Spherical Trigonometry Through the Ages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
1 Chapter 3 Plane and Spherical Trigonometry 3.1
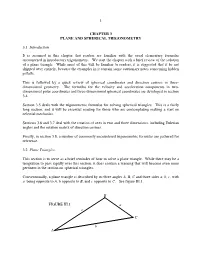
1 CHAPTER 3 PLANE AND SPHERICAL TRIGONOMETRY 3.1 Introduction It is assumed in this chapter that readers are familiar with the usual elementary formulas encountered in introductory trigonometry. We start the chapter with a brief review of the solution of a plane triangle. While most of this will be familiar to readers, it is suggested that it be not skipped over entirely, because the examples in it contain some cautionary notes concerning hidden pitfalls. This is followed by a quick review of spherical coordinates and direction cosines in three- dimensional geometry. The formulas for the velocity and acceleration components in two- dimensional polar coordinates and three-dimensional spherical coordinates are developed in section 3.4. Section 3.5 deals with the trigonometric formulas for solving spherical triangles. This is a fairly long section, and it will be essential reading for those who are contemplating making a start on celestial mechanics. Sections 3.6 and 3.7 deal with the rotation of axes in two and three dimensions, including Eulerian angles and the rotation matrix of direction cosines. Finally, in section 3.8, a number of commonly encountered trigonometric formulas are gathered for reference. 3.2 Plane Triangles . This section is to serve as a brief reminder of how to solve a plane triangle. While there may be a temptation to pass rapidly over this section, it does contain a warning that will become even more pertinent in the section on spherical triangles. Conventionally, a plane triangle is described by its three angles A, B, C and three sides a, b, c, with a being opposite to A, b opposite to B, and c opposite to C. -

Spherical Trigonometry
Spherical trigonometry 1 The spherical Pythagorean theorem Proposition 1.1 On a sphere of radius R, any right triangle 4ABC with \C being the right angle satisfies cos(c=R) = cos(a=R) cos(b=R): (1) Proof: Let O be the center of the sphere, we may assume its coordinates are (0; 0; 0). We may rotate −! the sphere so that A has coordinates OA = (R; 0; 0) and C lies in the xy-plane, see Figure 1. Rotating z B y O(0; 0; 0) C A(R; 0; 0) x Figure 1: The Pythagorean theorem for a spherical right triangle around the z axis by β := AOC takes A into C. The edge OA moves in the xy-plane, by β, thus −−!\ the coordinates of C are OC = (R cos(β);R sin(β); 0). Since we have a right angle at C, the plane of 4OBC is perpendicular to the plane of 4OAC and it contains the z axis. An orthonormal basis −−! −! of the plane of 4OBC is given by 1=R · OC = (cos(β); sin(β); 0) and the vector OZ := (0; 0; 1). A rotation around O in this plane by α := \BOC takes C into B: −−! −−! −! OB = cos(α) · OC + sin(α) · R · OZ = (R cos(β) cos(α);R sin(β) cos(α);R sin(α)): Introducing γ := \AOB, we have −! −−! OA · OB R2 cos(α) cos(β) cos(γ) = = : R2 R2 The statement now follows from α = a=R, β = b=R and γ = c=R. ♦ To prove the rest of the formulas of spherical trigonometry, we need to show the following. -

4. Alexandrian Mathematics After Euclid — I I I
4. Alexandrian mathematics after Euclid — I I I Due to the length of this unit , it has been split into three parts . This is the final part , and it deals with other Greek mathematicians and scientists from the period . The previously described works or Archimedes and Apollonius represent the deepest and most original discoveries in Greek geometry that have been passed down to us over the ages (there were probably others that did not survive) , and indeed they pushed the classical methods to their limits . More powerful tools would be needed to make further advances , and these were not developed until the 17 th century . Much of the subsequent activity in ancient Greek mathematics was more directed towards developing the trigonometry and spherical geometry needed for observational astronomy and studying questions of an arithmetic nature . At the beginning of this period there was also a resurgence of activity in astronomy and its related mathematics which continued the tradition of Babylonian mathematics in the Seleucid Empire ( c. 300 B.C.E. – 63 B.C.E) , and although there must have been some interaction , its precise extent is unclear . Eratosthenes of Cyrene Eratosthenes (276 – 197 B.C.E.) probably comes as close as anyone from this period to reaching the levels attained by Euclid , Archimedes and Apollonius . He is probably best known for applying geometric and trigonometric ideas to estimate the diameter of the earth to a fairly high degree of accuracy ; this work is summarized on pages 186 – 188 of Burton . Within mathematics itself , his main achievement was to give a systematic method for finding all primes which is known as the sieve of Eratosthenes. -

The Sphere of the Earth Description and Technical Manual
The Sphere of the Earth Description and Technical Manual December 20, 2012 Daniel Ramos ∗ MMACA (Museu de Matem`atiquesde Catalunya) 1 The exhibit The exhibit we are presenting explores the science of cartography and the geometry of the sphere. Althoug this subject has been widely treated on science exhibitions and fairs, our proposal aims to be a more comprehensive and complete treatment on the subject, as well as to be a fully open source, documented material that both museographers and public can experience, learn and modify. The key concept comes from the problem of representing the spherical surface of the Earth onto a flat map. Studying this problem is the subject of cartography, and has been an important mathematical problem in History (navigation, position, frontiers, land ownership...). An essential theorem in Geometry (Gauss' Egregium theorem) ensures that there is no perfect map, that is, there is no way of repre- senting the Earth keeping distances at scale. However, this is exactly what makes cartography a discipline: developing several different maps that try to solve well enough the problem of representing the Earth. A common activity is comparing an Earth globe with a (Mercator) map, observ- ing that distances are not preserved. Our module explores far beyond that. We present: • Several different maps, currently 6 map projections are used, each one featuring different special properties. Printed at nominal scale 1:1 of a model globe. • The script programs that generate these pictures. Generating a map takes less than 50 lines of code, anyone could generate his own. ∗E-mail: [email protected] 1 • A collection of tools and models: a flexible ruler to be used over the globe, plane and spherical protractors, models showing longitude and latitude.. -
![Arxiv:1409.4736V1 [Math.HO] 16 Sep 2014](https://docslib.b-cdn.net/cover/7151/arxiv-1409-4736v1-math-ho-16-sep-2014-2067151.webp)
Arxiv:1409.4736V1 [Math.HO] 16 Sep 2014
ON THE WORKS OF EULER AND HIS FOLLOWERS ON SPHERICAL GEOMETRY ATHANASE PAPADOPOULOS Abstract. We review and comment on some works of Euler and his followers on spherical geometry. We start by presenting some memoirs of Euler on spherical trigonometry. We comment on Euler's use of the methods of the calculus of variations in spherical trigonometry. We then survey a series of geometrical resuls, where the stress is on the analogy between the results in spherical geometry and the corresponding results in Euclidean geometry. We elaborate on two such results. The first one, known as Lexell's Theorem (Lexell was a student of Euler), concerns the locus of the vertices of a spherical triangle with a fixed area and a given base. This is the spherical counterpart of a result in Euclid's Elements, but it is much more difficult to prove than its Euclidean analogue. The second result, due to Euler, is the spherical analogue of a generalization of a theorem of Pappus (Proposition 117 of Book VII of the Collection) on the construction of a triangle inscribed in a circle whose sides are contained in three lines that pass through three given points. Both results have many ramifications, involving several mathematicians, and we mention some of these developments. We also comment on three papers of Euler on projections of the sphere on the Euclidean plane that are related with the art of drawing geographical maps. AMS classification: 01-99 ; 53-02 ; 53-03 ; 53A05 ; 53A35. Keywords: spherical trigonometry, spherical geometry, Euler, Lexell the- orem, cartography, calculus of variations. -

Hyperbolic Geometry in the Work of Johann Heinrich Lambert Athanase Papadopoulos, Guillaume Théret
Hyperbolic geometry in the work of Johann Heinrich Lambert Athanase Papadopoulos, Guillaume Théret To cite this version: Athanase Papadopoulos, Guillaume Théret. Hyperbolic geometry in the work of Johann Heinrich Lambert. Ganita Bharati (Indian Mathematics): Journal of the Indian Society for History of Mathe- matics, 2014, 36 (2), p. 129-155. hal-01123965 HAL Id: hal-01123965 https://hal.archives-ouvertes.fr/hal-01123965 Submitted on 5 Mar 2015 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. HYPERBOLIC GEOMETRY IN THE WORK OF J. H. LAMBERT ATHANASE PAPADOPOULOS AND GUILLAUME THERET´ Abstract. The memoir Theorie der Parallellinien (1766) by Jo- hann Heinrich Lambert is one of the founding texts of hyperbolic geometry, even though its author’s aim was, like many of his pre- decessors’, to prove that such a geometry does not exist. In fact, Lambert developed his theory with the hope of finding a contra- diction in a geometry where all the Euclidean axioms are kept except the parallel axiom and that the latter is replaced by its negation. In doing so, he obtained several fundamental results of hyperbolic geometry. This was sixty years before the first writings of Lobachevsky and Bolyai appeared in print. -
GEOMETRIC ANALYSIS of an OBSERVER on a SPHERICAL EARTH and an AIRCRAFT OR SATELLITE Michael Geyer
GEOMETRIC ANALYSIS OF AN OBSERVER ON A SPHERICAL EARTH AND AN AIRCRAFT OR SATELLITE Michael Geyer S π/2 - α - θ d h α N U Re Re θ O Federico Rostagno Michael Geyer Peter Mercator nosco.com Project Memorandum — September 2013 DOT-VNTSC-FAA-13-08 Prepared for: Federal Aviation Administration Wake Turbulence Research Program DOT/RITA Volpe Center TABLE OF CONTENTS 1. INTRODUCTION...................................................................................................... 1 1.1 Basic Problem and Solution Approach........................................................................................1 1.2 Vertical Plane Formulation ..........................................................................................................2 1.3 Spherical Surface Formulation ....................................................................................................3 1.4 Limitations and Applicability of Analysis...................................................................................4 1.5 Recommended Approach to Finding a Solution.........................................................................5 1.6 Outline of this Document ..............................................................................................................6 2. MATHEMATICS AND PHYSICS BASICS ............................................................... 8 2.1 Exact and Approximate Solutions to Common Equations ........................................................8 2.1.1 The Law of Sines for Plane Triangles.........................................................................................8 -

Bibliography
Bibliography A. Aaboe, Episodes from the Early History of Mathematics (Random House, New York, 1964) A.D. Aczel, Fermat’s Last Theorem: Unlocking the Secret of an Ancient Mathematical Problem (Four Walls Eight Windows, New York, 1996) D. Adamson, Blaise Pascal: Mathematician, Physicist, and Thinker About God (St. Martin’s Press, New York, 1995) R.P. Agarwal, H. Agarwal, S.K. Sen, Birth, Growth and Computation of Pi to ten trillion digits. Adv. Differ. Equat. 2013, 100 (2013) A.A. Al-Daffa’, The Muslim Contribution to Mathematics (Humanities Press, Atlantic Highlands, 1977) A.A. Al-Daffa’, J.J. Stroyls, Studies in the Exact Sciences in Medieval Islam (Wiley, New York, 1984) E.J. Aiton, Leibniz: A Biography (A. Hilger, Bristol, Boston, 1984) R.E. Allen, Greek Philosophy: Thales to Aristotle (The Free Press, New York, 1966) G.J. Allman, Greek Geometry from Thales to Euclid (Arno Press, New York, 1976) E.N. da C. Andrade, Sir Issac Newton, His Life and Work (Doubleday & Co., New York, 1954) W.S. Anglin, Mathematics: A Concise History and Philosophy (Springer, New York, 1994) W.S. Anglin, The Queen of Mathematics (Kluwer, Dordrecht, 1995) H.D. Anthony, Sir Isaac Newton (Abelard-Schuman, New York, 1960) H.G. Apostle, Aristotle’s Philosophy of Mathematics (The University of Chicago Press, Chicago, 1952) R.C. Archibald, Outline of the history of mathematics.Am. Math. Monthly 56 (1949) B. Artmann, Euclid: The Creation of Mathematics (Springer, New York, 1999) C.N. Srinivasa Ayyangar, The History of Ancient Indian Mathematics (World Press Private Ltd., Calcutta, 1967) A.K. Bag, Mathematics in Ancient and Medieval India (Chaukhambha Orientalia, Varanasi, 1979) W.W.R. -

A Treatise on Spherical Trigonometry, and Its Application
A T REATISE SPHEEICAL T RIGONOMETKY. WORKSY B JOHN G ASEY, ESQ., LLD., F. R.8., FELLOWF O THE ROYAL UNIVERSITY OF IRELAND. Second E dition, Price 3s. A T REATISE ON ELEMENTARY TRIGONOMETRY, With n umerous Examples AND E&uesttfms f or Exammatttm. OKEY T THE EXERCISES IN THE TREATISE ON ELEMENTARY TRIGONOMETRY. Fifth E dition, Revised and Enlarged, Price 3s. 6d., Cloth. A S EQ,UEL TO THE FIRST SIX BOOKS OF THE ELEMENTS OF EUCLID, Containing- a n Easy Introduction to Modern Geometry . With a umerstts Examples. Seventh E dition, Price 4s. 6d. ; or in two parts, each 2s. 6d. THE E LEMENTS OE EUCLID, BOOKS I.-YL, AND PROPOSITIONS I.-XXI. OP BOOK XI. ; Together ' with an Appendix on the Cylinder, Sphere, Cone, &>c. @opdatt$ J tettotatiotts & aumeraus Exercises. Second E dition, Price 6s. AEY K TO THE EXERCISES IN THE FIRST SIX BOOKS OF CASEY'S "ELEMENTS OF EUCLID." Price 7 s. 6d. A T REATISE ON THE ANALYTICAL GEOMETRY OF THE POINT, LINE, CIRCLE, & CONIC SECTIONS, Containing a n Account of its most recent Extensions, Wxih t tttmeratts Examples. Price 7 s. 6d. A T REATISE ON PLANE TRIGONOMETRY, including THE THEORY OF HYPERBOLIC FUNCTIONS. LONDON : L ONGMANS? CO. DUBLIN: HODGES, FTGGIS & CO. A T REATISE ON- SPHERICAL T RIGONOMETRY, ANDTS I APPLICATION- TO GEODESYND A ASTRONOMY, ■WITH BY JOHN C ASEY, LL.D., F.E.S., Fellowf o the Royal University of Ireland; Memberf o the Council of the Royal Irish Academy ; Memberf o the Mathematical Societies of London and France ; Corresponding M ember of the Royal Society of Sciences of Liege; and Professorf o the Higher Mathematics and Mathematical Physics in t he Catholic University of Ireland. -

An Axiom of True Courses Calculation in Great Circle Navigation
Journal of Marine Science and Engineering Communication An Axiom of True Courses Calculation in Great Circle Navigation Mate Baric 1, David Brˇci´c 2,* , Mate Kosor 1 and Roko Jelic 1 1 Maritime Department, University of Zadar, 23000 Zadar, Croatia; [email protected] (M.B.); [email protected] (M.K.); [email protected] (R.J.) 2 Faculty of Maritime Studies, University of Rijeka, 51000 Rijeka, Croatia * Correspondence: [email protected] Abstract: Based on traditional expressions and spherical trigonometry, at present, great circle naviga- tion is undertaken using various navigational software packages. Recent research has mainly focused on vector algebra. These problems are calculated numerically and are thus suited to computer-aided great circle navigation. However, essential knowledge requires the navigator to be able to calculate navigation parameters without the use of aids. This requirement is met using spherical trigonometry functions and the Napier wheel. In addition, to facilitate calculation, certain axioms have been developed to determine a vessel’s true course. These axioms can lead to misleading results due to the limitations of the trigonometric functions, mathematical errors, and the type of great circle navigation. The aim of this paper is to determine a reliable trigonometric function for calculating a vessel’s course in regular and composite great circle navigation, which can be used with the proposed axioms. This was achieved using analysis of the trigonometric functions, and assessment of their impact on the vessel’s calculated course and established axioms. Citation: Baric, M.; Brˇci´c,D.; Kosor, Keywords: great circle; navigation; axiom M.; Jelic, R. An Axiom of True Courses Calculation in Great Circle Navigation. -

MA 341 Fall 2011
MA 341 Fall 2011 The Origins of Geometry 1.1: Introduction In the beginning geometry was a collection of rules for computing lengths, areas, and volumes. Many were crude approximations derived by trial and error. This body of knowledge, developed and used in construction, navigation, and surveying by the Babylonians and Egyptians, was passed to the Greeks. The Greek historian Herodotus (5th century BC) credits the Egyptians with having originated the subject, but there is much evidence that the Babylonians, the Hindu civilization, and the Chinese knew much of what was passed along to the Egyptians. The Babylonians of 2,000 to 1,600 BC knew much about navigation and astronomy, which required knowledge of geometry. Clay tablets from the Sumerian (2100 BC) and the Babylonian cultures (1600 BC) include tables for computing products, reciprocals, squares, square roots, and other mathematical functions useful in financial calculations. Babylonians were able to compute areas of rectangles, right and isosceles triangles, trapezoids and circles. They computed the area of a circle as the square of the circumference divided by twelve. The Babylonians were also responsible for dividing the circumference of a circle into 360 equal parts. They also used the Pythagorean Theorem (long before Pythagoras), performed calculations involving ratio and proportion, and studied the relationships between the elements of various triangles. See Appendices A and B for more about the mathematics of the Babylonians. 1.2: A History of the Value of π The Babylonians also considered the circumference of the circle to be three times the diameter. Of course, this would make 3 — a small problem. -

A Concise History of the Philosophy of Mathematics
A Thumbnail History of the Philosophy of Mathematics "It is beyond a doubt that all our knowledge begins with experience." - Imannuel Kant ( 1724 – 1804 ) ( However naïve realism is no substitute for truth [1] ) [1] " ... concepts have reference to sensible experience, but they are never, in a logical sense, deducible from them. For this reason I have never been able to comprehend the problem of the á priori as posed by Kant", from "The Problem of Space, Ether, and the Field in Physics" ( "Das Raum-, Äether- und Feld-Problem der Physik." ), by Albert Einstein, 1934 - source: "Beyond Geometry: Classic Papers from Riemann to Einstein", Dover Publications, by Peter Pesic, St. John's College, Sante Fe, New Mexico Mathematics does not have a universally accepted definition during any period of its development throughout the history of human thought. However for the last 2,500 years, beginning first with the pre - Hellenic Egyptians and Babylonians, mathematics encompasses possible deductive relationships concerned solely with logical truths derived by accepted philosophic methods of logic which the classical Greek thinkers of antiquity pioneered. Although it is normally associated with formulaic algorithms ( i.e., mechanical methods ), mathematics somehow arises in the human mind by the correspondence of observation and inductive experiential thinking together with its practical predictive powers in interpreting future as well as "seemingly" ephemeral phenomena. Why all of this is true in human progress, no one can answer faithfully. In other words, human experiences and intuitive thinking first suggest to the human mind the abstract symbols for which the economy of human thinking mathematics is well known; but it is those parts of mathematics most disconnected from observation and experience and therefore relying almost wholly upon its internal, self - consistent, deductive logics giving mathematics an independent reified, almost ontological, reality, that mathematics most powerfully interprets the ultimate hidden mysteries of nature.