A Comparative Study on Field Oriented Control and Direct Torque Control for Permanent Magnet Linear Synchronous Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

General Information on Logistics for the Second International Symposium on Nuclear Power Plant Life Management Shanghai, China, 15-18 October 2007 ______
General Information on Logistics for the Second International Symposium on Nuclear Power Plant Life Management Shanghai, China, 15-18 October 2007 __________________________________________________________________________________ Symposium Venue: Shanghai International Convention Center (Oriental Riverside Hotel) 2727, Riverside Avenue Shanghai 200120 China Tel: +86 21 50370000 Fax : +86 21 50370045 Email: [email protected] Web site: www.shicc.net The Shanghai International Convention Center is located in the heart of Lujia Zui - Shanghai's Financial & Trade Zone and southwest of the Oriental Pearl Tower. See map on this web site. Registration: The Registration Desk at the Shanghai International Convention Center (7th floor in front of the Grand Ballroom) will be open on Sunday, 14 October 2007 from 16:00 to 18:00 hours and on Monday, 15 October from 8:00 hours onwards. Registration is also possible throughout the week during the working hours of the symposium. Participants are requested, if possible, to register on Sunday, 14 October 2007. No registration fee is charged. Opening of the Symposium: Monday, 15 October 2007, at 09:00 hours. Documentation: A preliminary programme is available on the symposium web site. The final programme and the Book of Extended Synopses will be available upon registration. Proceedings: The proceedings of the symposium will be published by the IAEA as soon as possible after the meeting. Accommodation: Participants are expected to make their own travel and hotel arrangements. Block reservations have been made in the following three hotels: Oriental Riverside Hotel (Shanghai International Convention Center), Tong Mao Hotel, Embassy Suite Hotel. It has been possible to extend the deadline from 30 June to 31 July. -
This Is a Sample Copy, Not to Be Reproduced Or Sold
Startup Business Chinese: An Introductory Course for Professionals Textbook By Jane C. M. Kuo Cheng & Tsui Company, 2006 8.5 x 11, 390 pp. Paperback ISBN: 0887274749 Price: TBA THIS IS A SAMPLE COPY, NOT TO BE REPRODUCED OR SOLD This sample includes: Table of Contents; Preface; Introduction; Chapters 2 and 7 Please see Table of Contents for a listing of this book’s complete content. Please note that these pages are, as given, still in draft form, and are not meant to exactly reflect the final product. PUBLICATION DATE: September 2006 Workbook and audio CDs will also be available for this series. Samples of the Workbook will be available in August 2006. To purchase a copy of this book, please visit www.cheng-tsui.com. To request an exam copy of this book, please write [email protected]. Contents Tables and Figures xi Preface xiii Acknowledgments xv Introduction to the Chinese Language xvi Introduction to Numbers in Chinese xl Useful Expressions xlii List of Abbreviations xliv Unit 1 问好 Wènhǎo Greetings 1 Unit 1.1 Exchanging Names 2 Unit 1.2 Exchanging Greetings 11 Unit 2 介绍 Jièshào Introductions 23 Unit 2.1 Meeting the Company Manager 24 Unit 2.2 Getting to Know the Company Staff 34 Unit 3 家庭 Jiātíng Family 49 Unit 3.1 Marital Status and Family 50 Unit 3.2 Family Members and Relatives 64 Unit 4 公司 Gōngsī The Company 71 Unit 4.1 Company Type 72 Unit 4.2 Company Size 79 Unit 5 询问 Xúnwèn Inquiries 89 Unit 5.1 Inquiring about Someone’s Whereabouts 90 Unit 5.2 Inquiring after Someone’s Profession 101 Startup Business Chinese vii Unit -

Narrative Inquiry Into Chinese International Doctoral Students
Volume 16, 2021 NARRATIVE INQUIRY INTO CHINESE INTERNATIONAL DOCTORAL STUDENTS’ JOURNEY: A STRENGTH-BASED PERSPECTIVE Shihua Brazill Montana State University, Bozeman, [email protected] MT, USA ABSTRACT Aim/Purpose This narrative inquiry study uses a strength-based approach to study the cross- cultural socialization journey of Chinese international doctoral students at a U.S. Land Grant university. Historically, we thought of socialization as an institu- tional or group-defined process, but “journey” taps into a rich narrative tradi- tion about individuals, how they relate to others, and the identities that they carry and develop. Background To date, research has employed a deficit perspective to study how Chinese stu- dents must adapt to their new environment. Instead, my original contribution is using narrative inquiry study to explore cross-cultural socialization and mentor- ing practices that are consonant with the cultural capital that Chinese interna- tional doctoral students bring with them. Methodology This qualitative research uses narrative inquiry to capture and understand the experiences of three Chinese international doctoral students at a Land Grant in- stitute in the U.S. Contribution This study will be especially important for administrators and faculty striving to create more diverse, supportive, and inclusive academic environments to en- hance Chinese international doctoral students’ experiences in the U.S. Moreo- ver, this study fills a gap in existing research by using a strength-based lens to provide valuable practical insights for researchers, practitioners, and policymak- ers to support the unique cross-cultural socialization of Chinese international doctoral students. Findings Using multiple conversational interviews, artifacts, and vignettes, the study sought to understand the doctoral experience of Chinese international students’ experience at an American Land Grant University. -

Kūnqǔ in Practice: a Case Study
KŪNQǓ IN PRACTICE: A CASE STUDY A DISSERTATION SUBMITTED TO THE GRADUATE DIVISION OF THE UNIVERSITY OF HAWAI‘I AT MĀNOA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN THEATRE OCTOBER 2019 By Ju-Hua Wei Dissertation Committee: Elizabeth A. Wichmann-Walczak, Chairperson Lurana Donnels O’Malley Kirstin A. Pauka Cathryn H. Clayton Shana J. Brown Keywords: kunqu, kunju, opera, performance, text, music, creation, practice, Wei Liangfu © 2019, Ju-Hua Wei ii ACKNOWLEDGEMENTS I wish to express my gratitude to the individuals who helped me in completion of my dissertation and on my journey of exploring the world of theatre and music: Shén Fúqìng 沈福庆 (1933-2013), for being a thoughtful teacher and a father figure. He taught me the spirit of jīngjù and demonstrated the ultimate fine art of jīngjù music and singing. He was an inspiration to all of us who learned from him. And to his spouse, Zhāng Qìnglán 张庆兰, for her motherly love during my jīngjù research in Nánjīng 南京. Sūn Jiàn’ān 孙建安, for being a great mentor to me, bringing me along on all occasions, introducing me to the production team which initiated the project for my dissertation, attending the kūnqǔ performances in which he was involved, meeting his kūnqǔ expert friends, listening to his music lessons, and more; anything which he thought might benefit my understanding of all aspects of kūnqǔ. I am grateful for all his support and his profound knowledge of kūnqǔ music composition. Wichmann-Walczak, Elizabeth, for her years of endeavor producing jīngjù productions in the US. -
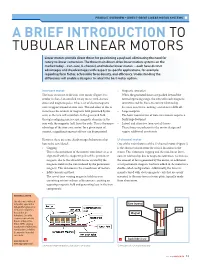
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

HIV-1 Transmitted Drug Resistance-Associated Mutations
Jiao et al. BMC Infectious Diseases 2014, 14:689 http://www.biomedcentral.com/1471-2334/14/689 RESEARCH ARTICLE Open Access HIV-1 transmitted drug resistance-associated mutations and mutation co-variation in HIV-1 treatment-naïve MSM from 2011 to 2013 in Beijing, China Yang Jiao1,2†, Shuming Li2†, Zhenpeng Li1, Zheng Zhang2, Jianhong Zhao2,LiLi2, Lijuan Wang2, Qianqian Yin1, Yan Wang1, Zhaoli Zeng2, Yiming Shao1* and Liying Ma1* Abstract Background: Transmitted drug resistance (TDR) is an important public health issue, because TDR-associated mutation may affect the outcome of antiretroviral treatment potentially or directly. Men who have sex with men (MSM) constitute a major risk group for HIV transmission. However, current reports are scarce on HIV TDR-associated mutations and their co-variation among MSM. Methods: Blood samples from 262 newly diagnosed HIV-positive, antiretroviral therapy (ART)-naïve MSM, were collected from January 2011 and December 2013 in Beijing. The polymerase viral genes were sequenced to explore TDR-associated mutations and mutation co-variation. Results: A total of 223 samples were sequenced and analyzed. Among them, HIV-1 CRF01_AE are accounted for 60.5%, followed by CRF07_BC (27.8%), subtype B (9.9%), and others. Fifty-seven samples had at least one TDR-associated mutation, mainly including L10I/V (6.3%), A71L/T/V (6.3%), V179D/E (5.4%), and V106I (2.7%), with different distributions of TDR-associated mutations by different HIV-1 subtypes and by each year. Moreover, eight significant co-variation pairs were found between TDR-associated mutations (V179D/E) and seven overlapping polymorphisms in subtype CRF01_AE. -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Methods for Improving Efficiency of Linear Induction Motor for Urban
512 Methods for Improving Efficiency of Linear Induction Motor for Urban Transit∗ Nobuo FUJII∗∗, Toshiyuki HOSHI∗∗ and Yuichi TANABE∗∗ To improve the efficiency of the linear induction motors (LIMs) for transportation, the compensation of end effect for LIM with the restriction of length and the long LIM with small end effect essentially are discussed respectively. Based on the proposed concept, the com- pensation method of the magnet rotator type and AC coil type of compensators are developed respectively. The utility is not yet confirmed. As for the long LIM with length of 10 m, the analysis shows that the efficiencies are about 85% at 40 km/h and above 90% at 360 km/h respectively. Key Words: Linear Motor, Linear Induction Motor, LIM, Linear Drives, Transportation, Traction, Subway, Electromagnetic Analysis, End Effect, Compensator length of LIM, the compensation of end effect is the only 1. Introduction method for remarkable improve of the characteristics. The In a part of new type transit, linear induction motors compensating winding method was proposed previous- (1) ff (LIMs) have been used as a direct electromagnetic drive ly , but it was not e ective. The authors have proposed ff (2) device without adhesion. In Japan, the LIM-driven train the new type of end e ect compensator . The proposed ff has been used in the subway in some large cities, as the method is based on the new concept that the end e ect can LIM reduces the construction cost of tunnel because the be compensated only by supplying the eddy current syn- thin shape makes the sectional area of tunnel small and the chronizing with the LIM frequency in front of LIM, which large gradability enables the minimum length of the route. -

Association of DNA with Nuclear Matrix in in Vitro Assembled Nuclei
Cell Research (1997), 7, 107-117 Association of DNA with nuclear matrix in in vitro as- sembled nuclei induced by rDNA from Tetrahymena shang- haiensis in Xenopus egg extracts CHEN YING, BO ZHANG, XIU FEN LI, ZHONG HE ZHAI Department of Cell Biology and Genetics, College of Life Sciences, Peking University, Beijing 100871 ABSTRACT The nuclei assembled from exogenous DNA or chro- matin in egg extracts resemble their in vivo counterparts in many aspects. However, the distribution pattern of DNA in these nuclei remains unknown. We introduced rDNA from the macronuclei of Tetrahymena into Xenopus cell- free extracts to examine the association of specific DNA sequences with nuclear matrix (NM) in the nuclei assem- bled in vitro. Our previous works showed the 5'NTS (non- transcription sequences) of the rDNA specifically bind to the NM system in the macronuclei. We show now the rDNA could induce chromatin assembly and nuclear for- mation in Xenopus cell-free system. When we extracted the NM system and compared the binding affinity of differ- ent regions of rDNA with the NM system, we found that the 5'NTS still hold their binding affinity with insoluble structure of the assembled nuclei in the extracts of Xeno- pus eggs. Key words: Nuclear assembly, nuclear matrix, Xeno- pus egg extracts, Tetrahymena rDNA. On the occasion of Professor Lu Ji SHI's (L. C. Sze), eightieth birthday, we present this paper and extend our sincere greetings to Professor SHI. As we mentioned in our paper, in early 1950's, it is Professor SHI who first studied the behavior of exogenous homologous desoxyribose nucleoprotein (chromatin) in amphibian eggs. -

Electromagnetic Launcher: Review of Various Structures
Published by : International Journal of Engineering Research & Technology (IJERT) http://www.ijert.org ISSN: 2278-0181 Vol. 9 Issue 09, September-2020 Electromagnetic Launcher : Review of Various Structures Siddhi Santosh Reelkar Prof. Dr. U. V. Patil Department of Electrical Engineering, Department of Electrical Engineering, Government College of Engineering, Government College of Engineering, Karad Karad Prof. Dr. V. V. Khatavkar Department of Electrical Engineering, P.E.S. Modern college of Engineering, Pune Hrishikesh Mehta Utkarsh Alset Aethertec Innovative Solutions, Aethertec Innovative Solutions, Bavdhan, Pune Bavdhan, Pune Abstract— A theoretic review of electromagnetic coil-gun This paper is mainly focusing the basic principle of launcher and its types are illustrated in this paper. In recent electromagnetic coil-gun launcher, inductance and resistance years conventional launchers like steam launchers, chemical calculations, construction and modeling concept of different launchers are replaced by electromagnetic launchers with coil-gun launcher. auxiliary benefits. The electromagnetic launchers like rail- gun and coil-gun elevated with multi pole field structure delivers II. WORKING PRINCIPLE great muzzle velocity and huge repulse force in limited time. Rail gun has two parallel rails from which object is launched. Various types of coil-gun electromagnetic launchers are When current passes through the rails to the object it compared in this paper for its structures and characteristics. The paper focuses on the basic formulae for calculating the produces arc. Because of high current pulse it has more values of inductance and resistance of electromagnetic contact friction losses [4]. Compare to the rail-gun launcher, launchers. Coil-gun launchers have no contact friction losses as there is no electrical contact between coils and object. -

The Research of Sensorless Vector Control for Permanent Magnet Linear Synchronous Motor
1184 JOURNAL OF COMPUTERS, VOL. 8, NO. 5, MAY 2013 The Research of Sensorless Vector Control for Permanent Magnet Linear Synchronous Motor Jun Zhu School of Electrical Engineering and Automation, Henan polytechnic University, Jiao Zuo, China Control Engineering Open Lab. of Key Subjects of Henan, Henan polytechnic University, Jiao Zuo, China Email: [email protected] Baoyu Xu1, Xudong Wang2, Haichao Feng2 and Xiaozhuo Xu2 1School of Mechanical and Power Engineering, Henan Polytechnic University, Jiaozuo, China 2School of Electrical Engineering and Automation, Henan polytechnic University, Jiao Zuo, China Email: {xubaoyu, wangxd, fhc, xxz}@hpu.edu.cn Abstract—Permanent Magnet Linear Synchronous Motor photoelectric encoder, hall sensor, eddy current sensor, has been used widely in the industrial application and rotary encoder, grating ruler and so on. However, the transportation system. However, a need of mechanical using of mechanic sensor not only increases the cost of sensors is a drawback for its control system, which restricts drive equipment, but also makes the driving system much the application range seriously. In order to solve the above drawback, the sensorless vector control method was larger and unstable [4]. In recent years, the sensorless proposed in the paper. The mathematic model was control systems have been researched to solve the above established for the sensorless vector control of PMLSM, so disadvantages. It can eliminate the need for speed and that it can provide the estimate parameters to realize the position sensors, so the structure of control system is sensorless control. According to the extended kalman filter more simple, the costs is reduced, meanwhile, the algorithm, the simulation experiment model was stability and control precision are improved[5].