg Ebook of Spherical Trigonometry, by I
The Project Gutenberg EBook of Spherical Trigonometry, by I. Todhunter This eBook is for the use of anyone anywhere in the United States and most other parts of the world at no cost and with almost no restrictions whatsoever. You may copy it, give it away or re-use it under the terms of the Project Gutenberg License included with this eBook or online at www.gutenberg.org. If you are not located in the United States, you'll have to check the laws of the country where you are located before using this ebook. Title: Spherical Trigonometry For the Use of Colleges and Schools Author: I. Todhunter Release Date: August 19, 2020 [EBook #19770] Language: English Character set encoding: ISO-8859-1 *** START OF THIS PROJECT GUTENBERG EBOOK SPHERICAL TRIGONOMETRY *** Credit: K.F. Greiner, Berj Zamanian, Joshua Hutchinson andthe Online Distributed Proofreading Team at http://www.pgdp.net(This file was produced from images generously made availableby Cornell University Digital Collections SPHERICAL TRIGONOMETRY. ii SPHERICAL TRIGONOMETRY For the Use of Colleges and Schools: WITH NUMEROUS EXAMPLES. BY I. TODHUNTER, M.A., F.R.S., HONORARY FELLOW OF ST JOHN'S COLLEGE, CAMBRIDGE. FIFTH EDITION. London : MACMILLAN AND CO. 1886 [All Rights reserved.] ii Cambridge: PRINTED BY C. J. CLAY, M.A. AND SON, AT THE UNIVERSITY PRESS. PREFACE The present work is constructed on the same plan as my treatise on Plane Trigonometry, to which it is intended as a sequel; it contains all the propositions usually included under the head of Spherical Trigonometry, together with a large collection of examples for exercise. -

An Introduction to Solving Spherical Triangles
An Introduction to Solving Spherical Triangles Any mathematician worth his salt is capable of solving triangles in the plane using a variety of methodologies: the definition of trigonometric ratios and their inverses, the laws of sines and cosines, and possibly even the Pythagorean theorem. Very few are versed in the art of solving triangles on the sphere, as the art of spherical geometry and spherical trigonometry is all but lost, due to the advent of many technologies which render the necessity to apply these fields obsolete. Spherical Lines, Segments and Triangles Consider, for a moment, any sphere. In spherical geometry and trigonometry, a line is defined as the intersection of a plane with the sphere, provided the plane passes through the sphere’s center. In some circles (pun intended) it is known as a great circle. A spherical segment, similarly, is a finite piece of such a spherical line. Any spherical segment must be incident with a great circle. A spherical triangle, then, is a group of three spherical line segments, where the endpoints are incident with exactly two spherical segments. One can see that the triangles can take a variety of shapes, dependent upon how those segments interact with each other. The “line” through the points A collection of spherical A and B on the sphere. triangles The “segment” through the points A and B on the sphere. In spherical geometry, the spherical angle(henceforth denoted angle) formed by two spherical segments (hereafter referred to as segments) is measured by the angle formed by the planes intersecting the sphere to form the segments.