High Resolution Measurement of Levee Subsidence Related to Energy Infrastructure in the Sacramento-San Joaquin Delta
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
0 5 10 15 20 Miles Μ and Statewide Resources Office
Woodland RD Name RD Number Atlas Tract 2126 5 !"#$ Bacon Island 2028 !"#$80 Bethel Island BIMID Bishop Tract 2042 16 ·|}þ Bixler Tract 2121 Lovdal Boggs Tract 0404 ·|}þ113 District Sacramento River at I Street Bridge Bouldin Island 0756 80 Gaging Station )*+,- Brack Tract 2033 Bradford Island 2059 ·|}þ160 Brannan-Andrus BALMD Lovdal 50 Byron Tract 0800 Sacramento Weir District ¤£ r Cache Haas Area 2098 Y o l o ive Canal Ranch 2086 R Mather Can-Can/Greenhead 2139 Sacramento ican mer Air Force Chadbourne 2034 A Base Coney Island 2117 Port of Dead Horse Island 2111 Sacramento ¤£50 Davis !"#$80 Denverton Slough 2134 West Sacramento Drexler Tract Drexler Dutch Slough 2137 West Egbert Tract 0536 Winters Sacramento Ehrheardt Club 0813 Putah Creek ·|}þ160 ·|}þ16 Empire Tract 2029 ·|}þ84 Fabian Tract 0773 Sacramento Fay Island 2113 ·|}þ128 South Fork Putah Creek Executive Airport Frost Lake 2129 haven s Lake Green d n Glanville 1002 a l r Florin e h Glide District 0765 t S a c r a m e n t o e N Glide EBMUD Grand Island 0003 District Pocket Freeport Grizzly West 2136 Lake Intake Hastings Tract 2060 l Holland Tract 2025 Berryessa e n Holt Station 2116 n Freeport 505 h Honker Bay 2130 %&'( a g strict Elk Grove u Lisbon Di Hotchkiss Tract 0799 h lo S C Jersey Island 0830 Babe l Dixon p s i Kasson District 2085 s h a King Island 2044 S p Libby Mcneil 0369 y r !"#$5 ·|}þ99 B e !"#$80 t Liberty Island 2093 o l a Lisbon District 0307 o Clarksburg Y W l a Little Egbert Tract 2084 S o l a n o n p a r C Little Holland Tract 2120 e in e a e M Little Mandeville -

Desilva Island
SUISUN BAY 139 SUISUN BAY 140 SUISUN BAY SUISUN BAY Located immediately downstream of the confluence of the Sacramento and San Joaquin Rivers, Suisun Bay is the largest contiguous wetland area in the San Francisco Bay region. Suisun Bay is a dynamic, transitional zone between the freshwater input of the Central Valley rivers and the tidal influence of the upper San Francisco Estuary. This area supports a substantial number of nesting herons and egrets, including three of the largest colonies in the region. Although suburban development is rampant along the nearby Interstate 80 corridor to the north, most of the Suisun Bay area is protected from heavy development by the California Department of Fish and Game and a number of private duck clubs. Black- Active Great crowned or year Site Blue Great Snowy Night- Cattle last # Colony Site Heron Egret Egret Heron Egret County active Page 501 Bohannon Solano Active 142 502 Campbell Ranch Solano Active 143 503 Cordelia Road Solano 1998 145 504 Gold Hill Solano Active 146 505 Green Valley Road Solano Active 148 506 Hidden Cove Solano Active 149 507 Joice Island Solano 1994 150 508 Joice Island Annex Solano Active 151 509 Sherman Lake Sacramento Active 152 510 Simmons Island Solano 1994 153 511 Spoonbill Solano Active 154 512 Tree Slough Solano Active 155 513 Volanti Solano Active 156 514 Wheeler Island Solano Active 157 SUISUN BAY 141 142 SUISUN BAY Bohannon Great Blue Herons and Great Egrets nest in a grove of eucalyptus trees on a levee in Cross Slough, about 1.8 km east of Beldons Landing. -

Suisun Marsh Protection Plan Map (PDF)
Proposed County Parks (Hill Slough, Fairfield Beldon’s Landing) Develop passive recreation facilities compatible with Marsh protection (e.g. fishing, picnicking, hiking, nature study.) Boat launching ramp may be constructed Suis nu at Beldon’s Landing. City Suisun Marsh 8 0 etaterstnI 80 a Protection Plan Map flHighway 12 San Francisco Bay Conservation (6) b .J ' and Development Commission I Denverton (7) I December 1976 ) I ~4 Slough Thomasson Shiloh Primary Management Area danyor, Potrero Hills ':__. .---) ... .. ... ~ . _,,. - (8) Secondary Management Area ~ ,. .,,,, Denverton ,,a !\.:r ~ Water-Related Industry Reserve Area c Beldon’s BRADMOOR ISLAND Slough (5) Landing t +{larl!✓' Road Boundary of Wildlife Areas and (9) Ecological Reserves Little I Honker (1) Grizzly Island Unit (9) Bay (2) Crescent Unit (4) Montezuma Slough (3) Island Slough Unit JOICE ISLAND (3) r (4) Joice Island Unit (5) Rush Ranch National Estuarine (10) Ecological Reserve Kirby Hill (6) Hill Slough Wildlife Area Suisun (7) Peytonia Slough Ecological Reserve (8) Grey Goose Unit GRIZZLY ISLAND (2) GRIZZLY ISLAND (9) Gold Hills Unit (10) Garibaldi Unit (11) West Family Unit (12) Goodyear Slough Unit Benicia Area Recommended for Aquisition a. Lawler Property I (11) Hills b. Bryan Property . ~-/--,~ c. Smith Property ,,-:. ...__.. ,, \ 1 Collinsville: Reserve seasonal marshes and Benicia Hills lowland grasslands for their Amended 2011 Grizzly Bay intrinsic value to marsh wildlife and Steep slopes with high landslide and soil to act as the buffer between the erosion potentials. Active fault location. Land (1) Marsh and any future water-related Collinsville Road use practices should be controlled to prevent uses to the east. -
Setback Levee and Habitat Restoration Project on Twitchell Island Project Goals: 1
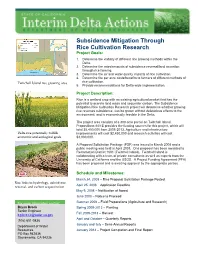
Subsidence Mitigation Through Rice Cultivation Research Project Goals: 1. Determine the viability of different rice growing methods within the Delta. 2. Determine the rates/amounts of subsidence reversal/land accretion through rice farming. 3. Determine the air and water quality impacts of rice cultivation. 4. Determine the per acre costs/benefits to farmers of different methods of Twitchell Island rice growing area rice cultivation. 5. Provide recommendations for Delta-wide implementation. Project Description: Rice is a wetland crop with an existing agricultural market that has the potential to accrete land mass and sequester carbon. The Subsidence Mitigation Rice Cultivation Research project will determine whether growing rice reverses subsidence, can be grown without deleterious effects to the environment, and is economically feasible in the Delta. The project area consists of a 300 acre parcel on Twitchell Island. Propositions 84/1E provides the funding sources for this project, which will total $5,450,000 from 2008-2013. Agriculture and infrastructure Delta rice potentially fulfills improvements will cost $2,450,000 and research activities will cost economic and ecological goals $3,000,000. A Proposal Solicitation Package (PSP) was issued in March 2008 and a public meeting was held in April 2008. One proposal has been awarded to Reclamation District 1601 (Twitchell Island). Twitchell Island is collaborating with a team of private consultants as well as experts from the University of California and the USGS. A Project Funding Agreement -

Workshop Report—Earthquakes and High Water As Levee Hazards in the Sacramento-San Joaquin Delta
Workshop report—Earthquakes and High Water as Levee Hazards in the Sacramento-San Joaquin Delta Delta Independent Science Board September 30, 2016 Summary ......................................................................................................................................... 1 Introduction ..................................................................................................................................... 1 Workshop ........................................................................................................................................ 1 Scope ........................................................................................................................................... 1 Structure ...................................................................................................................................... 2 Participants and affiliations ........................................................................................................ 2 Highlights .................................................................................................................................... 3 Earthquakes ............................................................................................................................. 3 High water ............................................................................................................................... 4 Perspectives.................................................................................................................................... -

UC Davis San Francisco Estuary and Watershed Science
UC Davis San Francisco Estuary and Watershed Science Title Implications for Greenhouse Gas Emission Reductions and Economics of a Changing Agricultural Mosaic in the Sacramento–San Joaquin Delta Permalink https://escholarship.org/uc/item/99z2z7hb Journal San Francisco Estuary and Watershed Science, 15(3) ISSN 1546-2366 Authors Deverel, Steven Jacobs, Paul Lucero, Christina et al. Publication Date 2017 DOI 10.15447/sfews.2017v15iss3art2 License https://creativecommons.org/licenses/by/4.0/ 4.0 Peer reviewed eScholarship.org Powered by the California Digital Library University of California SEPTEMBER 2017 RESEARCH Implications for Greenhouse Gas Emission Reductions and Economics of a Changing Agricultural Mosaic in the Sacramento – San Joaquin Delta Steven Deverel1, Paul Jacobs2, Christina Lucero1, Sabina Dore1, and T. Rodd Kelsey3 profit changes relative to the status quo. We spatially Volume 15, Issue 3 | Article 2 https://doi.org/10.15447/sfews.2017v15iss3art2 assigned areas for rice and wetlands, and then allowed the Delta Agricultural Production (DAP) * Corresponding author: [email protected] model to optimize the allocation of other crops to 1 HydroFocus, Inc. maximize profit. The scenario that included wetlands 2827 Spafford Street, Davis, CA 95618 USA decreased profits 79% relative to the status quo but 2 University of California, Davis -1 One Shields Ave, Davis, CA 95616 USA reduced GHG emissions by 43,000 t CO2-e yr (57% 3 The Nature Conservancy reduction). When mixtures of rice and wetlands were 555 Capitol Mall Suite 1290, Sacramento, CA 95814 USA introduced, farm profits decreased 16%, and the GHG -1 emission reduction was 33,000 t CO2-e yr (44% reduction). -

Historic, Recent, and Future Subsidence, Sacramento-San Joaquin Delta, California, USA
UC Davis San Francisco Estuary and Watershed Science Title Historic, Recent, and Future Subsidence, Sacramento-San Joaquin Delta, California, USA Permalink https://escholarship.org/uc/item/7xd4x0xw Journal San Francisco Estuary and Watershed Science, 8(2) ISSN 1546-2366 Authors Deverel, Steven J Leighton, David A Publication Date 2010 DOI https://doi.org/10.15447/sfews.2010v8iss2art1 Supplemental Material https://escholarship.org/uc/item/7xd4x0xw#supplemental License https://creativecommons.org/licenses/by/4.0/ 4.0 Peer reviewed eScholarship.org Powered by the California Digital Library University of California august 2010 Historic, Recent, and Future Subsidence, Sacramento-San Joaquin Delta, California, USA Steven J. Deverel1 and David A. Leighton Hydrofocus, Inc., 2827 Spafford Street, Davis, CA 95618 AbStRACt will range from a few cm to over 1.3 m (4.3 ft). The largest elevation declines will occur in the central To estimate and understand recent subsidence, we col- Sacramento–San Joaquin Delta. From 2007 to 2050, lected elevation and soils data on Bacon and Sherman the most probable estimated increase in volume below islands in 2006 at locations of previous elevation sea level is 346,956,000 million m3 (281,300 ac-ft). measurements. Measured subsidence rates on Sherman Consequences of this continuing subsidence include Island from 1988 to 2006 averaged 1.23 cm year-1 increased drainage loads of water quality constitu- (0.5 in yr-1) and ranged from 0.7 to 1.7 cm year-1 (0.3 ents of concern, seepage onto islands, and decreased to 0.7 in yr-1). Subsidence rates on Bacon Island from arability. -

550. Regulations for General Public Use Activities on All State Wildlife Areas Listed
550. Regulations for General Public Use Activities on All State Wildlife Areas Listed Below. (a) State Wildlife Areas: (1) Antelope Valley Wildlife Area (Sierra County) (Type C); (2) Ash Creek Wildlife Area (Lassen and Modoc counties) (Type B); (3) Bass Hill Wildlife Area (Lassen County), including the Egan Management Unit (Type C); (4) Battle Creek Wildlife Area (Shasta and Tehama counties); (5) Big Lagoon Wildlife Area (Humboldt County) (Type C); (6) Big Sandy Wildlife Area (Monterey and San Luis Obispo counties) (Type C); (7) Biscar Wildlife Area (Lassen County) (Type C); (8) Buttermilk Country Wildlife Area (Inyo County) (Type C); (9) Butte Valley Wildlife Area (Siskiyou County) (Type B); (10) Cache Creek Wildlife Area (Colusa and Lake counties), including the Destanella Flat and Harley Gulch management units (Type C); (11) Camp Cady Wildlife Area (San Bernadino County) (Type C); (12) Cantara/Ney Springs Wildlife Area (Siskiyou County) (Type C); (13) Cedar Roughs Wildlife Area (Napa County) (Type C); (14) Cinder Flats Wildlife Area (Shasta County) (Type C); (15) Collins Eddy Wildlife Area (Sutter and Yolo counties) (Type C); (16) Colusa Bypass Wildlife Area (Colusa County) (Type C); (17) Coon Hollow Wildlife Area (Butte County) (Type C); (18) Cottonwood Creek Wildlife Area (Merced County), including the Upper Cottonwood and Lower Cottonwood management units (Type C); (19) Crescent City Marsh Wildlife Area (Del Norte County); (20) Crocker Meadow Wildlife Area (Plumas County) (Type C); (21) Daugherty Hill Wildlife Area (Yuba County) -

Municipal Water Quality Investigations Program History and Studies 1983—2012
State of California The Resources Agency Department of Water Resources Municipal Water Quality Investigations Program History and Studies 1983—2012 November 2013 Edmund Brown Jr. John Laird Mark W. Cowin Governor Secretary for Resources Director State of California The Resources Agency Department of Water Resources State of California Edmund G. Brown Jr., Governor California Natural Resources Agency John Laird, Secretary for Natural Resources Department of Water Resources Mark W. Cowin, Director Laura King Moon, Chief Deputy Director Office of the Chief Counsel Public Affairs Office Security Operations Cathy Crothers Nancy Vogel, Ass't Dir. Sonny Fong Gov't & Community Liaison Policy Advisor Legislative Affairs Office Kimberly Johnston~ Dodds Waiman Yip Kasey Schimke, Ass't Dir. Deputy Directors Paul Helliker Delta and Statewide Water Management Gary Bardini Integrated Water Management Carl Torgersen State Water Project John Pacheco California Energy Resources Scheduling Kathie Kishaba Business Operations Division of Environmental Services Dean F. Messer, Chief Office of Water Quality Stephani Spaar, Chief Municipal Water Quality Program Branch Municipal Water Quality Investigations Section Cindy Garcia, Chief Rachel Pisor, Chief Ofelia Bogdan, Staff Services Analyst Prepared By Sonia Miller, Project Leader Otome J. Lindsey Foreword The Sacramento-San Joaquin Delta (Delta) is a major source of drinking water for 25 million people of the State of California. Therefore, the quality of Delta water is an important consideration for its use as a drinking water source. However, Delta water quality may be degraded by a variety of sources and environmental factors. Close monitoring of Delta waters is necessary to ensure delivery of high quality source waters to urban water suppliers. -

C a S E S T U D Y R E P O R T Sherman Island Delta
C A S E S T U D Y R E P O R T SHERMAN ISLAND DELTA PROJECT November 2013 Written by Bradley Angell, Richard Fisher & Ryan Whipple a project of Ante Meridiem Incorporated with the direct support of the Delta Alliance International Foundation © 2013 Ante Meridiem Incorporated ABSTRACT This report is an official beginning to a model design for Sherman Island, an important land mass that lies at the meeting point of the Sacramento and San Joaquin Rivers of the California Delta system. As design is typically dominated by a particular driving discipline or a paramount policy concern, the resulting decision-making apparatus is normally governed by that discipline or policy. After initial review of Sherman Island, such a “single” discipline or “principle” policy approach is not appropriate for Sherman Island. At this critical physical place at the heart of California Delta, an inter-disciplinary and equal-weighted policy balance is necessary to meet both the immediate and long-term requirements for rehabilitation of the project site. Exhibiting the collected work of a small team of design and policy specialists, the Case Study Report for the Sherman Island Delta Project outlines the multitude of interests, disciplines and potential opportunities for design expression on the selected 1,000 acre portion of Sherman Island under review. Funded principally by a generous grant from the Delta Alliance, the team researched applicable uses and technologies with a pragmatic case study approach to the subject, physically documenting exhibitions of each technology as geographically close to the project site as possible. After study and on-site documentation, the team compiled this wealth of discovery in three substantive chapters: a site characterization report, the stakeholders & goals assessment, and a case study report. -

Sherman Island Wetland Restoration Project (Project) Is Composed of Two Phases
Section 5: Project Description 1. Project Objectives: The Sherman Island Wetland Restoration Project (Project) is composed of two phases. The first phase includes constructing a 700 acre wetland restoration area on the west side of the Antioch Bridge and the second phase includes constructing a 1000 acre wetland restoration area on the northeast side of the Antioch Bridge. This Project also incorporates elements of uplands and riparian forest, on the perimeter and on upland areas, including berms and islands. There are no aspects of this project that are required by law or permit condition, thus this project is truly “Additional”. Furthermore, since Sherman Island is significantly subsided, with land elevations between 10 and 25 feet below sea level, all sequestered GHG will be “Permanent”. Subsided Delta islands are like bowls and if tule wetlands are constructed and permanently flooded, these bowls over time will fill up with rhizome root material (or Carbon). And if these lands are flooded permanently, and agricultural activities do not subject the peat material to oxygen or fertilizers, the underlying peat will not continue to emit GHG into the atmosphere and allow subsidence. Some potential risks to “Permanence” would include fire and land management changes that would convert these wetlands back into agricultural fields. However, fire risk is greatly diminished since these projects will be permanently flooded and since DWR owns this property, the likelihood of returning these lands to agriculture is remote. Lastly, the flood risk on Sherman Island is significant but if this were to occur, the carbon sequestered would be under water and essentially capped, with very little GHG release. -
Subsidence Reversal for Tidal Reconnection
PERFORMANCE MEASURE 4.12: SUBSIDENCE REVERSAL FOR TIDAL RECONNECTION Performance Measure 4.12: Subsidence Reversal for Tidal Reconnection Performance Measure (PM) Component Attributes Type: Output Performance Measure Description 1 Subsidence reversal 0F activities are located at shallow subtidal elevations to prevent net loss of future opportunities to restore tidal wetlands in the Delta and Suisun Marsh. Expectations Preventing long-term net loss of land at intertidal elevations in the Delta and Suisun Marsh from impacts of sea level rise and land subsidence. Metric 1. Acres of Delta and Suisun Marsh land with subsidence reversal activity located on islands with large areas at shallow subtidal elevations. This metric will be reported annually. 2. Average elevation accretion at each project site presented in centimeters per year. This metric will be reported every five years. Baseline 1. In 2019, zero acres of subsidence reversal on islands with large areas at shallow subtidal elevations. 2. Short-term elevation accretion in the Delta at 4 centimeters per year. 1 Subsidence reversal is a process that halts soil oxidation and accumulates new soil material in order to increase land elevations. Examples of subsidence reversal activities are rice cultivation, managed wetlands, and tidal marsh restoration. DELTA PLAN, AMENDED – PRELIMINARY DRAFT NOVEMBER 2019 1 PERFORMANCE MEASURE 4.12: SUBSIDENCE REVERSAL FOR TIDAL RECONNECTION Target 1. By 2030, 3,500 acres in the Delta and 3,000 acres in Suisun Marsh with subsidence reversal activities on islands, with at least 50 percent of the area or with at least 1,235 acres at shallow subtidal elevations. 2. An average elevation accretion of subsidence reversal is at least 4 centimeters per year up to 2050.