Study of Astronomical and Geodetic Series Using the Allan Variance 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Anton Pannekoek: Ways of Viewing Science and Society
STUDIES IN THE HISTORY OF KNOWLEDGE Tai, Van der Steen & Van Dongen (eds) Dongen & Van Steen der Van Tai, Edited by Chaokang Tai, Bart van der Steen, and Jeroen van Dongen Anton Pannekoek: Ways of Viewing Science and Society Ways of Viewing ScienceWays and Society Anton Pannekoek: Anton Pannekoek: Ways of Viewing Science and Society Studies in the History of Knowledge This book series publishes leading volumes that study the history of knowledge in its cultural context. It aspires to offer accounts that cut across disciplinary and geographical boundaries, while being sensitive to how institutional circumstances and different scales of time shape the making of knowledge. Series Editors Klaas van Berkel, University of Groningen Jeroen van Dongen, University of Amsterdam Anton Pannekoek: Ways of Viewing Science and Society Edited by Chaokang Tai, Bart van der Steen, and Jeroen van Dongen Amsterdam University Press Cover illustration: (Background) Fisheye lens photo of the Zeiss Planetarium Projector of Artis Amsterdam Royal Zoo in action. (Foreground) Fisheye lens photo of a portrait of Anton Pannekoek displayed in the common room of the Anton Pannekoek Institute for Astronomy. Source: Jeronimo Voss Cover design: Coördesign, Leiden Lay-out: Crius Group, Hulshout isbn 978 94 6298 434 9 e-isbn 978 90 4853 500 2 (pdf) doi 10.5117/9789462984349 nur 686 Creative Commons License CC BY NC ND (http://creativecommons.org/licenses/by-nc-nd/3.0) The authors / Amsterdam University Press B.V., Amsterdam 2019 Some rights reserved. Without limiting the rights under copyright reserved above, any part of this book may be reproduced, stored in or introduced into a retrieval system, or transmitted, in any form or by any means (electronic, mechanical, photocopying, recording or otherwise). -
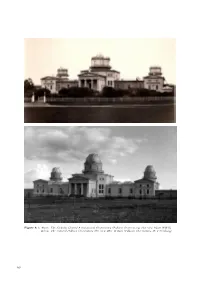
(Pulkovo Observatory) (The View Before WWII) Below: the Restored Pulkovo Observatory (The View After WWII) (Pulkovo Observatory, St
Figure 6.1: Above: The Nicholas Central Astronomical Observatory (Pulkovo Observatory) (the view before WWII) Below: The restored Pulkovo Observatory (the view after WWII) (Pulkovo Observatory, St. Petersburg) 60 6. The Pulkovo Observatory on the Centuries’ Borderline Viktor K. Abalakin (St. Petersburg, Russia) in Astronomy” presented in 1866 to the Saint-Petersburg Academy of Sciences. The wide-scale astrophysical studies were performed at Pulkovo Observatory around 1900 during the directorship of Theodore Bredikhin, Oscar Backlund and Aristarchos Be- lopolsky. The Nicholas Central Astronomical Observatory at Pulkovo, now the Central (Pulkovo) Astronomical Observatory of the Russian Academy of Sciences, had been co-founded by Friedrich Georg Wilhelm Struve (1793–1864) [Fig. 6.2] together with the All-Russian Emperor Nicholas the First [Fig. 6.3] and inaugurated in 1839. The Observatory had been erected on the Pulkovo Heights (the Pulkovo Hill) near Saint-Petersburg in ac- cordance with the design of Alexander Pavlovich Brül- low, [Fig. 6.3] the well-known architect of the Russian Empire. [Fig. 6.4: Plan of the Observatory] From the very beginning, the traditional field of re- search work of the Observatory was Astrometry – i. e. determination of precise coordinates of stars from the observations and derivation of absolute star catalogues for the epochs of 1845.0, 1865.0 and 1885.0 (the later catalogues were derived for epochs of 1905.0 and 1930.0); they contained positions of 374 through 558 bright, so- called fundamental, stars. It is due to these extraordi- Figure 6.2: Friedrich Georg Wilhelm (Vasily Yakovlevich) narily precise Pulkovo catalogues that Benjamin Gould Struve (1793–1864), director 1834 to 1862 had called the Pulkovo Observatory the “astronomical (Courtesy of Pulkovo Observatory, St. -

Observations of the Satellites of the Major Planets at Pulkovo Observatory: History and Present N
Astronomy and Astrophysics in the Gaia sky Proceedings IAU Symposium No. 330, 2017 A. Recio-Blanco, P. de Laverny, A.G.A. Brown c International Astronomical Union 2018 & T. Prusti, eds. doi:10.1017/S1743921317005737 Observations of the satellites of the major planets at Pulkovo Observatory: history and present N. A. Shakht, A. V. Devyatkin, D. L. Gorshanov and M. S. Chubey Central (Pulkovo) Observatory RAS, St- Petersburg 196140, Russia email: [email protected] Abstract. In connection with long on-orbit European space satellite Gaia and the opportunity that now provides ESA, to use the results of observations of the space telescope, we would like to present some results of our long-term observations of the major planets satellites at Pulkovo Observatory. We hope to translate into reality these opportunities, namely the use of new observations and new ephemeris and a practical possibility of a new reduction for modern and old observations. The essential facilities can appear in the space, we give the shortest presentation of space project Orbital Stellar Stereoscopic Observatory. Keywords. natural satellites of great planets, observations, space project OStSO The astrometric positional observations of the major planets and their satellites started almost since the foundation of Pulkovo observatory. The first photographic observations made with Pulkovo Normal Astrograph (PNA) since 1894 yr and continued during one hundred years. Now we have about 6500 plates with the bodies of the Solar System from of total quantity 48 000 plates collected in Pulkovo glass library. The most positions and the list of publications took place in our database www.puldb.ru which is updated. -

Proper Motions and CCD-Photometry of Stars in the Region of the Open Cluster NGC 1513
A&A 396, 125–130 (2002) Astronomy DOI: 10.1051/0004-6361:20021363 & c ESO 2002 Astrophysics Proper motions and CCD-photometry of stars in the region of the open cluster NGC 1513 V. N . F rolov 1, E. G. Jilinski1,2,J.K.Ananjevskaja1,E.V.Poljakov1, N. M. Bronnikova1, and D. L. Gorshanov1 1 The Main Astronomical Observatory, Pulkovo, St. Petersburg, Russia 2 Laborat´orio Nacional de Computa¸c˜ao Cient´ıfica / MCT, Petr´opolis, RJ, Brazil Received 3 July 2002 / Accepted 10 September 2002 Abstract. The results of astrometric and photometric investigations of the poorly studied open cluster NGC 1513 are presented. The proper motions of 333 stars with a root-mean-square error of 1.9masyr−1 were obtained by means of the automated measuring complex “Fantasy”. Eight astrometric plates covering the time interval of 101 years were measured and a total of 141 astrometric cluster members identified. BV CCD-photometry was obtained for stars in an area 17 × 17 centered on the cluster. Altogether 33 stars were considered to be cluster members with high reliability by two criteria. The estimated age of NGC 1513 is 2.54 × 108 years. Key words. open clusters and associations: general – open clusters and associations: individual: NGC 1513 1. Introduction Table 1. Astrometric plates. Plate Exposure Epoch Quality The open cluster NGC 1513 is located in the Perseus constella- (min) tion. Its equatorial and galactic coordinates are: Early epoch A 371 unknown 1899 Nov. 30 good = h m s =+ ◦ = ◦ = − ◦ α 4 09 98 , δ 49 31 ; 152.6, b 1.57 (2000.0). -

Lick Observatory Records: Photographs UA.036.Ser.07
http://oac.cdlib.org/findaid/ark:/13030/c81z4932 Online items available Lick Observatory Records: Photographs UA.036.Ser.07 Kate Dundon, Alix Norton, Maureen Carey, Christine Turk, Alex Moore University of California, Santa Cruz 2016 1156 High Street Santa Cruz 95064 [email protected] URL: http://guides.library.ucsc.edu/speccoll Lick Observatory Records: UA.036.Ser.07 1 Photographs UA.036.Ser.07 Contributing Institution: University of California, Santa Cruz Title: Lick Observatory Records: Photographs Creator: Lick Observatory Identifier/Call Number: UA.036.Ser.07 Physical Description: 101.62 Linear Feet127 boxes Date (inclusive): circa 1870-2002 Language of Material: English . https://n2t.net/ark:/38305/f19c6wg4 Conditions Governing Access Collection is open for research. Conditions Governing Use Property rights for this collection reside with the University of California. Literary rights, including copyright, are retained by the creators and their heirs. The publication or use of any work protected by copyright beyond that allowed by fair use for research or educational purposes requires written permission from the copyright owner. Responsibility for obtaining permissions, and for any use rests exclusively with the user. Preferred Citation Lick Observatory Records: Photographs. UA36 Ser.7. Special Collections and Archives, University Library, University of California, Santa Cruz. Alternative Format Available Images from this collection are available through UCSC Library Digital Collections. Historical note These photographs were produced or collected by Lick observatory staff and faculty, as well as UCSC Library personnel. Many of the early photographs of the major instruments and Observatory buildings were taken by Henry E. Matthews, who served as secretary to the Lick Trust during the planning and construction of the Observatory. -

The Pulkovo Observatory Library Develops Electronic Services
Library and Information Services in Astronomy IV July 2-5, 2002, Prague, Czech Republic B. Corbin, E. Bryson, and M. Wolf (eds) The Pulkovo Observatory Library Develops Electronic Services Natalia Markova Pulkovo Observatory Library, 65 Pulkovo, 196140 St-Petersburg, Russia [email protected] Abstract. Based on the \Struve Fund", the Pulkovo Observatory lib- rary is working on a new electronic catalogue. The existing printed cata- logue was created in the 19th century and does not reflect the present due to losses incurred during WWII and the fire of 1997. The Pulkovo Observatory library started an electronic catalogue comprised of publications about the institution. This catalogue will in- clude bibliographic descriptions of the literature we house, as well as pictures and photos. We consider placing the catalogue on a web site important because we receive many requests for this type of information from around the world. 1. Introduction The Pulkovo Observatory library needs a new electronic catalogue that will reflect a modern state of funds formed from the fifteenth through the eighteenth centuries, the period when Wilhelm and Otto Struve were directors. These funds were described in printed catalogs in 1845, 1860 and 1880. Due to the Second World War and a fire in 1997, many parts of the collection were damaged beyond redemption. Thus, the librarians have decided to create an electronic catalog based on subject divisions that will be the most in demand. 2. The Corpus of the Catalog The corpus of the catalog was created in the 1930s and 40s. During this time, jubilee speeches, obituaries, and other materials about the Observatory and its scientific staff were collected. -
Presentation
1839 - 2014 Central Astronomical Observatory at Pulkovo The Russian Emperor Nicholas the First (Nikolai Pavlovich Romanov) Architect Alexander Brüllow (1798-1877) with designs of the Observatory Худ. А.И.Клиндер, бумага, акв.,1840. Гос. музей А.С.Пушкина The first director of the Pulkovo Observatory Friedrich Georg Wilhelm (Vassily Yakovlevich) Struve (1793-1864) Artist Jensen, 1841 Pulkovo Astronomical Museum The main transit instruments of the Pulkovo Observatory Traugott Leberecht Ertel The Large transit instrument of Ertel-Struve (1778-1858) (D = 150 mm, F = 2590 mm) and the Large vertical circle of Ertel-Struve Artist M.Echter, 1838 (D = 150 mm, F = 1960 mm) The main transit instruments of the Pulkovo Observatory The Repsold Brothers Adolf (1806-1871) and Georg (1804-1885) The Repsold Meridian Circle and the Repsold Vertical Circle Artist Jensen, 1840 Pulkovo Astronomical Museum The world largest (at that time) 30-inch Refractor manufactured by the Clarks The outstanding Russian astrophysicist Acad. Aristarchos Belopolsky The general view of the Main Building of the Pulkovo Observatory from the balcony of the 30-inch Great Refractor Pavilion (end of XIX cy.) The Main Building of the Pulkovo Observatory Second half of the XIX cy. Two southern branches of Pulkovo Observatory Simeiz Observatory was found by N.S. Mal’tsov in 1900. In 1908 he donated it to the Pulkovo Observatory Since 1912 it was one of the Southern departments of Pulkovo Observatory Nikolaev Astronomical Observatory is the oldest naval observatory in the South-Eastern Europe, founded in 1821 by admiral A.S. Greig for needs of the Black Sea Navy. -

The Development of the Classical Observatory: from a Functional Shelter for the Telescope to the Temple of Science
ActaTapio Baltica Markkanen Historiae et Philosophiae Scientiarum Vol. 1, No. 2 (Autumn 2013) DOI: 10.11590/abhps.2013.2.04 The Development of the Classical Observatory: From a Functional Shelter for the Telescope to the Temple of Science Tapio Markkanen University of Helsinki Haltijatontuntie 4 A4, Espoo 02200, Finland E-mail: [email protected] Abstract: At the end of the 18th century and at the beginning of the 19th century, observatory buildings underwent a change, because astronomical tools of observation had transformed from light portable equipment into permanently mounted accurate instruments. For positional astronomy, observations were mainly carried out in the meridian or in the prime vertical. A new type of telescope, the equatorially mounted refractor was adopted for the observation of objects such as planets, comets and double stars. The new instruments and methods of observation also required new approaches to observatory design. The new research needs began to determine the exterior, structure and functions of the observatory building. At the beginning of the 19th century, new standards of observatory planning were developed for the construction of the new observatories of Tartu, Helsinki and Pulkovo. Over many decades, the adopted design principles guided the construction and architecture of avant-garde observatories around the world. They also provided for the archetype of the observatory as a universal emblem for science well into the 20th century. The article discusses the development stages of these design principles and their global impacts. Keywords: astronomical instruments, history of astronomy, methods of observation, observatories 38 Acta Baltica Historiae et Philosophiae Scientiarum Vol. 1, No. -

Otto Struve Papers, 1837-1966(Bulk 1953-1956)BANC MSS 81/35 C
http://oac.cdlib.org/findaid/ark:/13030/kt8t1nc7t3 No online items Guide to the Otto Struve Papers, 1837-1966(bulk 1953-1956)BANC MSS 81/35 c Processed by Josue Hurtado The Bancroft Library © 2003 The Bancroft Library University of California Berkeley, CA 94720-6000 [email protected] URL: http://www.lib.berkeley.edu/libraries/bancroft-library Guide to the Otto Struve Papers, BANC MSS 81/35 c 1 1837-1966(bulk 1953-1956)BANC MSS 81/35 c Language of Material: English Contributing Institution: The Bancroft Library Title: Otto Struve papers Creator: Struve, Otto, 1897-1963 Identifier/Call Number: BANC MSS 81/35 c Physical Description: 5 Linear FeetNumber of containers: (4 cartons); Linear feet: 5.0 Date (inclusive): 1837-1966 Date (bulk): (bulk 1953-1956) Abstract: Correspondence, most of it prior to Struve's service in the Dept. of Astronomy, University of California, biographical materials, bibliographies of his writings, photographs, and some papers relating to various members of the Struve family. Also includes materials concerning his interest and activity in astronomy while at U.C. Berkeley and the International Astronomical Union. For current information on the location of these materials, please consult the Library's online catalog. Language of Material: English Access Collection is open for research. Publication Rights Copyright has not been assigned to The Bancroft Library. All requests for permission to publish or quote from manuscripts must be submitted in writing to the Head of Public Services. Permission for publication is given on behalf of The Bancroft Library as the owner of the physical items and is not intended to include or imply permission of the copyright holder, which must also be obtained by the reader. -

Investigations of Asteroids in Pulkovo Observatory
INVESTIGATIONS OF ASTEROIDS IN PULKOVO OBSERVATORY A.V. DEVYATKIN, D.L. GORSHANOV, V.N. L'VOV, S.D. TSEKMEISTER, S.N. PETROVA, A.A. MARTYUSHEVA, V.Y. SLESARENKO, K.N. NAUMOV, I.A. SOKOVA, E.N. SOKOV, S.V. ZINOVIEV, S.V. KARASHEVICH, A.V. IVANOV, A.Y. LYASHENKO, S.A. RUSOV, V.V. KOUPRIANOV, E.A. BASHAKOVA, A.V. MELNIKOV Central Astronomical Observatory at Pulkovo of Russian Academy of Sciences 65 Pulkovskoe Sh., 196140, St. Petersburg, Russia e-mail: [email protected] ABSTRACT. Observational Astrometry Laboratory and Ephemeris Provision Sector of Pulkovo Obser- vatory carry out a joint multipurpose research on asteroids belonging to various groups. Astrometric and photometric observations are done using ZA{320M and MTM{500M telescopes located at Pulkovo and in Northern Caucasus mountains, correspondingly. We obtain lightcurves that allow us to determine spin parameters and shapes of asteroids. Their color indices and taxonomy classes are derived from wideband ¯lter observations. Improvement of asteroid orbits is achieved by doing positional measurements. Orbital evolution of asteroids is modelled, taking into account also non-gravity forces, including light pressure and Yarkovsky e®ect. NEAs, as well as binary asteroids, take an important place in our investigations. Quasi-satellites of Venus, Earth, and Mars are new targets of our research, one of the examples being 2012 DA14 that approached Earth in early 2013; many MTM{500M observations of this asteroid were obtained around the date of approach. 1. TELESCOPES Observational Astrometry Laboratory of Pulkovo Observatory carries out observations with two small robotic telescopes. ZA{320M (D = 32 cm, F = 320 cm) is installed at Pulkovo observatory (Saint Petersburg). -

Pulkovo Observatory
PULKOVO OBSERVATORY Olga Tsiopa St.-Petersburg, Russia Introduction Pulkovo observatory (as it is usually called after the name of a small village that was situated nearby) is officially named in Russian documents as the Main ( in Russian it sounds as ‘Glavnaja”) Astronomical observatory of the Russian Academy of Sciences. The abbreviation is GAO RAN. In English it is traditionally named as The Central Astronomical observatory of the Russian Academy of Sciences.. It is situated on 70m hill 15 kilometers from St.-Petersburg. Brief Information Pulkovo Observatory was organized in 1839. It used to be called the astronomical capital of the world because of an exceptional precision of astrometrical observations. The official name now is the Main Astronomical Observatory of the Russian Academy of Sciences (GAO RAN) History According to a special order of the Russian tsar Nickolay the I Pulkovo observatory was founded in 1839. That time St.- Petersburg was the capital of Russia.. Professor W.F.Struve (1793-1864) from Tartu university was invited to become the director. A lot of money was given to the observatory. The beautiful building was constructed after the design of one of the best Russian architects Pulkovo observatory in 1855 Brullov. Astronomical capital of the world Never later in Russia (or Soviet Union) history astronomers were paid better. Good quality instruments were used for precise determination of the coordinates of heavenly bodies in order to compile star catalogues for geographical exploration of our vast country and the derivation of the most important astronomical constants. The observations held at Pulkovo were so precise, that for some time European astronomers preferred to use Pulkovo meridian better than the Greenwich one. -

Telescopes and the Popularization of Astronomy in the Twentieth Century Gary Leonard Cameron Iowa State University
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2010 Public skies: telescopes and the popularization of astronomy in the twentieth century Gary Leonard Cameron Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the History Commons Recommended Citation Cameron, Gary Leonard, "Public skies: telescopes and the popularization of astronomy in the twentieth century" (2010). Graduate Theses and Dissertations. 11795. https://lib.dr.iastate.edu/etd/11795 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Public skies: telescopes and the popularization of astronomy in the twentieth century by Gary Leonard Cameron A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: History of Science and Technology Program of study committee: Amy S. Bix, Major Professor James T. Andrews David B. Wilson John Monroe Steven Kawaler Iowa State University Ames, Iowa 2010 Copyright © Gary Leonard Cameron, 2010. All rights reserved. ii Table of Contents Forward and Acknowledgements iv Dissertation Abstract v Chapter I: Introduction 1 1. General introduction 1 2. Research methodology 8 3. Historiography 9 4. Popularization – definitions 16 5. What is an amateur astronomer? 19 6. Technical definitions – telescope types 26 7. Comparison with other science & technology related hobbies 33 Chapter II: Perfecting ‘A Sharper Image’: the Manufacture and Marketing of Telescopes to the Early 20th Century 39 1.