Image Processing for Capturing Motions of Crowd and Its Application to Pedestrian-Induced Lateral Vibration of a Footbridge
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Formula 1 Race Car Performance Improvement by Optimization of the Aerodynamic Relationship Between the Front and Rear Wings
The Pennsylvania State University The Graduate School College of Engineering FORMULA 1 RACE CAR PERFORMANCE IMPROVEMENT BY OPTIMIZATION OF THE AERODYNAMIC RELATIONSHIP BETWEEN THE FRONT AND REAR WINGS A Thesis in Aerospace Engineering by Unmukt Rajeev Bhatnagar © 2014 Unmukt Rajeev Bhatnagar Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science December 2014 The thesis of Unmukt R. Bhatnagar was reviewed and approved* by the following: Mark D. Maughmer Professor of Aerospace Engineering Thesis Adviser Sven Schmitz Assistant Professor of Aerospace Engineering George A. Lesieutre Professor of Aerospace Engineering Head of the Department of Aerospace Engineering *Signatures are on file in the Graduate School ii Abstract The sport of Formula 1 (F1) has been a proving ground for race fanatics and engineers for more than half a century. With every driver wanting to go faster and beat the previous best time, research and innovation in engineering of the car is really essential. Although higher speeds are the main criterion for determining the Formula 1 car’s aerodynamic setup, post the San Marino Grand Prix of 1994, the engineering research and development has also targeted for driver’s safety. The governing body of Formula 1, i.e. Fédération Internationale de l'Automobile (FIA) has made significant rule changes since this time, primarily targeting car safety and speed. Aerodynamic performance of a F1 car is currently one of the vital aspects of performance gain, as marginal gains are obtained due to engine and mechanical changes to the car. Thus, it has become the key to success in this sport, resulting in teams spending millions of dollars on research and development in this sector each year. -

Portland Supplemental Rules Driving and Track Supplemental Rules
UPDATED ON 21 October 2012 Version 2 ChumpCar Unabashedly Presents “Ghosts & Goblins & Ghouls & Grease” Portland International Raceway 27-28 October 2012 Format: 12 + 6 Registration: Please note that the Registration & Payment Due Date for this race is technically passed; but a few spots do remain open (as of Oct. 21) and can be secured by registering online at www.ChumpCar.com or by contacting the West Region registration coordinator at [email protected] or 925.519.1069. Complete registration information, including pricing, can be located on ChumpCar’s website under RULES, specifically Section 6.0 Entries & Teams. P.O. Box 1541 Morgan Hill, CA 95038 www.chumpcar.com [email protected] “GGGG” Friday 26 October Schedule: Friday: 12:00pm – 6:00pm Registration – RED LION HOTEL 12:00pm – 6:00pm Tech Inspection – RED LION HOTEL 12:00pm – 6:00pm Driver’s Gear Inspection– RED LION 6:00pm – 7:00pm Driver’s School – PIR TIMING TOWER in Paddock/3RD Floor 11:00pm TRACK GATES CLOSED – NO IN/OUT ACCESS *** UPON COMPLETED TECH INSPECTION & REGISTRATION, teams may enter PIR track sometime between 4:00pm – 5:00pm, NOT BEFORE! Pit Lanes & Paddock stalls will once again be assigned due to car count. There are no early entries to the track/paddock, period. When gates do open, you will be directed to your pre-assigned paddock space/pit lane assignment. Tech Inspection and Registration for ChumpCar’s PIR event will start at 12:00pm on Friday, 26 October, and will be conducted in a portion of the parking lot of the nearby by Jantzen Beach RED LION HOTEL ON THE RIVER located at 909 North Hayden Island Drive, Portland, OR 97217, see www.redlionontheriver.com. -

Aerodynamics of Race Cars
AR266-FL38-02 ARI 22 November 2005 19:22 Aerodynamics of Race Cars Joseph Katz Department of Aerospace Engineering, San Diego State University, San Diego, California 92182; email: [email protected] Annu. Rev. Fluid Mech. Key Words 2006. 38:27–63 downforce, inverted wings, ground effect, drag The Annual Review of Fluid Mechanics is online at fluid.annualreviews.org Abstract doi: 10.1146/annurev.fluid. Race car performance depends on elements such as the engine, tires, suspension, 38.050304.092016 road, aerodynamics, and of course the driver. In recent years, however, vehicle aero- Copyright c 2006 by dynamics gained increased attention, mainly due to the utilization of the negative Annual Reviews. All rights lift (downforce) principle, yielding several important performance improvements. reserved This review briefly explains the significance of the aerodynamic downforce and how 0066-4189/06/0115- it improves race car performance. After this short introduction various methods to 0027$20.00 generate downforce such as inverted wings, diffusers, and vortex generators are dis- Annu. Rev. Fluid Mech. 2006.38:27-63. Downloaded from www.annualreviews.org cussed. Due to the complex geometry of these vehicles, the aerodynamic interaction between the various body components is significant, resulting in vortex flows and Access provided by University of Southern California (USC) on 05/14/19. For personal use only. lifting surface shapes unlike traditional airplane wings. Typical design tools such as wind tunnel testing, computational fluid dynamics, and track testing, and their rel- evance to race car development, are discussed as well. In spite of the tremendous progress of these design tools (due to better instrumentation, communication, and computational power), the fluid dynamic phenomenon is still highly nonlinear, and predicting the effect of a particular modification is not always trouble free. -

Mount Clemens Race Track (©2008 by Mount Clemens Public Library
Mount Clemens Public Library Local History Sketches Mount Clemens Race Track (©2008 by Mount Clemens Public Library. All rights reserved.) Aerial view of Mount Clemens Race Track about 1955 shows the lagoon between the ovals ount Clemens Race Track was located on a 55-acre site along North River Road near the I-94 Mfreeway. The property was purchased after World War II by Mount Clemens resident Dr. Clayton T. Stubbs and his wife Ruth, for use as a private pheasant hunting preserve. The land was an old harness racing site, the Clinton Driving Park, which had not been used for racing since about 1925. Dr. Stubbs discovered the old track, which had been erected in 1916 by the Mount Clemens Driving Club, overgrown with brush. About 1950, some local race drivers who were using the track to practice for their races at the Motor City Speedway approached Dr. Stubbs about cleaning up the track and offering races there. Dr. Stubbs agreed to their proposal, and the Mount Clemens Race Track was born. The first public race was offered on September 3, 1951, with 5,000 fans on hand. For years, the raceway attracted crowds for MMSRA stock car races on Sunday nights during the summer (in later years the schedule would change to Thursday and Saturday nights), as well as the occasional crowd-pleasing demolition derby. Grandstands seating 5,500 featured an adjacent picnic and playground area, as Dr. and Mrs. Stubbs wanted their racetrack to provide entertainment for the entire family. The grounds included half-mile and quarter-mile ovals and a figure-eight track. -
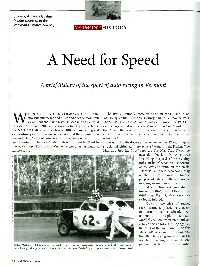
A Need for Speed
Story by Amanda Gustin/ Photos courtesy of the Vermont Historical Society VERMONT HISTORY A Need for Speed A brief history of the sport of auto racing in Vermont HEN YOU PICTURE VERMONT, YOU PROB The first automobile races in Vermont took place in St. ably imagine peace and quiet and bucolic mountain Johnsbury, at the Caledonia County Fair in September 1903. W views-but the state's faster, louder side has a proud The St. Johnsbury Caledonian proudly announced the 1903 fair history too. The year 2017 saw Vermonter Ken Squier elected to as "the largest and best ever held in St. Johnsbury," and noted the NASCAR Hall of Fame's Class of 2018, capping a long and that "one of the new features this year will be automobile races extraordinary career. It is no coi ncidence that the summer Ken consisting of three races, a doctor's race, a county race, and an was inducted, Vermont Governor Phil Scott was out racing, too, open race." and winning in the Late Model division at Thunder Road in It was during the doctor's race, on September 17, that tragedy Barre, Vermont. Racing is in Vermont's blood just as much as struck. "Machine Runs Away at a Vermont Fair, Kill ing One maple syrup. Man and Injuring Two," reported Th e New York Times the ~ -..-.-· r,.,. next day. Dr. John M. Allen was z .. r "recording a speed of nearly fifty ~ r" miles an hour" when he lost control !2 of his car and spun off the track. ~ 0 "Herbert Lamphere, who was riding > ,_~ on the front of the machine for the ~ 0 purpose of balancing the automobile u" z g in going around curves, was thrown against a hitching rail and almost ~ 8 instantly killed." Dr. -

NASA Club Codes and Regulations
3/25/2021 2:24 PM CLUB CODES AND REGULATIONS Ó1989 - 2021 2021.8.3 EDITION © THIS BOOK IS AN OFFICIAL PUBLICATION OF THE NATIONAL AUTO SPORT ASSOCIATION. ALL RIGHTS RESERVED. NOTE- MID-SEASON UPDATES MAY BE PUBLISHED. PLEASE NOTE THE VERSION NUMBER ABOVE. THE CONTENTS OF THIS BOOK ARE THE SOLE PROPERTY OF THE NATIONAL AUTO SPORT ASSOCIATION. NO PORTION OF THIS BOOK MAY BE REPRODUCED IN ANY MANNER, ELECTRONICALLY TRANSMITTED, POSTED ON THE INTERNET, RECORDED BY ANY MEANS, OR STORED ON ANY MAGNETIC / ELECTROMAGNETIC STORAGE SYSTEM(S) WITHOUT THE EXPRESS WRITTEN CONSENT FROM THE NATIONAL EXECUTIVE DIRECTOR OF THE NATIONAL AUTO SPORT ASSOCIATION. NOTE- THE VERSION POSTED ON THE WEBSITE MAY BE PRINTED FOR PERSONAL USE. National Auto Sport Association National Office 7065 A Ann Rd. #130 - 432 Las Vegas, NV 89130 http://www.nasaproracing.com 510-232-NASA 510-277-0657 FAX Author: Jerry Kunzman Editors: Jim Politi and Bruce Leggett ii TABLE OF CONTENTS 1.0 TERMINOLOGY AND DEFINITIONS 3 1.1 Activities 3 1.1.1 High Performance Driving Event (HPDE) 3 1.1.2 Driving School 3 1.1.3 Open Track 3 1.1.4 Competition 3 1.1.5 Time Trial / Time Attack 3 1.1.6 Other NASA Activities 3 1.2 Facility Terminology 4 1.2.1 Racetrack 4 1.2.2 Restricted Area 4 1.2.3 Re-Entry (Head of Pit lane) 4 1.2.4 Hot Pits 4 1.2.5 Paddock / Pre-Grid 4 1.2.6 Cold Pits 4 1.2.7 Pitlane 4 1.2.8 Aerial Photography 4 1.3 Membership Definitions 4 1.3.1 Member 4 1.3.2 Membership – Terms and Conditions 4 1.3.3 Membership - Associate 5 1.3.4 Member Car Club Insurance 5 1.3.5 Membership Renewal -

California Racing Fair Venues
Artist's Rendering of the Alameda County Fair with Turf Course by William Vaughn Willis b California Racing Fair Venues Preserving a Heritage Building for the Future Presented By: The California Authority of Racing Fairs July 2007 Horses Run at the San Joaquin Fair. Racing has been conducted at the San Joaquin Fair since 1860. Contents... 3. Observations on the Future of Northern Front Cover: California Racing The cover showcases a rendering of the 5. Overview of Northern and Southern California Alamenda County Fairgrounds in Racing Fairs Pleasanton wilth a 7/8-mile Turf Course. Northern California Live Racing Fairs 6. San Joaquin Fair Plans are underway to make significant 7. Alameda County Fair improvements to Fair racing venues in 8. Solano County Fair Northern and Southern California. 9. Sonoma County Fair 10. Humboldt County Fair 11. California State Fair Photo Credit: Will Vaughn Willis 12. Big Fresno Fair Racing Venues at Fairgrounds in Southern California 13. Los Angeles County Fair 14. San Diego County Fair 15. California Fairs Satellite Network 16. Fair Satellite Wagering Facilities Some Observations On The Future Of California Racing By Christopher Korby, Execitive Director, Californa Authorioty Of Racing Fairs Introduction ingly or unwillingly, be compelled to consider development Fairs have a grand old tradition of horse racing in of their property for uses other than racing. California going back over 150 years to the days of the Gold The move to develop race track real estate is already Rush. So when pari-mutuel wagering came along in the underway at Bay Meadows. Local observers with whom we early ’30s, the Fairs embraced it like an old friend. -

Racetrack Safety Guidelines
RACETRACK SAFETY GUIDELINES Published by CIRSA 3665 Cherry Creek North Drive Denver, Colorado 80209 800.228.7136 FAX 303.757.8950 www.cirsa.org © CIRSA 2007 Table of Contents I. Introduction 2 II. Location 2 III. Operation, Maintenance & Inspection 3 IV. Event Operation 4 V. Claims Reporting & Investigation 4 VI. Budgeting 4 VII. Release of Liability & Indemnifi cation Agreement 6 VIII. Audit & Inspection Sample Checklists 9 * This publication is meant for informational purposed only, and as with all CIRSA publications, is intended only to assist CIRSA members in their own loss control activities. It is not intended to replace programs and activities, or provide specifi c legal, technical, or other advice. * 1 Introduction Automobile racing in America can be traced back to 1895, when six racers competed in a 54 mile race from Chicago to Evanston, Illinois and back for a $2,000 prize. Through snowy condi- tions, Frank Duryea crossed the fi nish line fi rst with a time of 10 hours and 23 minutes. The love of speed and competition has catapulted the popularity of racing as well as the types of racing to new highs annually. Autos and motorcycles are raced in a gamut of categories and the availability of local facilities draws many participants of all skill levels. Municipalities may own a racing facility, be it a drag strip, road course, or an old airport runway con- verted to a race track in efforts to bring tourism and revenue to the local area. Owning and operating a facility for this high risk activity is normally outside the scope of standard municipal operations, such as water treatment or playground maintenance. -
EUROPEAN FEDERATION of RADIO OPERATED MODEL AUTOMOBILES MEMBERS HANDBOOK 2018 EFRA Handbook 2018 APPENDIX 5 LARGE SCALE I.C
EUROPEAN FEDERATION OF RADIO OPERATED MODEL AUTOMOBILES MEMBERS HANDBOOK 2018 EFRA Handbook 2018 APPENDIX 5 LARGE SCALE I.C. RULES 1. RACE FORMAT 1.1 There will be two annual European Championships to determine the European Champion in: a.) 1:5 Scale Touring Cars and F1 b.) 1:6 Scale Off Road Cars 2WD + 4WD + Short Course c.) 1:5 Scale Touring cars and F1, 40+ Drivers can only enter one class at a European Championship. There will not be a 1:5 touring car European Championship event held in the same year as an IFMAR World Championship event held in Europe, the 4 EFRA GP’s will determine the European Champion in Touring car and Formula 1 with the 3 best results counting. 1.2 The results of the EFRA-GP´s will give the EFRA ranking list. The Ranking list will be a continually updated one, for every new EFRA GP, the oldest one will be deleted. 1.3 The number of drivers per event is limited for GP’s to 110 and for EC’s to 150. There are 2 classes at a GP (TC and F1), in case of more than 110 attendees wants to subscribe the numbers must be limited for each section to 76 TC and 34 F1 = 110 drivers in total. With permission from the Chairman, the track and facilities being suitable, the maximum number of drivers at a GP can be increased. A minimum number of 25 participants from 3 different countries in a class at an EC is required for that class to be officially classified as a European Championship and a European Champion title given to 1st place. -

Turf Track Maintenance
Rails are moved frequently to spread out wear on the turt, Photos courtesy: O.M. Scott & Sons. Turf Hoof marks are Track repaired daily. Maintenance less. Nobody fusses over dirt like the field here's something a little hypnotic municipal golf course to produce the type of crew at a horse race track. The process of about thoroughbred turf track racing. divots that a thoroughbred race can kick up mixing, screening, dragging, rolling, brush- The trance begins slowly, subtly, with in a little more than a minute. T ing, and wetting the dirt is endless. Before colors that catch the eye; the emerald- The rhythmic motion of a full gallop cre- every race, the track surface is loosened green track dotted with the circus-like hues ates an illusion; the thoroughbreds' legs are with a harrow and then dragged smooth. worn by jockeys atop perfect horses walk- moving slowly through a tiny minefield, The rocks that invariably pop up have to be ing, almost floating, to the gate. where chunks of turf are blown into the air collected. But turf, unlike dirt, has to be kept One would expect the spell to break once with each step. If colors and adrenalin the 2,OOO-lbsteeds explode from the gate, induce the trance, it is the gallop, and the alive. High maintenance and the cost it incurs but if anything it intensifies. Both the occa- small explosion of green it causes, which have kept turf tracks something of a rarity in sional fan and the experienced handicap- cement it. Turf racing is sheer delight. -
Geotechnical Investigation Proposed Footbridge Over
GEOTECHNICAL INVESTIGATION PROPOSED FOOTBRIDGE OVER EXISTING TRACK Motoring South West Distribution Record: Revision Reviewed By Date Issued Purpose of Issue Issued To A SM 10/01/2019 Draft for comments Steve Brake Prepared by: Greg Tomasini Signed: Date: 10 January 2019 WML Name: Collie Motorplex Footbridge Additional GI WML Project No: 8318 Date: 10 January 2019 Page i Report Name: 8318-G-R-001.docx About your geotechnical investigation and report…………. A geotechnical investigation is planned and conducted solely for the intended recipient of the report and for the purposes stated in the report. The report should not be reproduced in whole or part without agreement of WML Consultants. A geotechnical investigation is planned and conducted based upon the information about the site and proposed works that is made available to WML Consultants, as stated in the report. A geotechnical investigation typically includes investigation and testing at a few isolated locations. The choice of the locations is usually made by the author having consideration for the nature of the site and proposed works. Conditions for the remainder of the site are necessarily extrapolated from the conditions observed at the locations investigated. Thus the report will contain a mixture of facts, interpretation and professional judgement. Facts will usually be confined to a description of the fieldwork carried out, the observations made and any results of laboratory testing. However, field notes and logs contain estimates of conditions observed at the time, and may differ from the results obtained from subsequent laboratory testing of samples. Other comments and conclusions should be considered as interpretation and professional judgement, unless specifically stated otherwise. -

Disorientation, Dizziness and Postural Imbalance in Race Car Drivers, a Problem in G-Tolerance, Spatial Orientation Or Both
14-1 Disorientation, Dizziness and Postural Imbalance in Race Car Drivers, a Problem in G-Tolerance, Spatial Orientation or Both Frederick E. Guedry, Ph.D., Anil K. Raj, M.D. and Thomas B. Cowin, B.Sc. The Institute for Human and Machine Cognition at the University of West Florida 40 South Alcaniz Street Pensacola, FL 32501 USA [email protected], [email protected] and [email protected] Abstract. On April 28, 2001, Championship Auto Racing Teams (CART) drivers reported experiences of disorientation, dizziness, nausea and blurred vision during practice trials on the Texas Motor Speedway (TMS). Following the practice trials, there were reports of postural imbalance. As a result, the Firestone Firehawk 600 race scheduled for Sunday April 29 was cancelled,; the first time in auto racing history that concerns about driver intolerance to G forces caused a cancellation. The four drivers who did not experience problems had completed less than 20 laps (drive time of 8 min) whereas those reporting symptoms had driven on the track for more than 8 min. Using track data (maximum average speed in qualifying laps, radius of turns, bank angle of turns), we have calculated the magnitudes of ‘gravito-inertial forces” experienced by drivers on a number of speedways in the US. This reveals that drivers experience high G, particularly lateral G (Gy) on most speedways. Other tracks, eg., Dover Motor Speedway, also have steep banks and relatively small-radius turns, but have been raced at lower speeds. Some have banked turns that are steeper than the TMS turns. Calculated G-loads were greatest on the TMS, due to 220-250 mph car speeds.